
Fターム[3C007KX08]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411) | 指、吸着パッドに設けるもの (181)
Fターム[3C007KX08]に分類される特許
1 - 20 / 181
ロボットハンド及びロボット装置
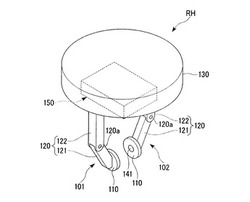
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
真空ピンセットおよび真空吸着方法
【課題】手作業による操作ミスがあったとしても被処理体の吸着ミスを防止し、確実に吸着・脱着動作を行うことが可能な真空ピンセットを提供する。
【解決手段】本発明の真空ピンセットは、長尺状の本体2と、前記本体の一端部に設けられ、平板状の被処理体を吸着し保持する第一機能部10、および、前記被処理体とは異なる対象物の有無を識別する第二機能部20と、を少なくとも備えた真空ピンセット1A(1)であって、前記第二機能部における前記対象物の有無の識別結果に基づき、前記第一機能部における前記被処理体の吸着条件を切り替える制御手段30を有すること、を特徴とする。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
脚式ロボット
【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
非接触吸着装置
【課題】面状部材を安定且つ位置ずれの少ない状態で非接触吸着して面状部材へのストレスを低減できると共に簡易な構成で安価に実現できる非接触吸着装置を提供する。
【解決手段】基体1から噴出する流体による負圧により面状部材4を非接触吸着する非接触吸着装置であって、基体1の一側は凹部5が設けられ、凹部5には前記流体を噴出する第一流体噴出部6が設けられ、凹部5の周囲には面状部材4を非接触吸着する非接触吸着部2が設けられ、凹部5内にして第一流体噴出部6にはガイド体7が対設され、第一流体噴出部6から噴出した流体が前記ガイド体7により外方向に案内され、非接触吸着部2を通過することで生ずる負圧により面状部材4が非接触吸着部2に非接触吸着されるように構成されている。
(もっと読む)
把持搬送装置
【課題】接触センサ自体が、周囲の物体との干渉要因になり難いようにするとともに、複数の把持爪で対象物を把持する時に、当該対象物もしくはこれの周囲にある物体と当該把持爪との接触を検出できるようにする。
【解決手段】対象物を把持する複数の把持爪3と、把持爪3を動作可能に保持して移動する保持移動体5と、物体との接触を検出する接触センサ7とを備える。接触センサ7は、その一部が把持爪3の内部に配置されるように把持爪3の先端部に組み込まれている。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット
【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
1 - 20 / 181
[ Back to top ]