
Fターム[3C007LU01]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 速度制御 (170)
Fターム[3C007LU01]の下位に属するFターム
加速度制御 (78)
加速、減速の制御 (25)
速度パターンを用いるもの (12)
速度の補正 (16)
Fターム[3C007LU01]に分類される特許
1 - 20 / 39
移動ロボット
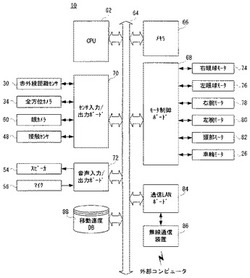
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
力制御装置

【課題】力制限を超過した際にロボットを停止処理する場合においても、作用力が許容値以下となる制約を満たす範囲で、動作時間の短縮化、立上げ調整時間の短縮化を図る。
【解決手段】対象物に対するロボットの目標位置指令を生成する指令生成手段(10)と、目標位置指令に応じて追従制御を行うロボット制御手段(20)と、対象物からロボットへ働く作用力が所定の力制限値を超過した場合に停止指令を生成する力制限超過判別手段(30)と、ロボットを減速停止させる場合を考慮して、対象物の特性および所定の力制限値に基づいて、減速停止中において作用力が所定の許容値以下になる制約を満たす範囲で動作速度を最大にする最適速度を算出する速度最適化手段(40)とを備え、指令生成手段(10)は、最適速度に応じた目標位置指令を生成し、停止指令を受信した場合には、ロボットを減速停止させる指令を生成する。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
ロボット、及びその制御方法
【課題】被誘導者を適切に誘導することができるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボットは、ハンドを有する腕部と、脚部と、胴体部と、を有し、人201を誘導して移動するロボットであって、所定のロボット位置におけるハンドの目標位置とハンドの測定位置との偏差に応じて、ロボットに対する被誘導者の追従状態を推定する追従状態推定部136と、追従状態の推定結果に応じて、ロボットの移動速度を調整する歩行調整部137と、歩行調整部137によって調整された移動速度に応じて前記ロボットを移動させるよう、脚部を駆動する駆動制御部138と、を備えたものである。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、ハンドガイドロボット1による一連の作業を複数の作業工程に分割し、該作業工程毎に各軸方向への移動および各軸回りの回転それぞれの自由度について、個別に制限または非制限を制御テーブルとして設定し、制御装置40により、各作業工程毎の制御テーブルに応じてマニピュレータを駆動制御し、操作者からの作業工程切替指示を受け付ける。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30(入力手段)を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、移動制限設定ボタンスイッチB1および回転制限設定ボタンスイッチB2により、軸方向への移動および軸回りの回転の自由度について、1以上の自由度を制限または非制限を設定し、制御装置40により、操作者の複数の設定手段を介した自由度の制限または非制限の設定に応じてマニピュレータを駆動制御する。
(もっと読む)
ロボット制御装置
【課題】状況に応じてツールセンターポイントの移動速度を操作子の操作により操作性良く調整すること。
【解決手段】操作子の原点からの操作量に対するツールセンターポイントの移動速度の変化量の特性データを、次のような特性に定義する。即ち、操作子の原点からの操作量が小さいレンジ(操作量=0〜±a1)では、操作子の操作量に対するツールセンターポイントの移動速度の変化量を相対的に小さくする。操作子の原点からの操作量が大きいレンジ(操作量=±a1〜±a2)では、操作子の操作量に対するツールセンターポイントの移動速度の変化量を相対的に大きくする。操作子を原点に近いところで操作した場合と、原点から離れたところで操作子を操作した場合とで、操作の変化量が同じでも後者の方が、ツールセンターポイントの移動速度の変化量が大きくなるようにする。
(もっと読む)
電動アクチュエータ
【課題】終点に移動した移動体を被押し当て体に押し当てることができ、被押し当て体のクランプ又は被圧入体への圧入を可能にした電動アクチュエータを提供する。
【解決手段】電動アクチュエータ11は、スライダ13の位置情報を検出するエンコーダ20と、スライダ13の速度調節器42a,42bと、スライダ13の移動距離を学習する学習部と、学習部を動作させるための操作釦44a,44bと、電動モータMに駆動信号を出力する制御部30と、スライダ13の推力調節器43とを有する。電動アクチュエータ11の制御部30は、スライダ13を終点に位置させた後、推力調節器43の操作に応じて設定された推力に基づき電動モータMに駆動信号を出力して、スライダ13に推力を発生させてスライダ13をワークに押し当てる。その結果、挟持体と電動アクチュエータ11のスライダ13とでワークをクランプすることができる。
(もっと読む)
脚式歩行ロボットの歩容生成器
【課題】実験やシミュレーションによる試行錯誤的なパターン生成作業や,ハードディスクなどの大容量記録媒体を必要とせず,両脚支持期を含む歩容でも容易に高速にオンライン生成することができる二足歩行ロボットの歩容生成器を提供する。
【解決手段】1歩の片脚支持の時間を定常歩容でも過渡歩容でも同じ固定値とし,倒立振子モデルより得られた数式により歩容を生成する。1歩ごとに歩行速度指令を確認し,新しい歩行速度指令が前回の歩行速度指令と同じならば定常歩容を生成し,異なれば2歩先の着地時に新しい歩行速度指令での定常歩容となるように過渡歩容の前後方向着地位置を決定する。両脚支持期にはZMPが常に重心の真下となるように歩容を生成する。
(もっと読む)
力バランス移動ロボットシステム
力バランスロボットシステムおよび関連する方法が開示される。ロボットシステムは、本体と、バランス部材と、バランスシステムとを含み得る。ロボットシステムは、静的に不安定であり得、これは静的に不安定な本体を有する結果であり得る。バランス部材は、本体にジョイントで接続され得る。バランスシステムは、ロボットシステムのバランスを動的に取るために用いられる1つ以上のサブシステムを有し得る。そのようなサブシステムは、再位置決めシステムと、加速システムと、駆動システムとを含み得る。再位置決めシステムは、バランス部材を再位置決めして、質量中心を目標の上方に位置決めすることができる。加速システムは、バランス部材を加速させて、目標トルクを生じることができる。駆動システムは、前記ロボットシステムの車輪を駆動して、バランスを維持することができる。バランスを保持しながら、ロボットシステムは、外力を吸収し、外部対象物に力を加え得る。 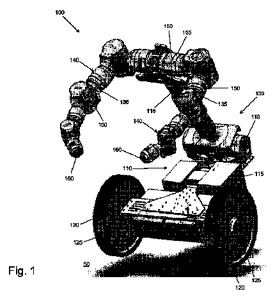 (もっと読む)
(もっと読む)
医療用ロボット、および医療用ロボットのパフォーマンス要求事項を充足する方法
本発明は、医療用ロボット(R)、および医療用ロボット(R)のパフォーマンス要求事項を充足する方法に関する。ロボット(R)は、複数の軸(1〜6)と制御装置(17)とを有する。医療用工具(21〜24)は、ロボット(R)の取付装置(18)に取り付けられ、ロボット(R)の作業領域(30)は、そのロボット(R)がそれら医療用工具(21〜24)のパフォーマンス要求事項を充足するように、特に信頼度の高い技術で制御装置(17)によって設定される。 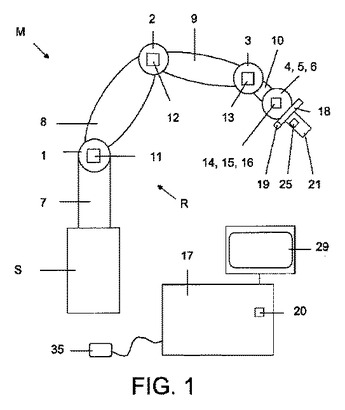 (もっと読む)
(もっと読む)
移動体の位置設定装置とその位置設定方法
【課題】 目視に加えて機械的な検知によって移動体を母体に非常に近接させることができる位置設定装置を提供すること。
【解決手段】 母体模型10に近接させる移動体模型20に移動体模型近似部201〜205を設定し、この移動体模型近似部201〜205に近接領域211〜215を設定し、前記移動体模型20を移動させる携帯式操作盤30を操作して移動体模型20を前記母体模型10に向けて移動させ、母体模型10の母体模型近似部101,102が前記移動体模型20に設定した移動体模型近似部201〜205に侵入すると、前記携帯式操作盤30に母体模型近似部101,102が近接領域211〜215に侵入したことを表示する。
(もっと読む)
経路計画装置及び経路計画方法
【課題】経路計画の演算が迅速に行え、移動体の移動経路の平滑化が図れる経路計画装置及び経路計画方法を提供すること。
【解決手段】移動体の経路計画を行う経路計画装置1であって、関数値の増加領域、一定領域、減少領域の三領域を有するテナリー多項式関数T(x)を用いてロボットの移動部分の移動経路の平滑化を行う移動経路平滑化部21を備えている。このテナリー多項式関数を用いて移動体の移動経路の平滑化を行うことにより、移動体の平滑な移動経路を迅速
(もっと読む)
コミュニケーションロボットとその動作方法
【課題】サービスを依頼し易いコミュニケーションロボットを提供する。
【解決手段】眼カメラ20が設けられた頭部52と、広視野カメラ53が設けられた胴部54と、頭部を回転させる頭部制御手段61と、コミュニケーションの成立を合図する合図動作制御手段63とを有するコミュニケーションロボットであって、眼カメラ20及び広視野カメラ53の画像を処理する画像処理手段62を有する。頭部52を所定速度で回転する見回り動作を行いながら、広視野カメラ53の画像から予め検出した人の位置で回転速度を落とし、眼カメラ20の画像からロボットに顔を向ける正面顔の人を検出し、検出した場合に合図を送る。サービスを求める人は、ロボットが見回り動作を行っていれば、サービス可能であると知ることができ、ロボットが自分の方を向いたときにロボットを見ていれば、ロボットにサービスを依頼できる。
(もっと読む)
ロボット制御装置
【課題】ロボット本体に加えて付加軸をも制御する機能を備えるものにあって、手動操作時における十分な安全性を確保する。
【解決手段】作業者がティーチングペンダント4を手動操作することにより、ロボット本体3及び付加軸8〜10を動作させる手動操作モードの実行時において、ロボット制御装置2の制御部12は、ロボット本体3の先端位置の速度及び付加軸8〜10の速度を制限する。このとき、付加軸8〜10の動作がロボット本体3の動作に影響を与えるリンク状態であるかを示すリンク情報が、予め動作パラメータ記憶部14に記憶される。制御部12は、付加軸8〜10がリンク状態である場合には、該当する付加軸の速度とロボット本体3の先端位置の速度とを合わせた全体の速度を最大速度(250mm/sec)以下に制限する。非リンク状態である場合には、付加軸8〜10の速度と、ロボット本体3の先端位置の速度との各々について、最大速度以下に制限する。
(もっと読む)
ロボット出力の測定方法および制限装置
【課題】ロボットが所定の作業を完遂するのに最低限度必要な出力を得て、その限度を超える出力を制限することで、ロボットと人との共存、協調を図ることにある。
【解決手段】ロボットの出力を、当該ロボットの各関節を駆動する各電動機について測定するに際し、前記関節の作動範囲内でエンドエフェクタTの、重力方向の最も低い位置を始点、最も高い位置を終点として、それら始点と終点との間で、制御し得る最大速度が途中で出るようエンドエフェクタTを加速および減速させるように前記ロボットに旋回動作を行わせ、前記ロボットの旋回動作中の、前記エンドエフェクタTを旋回させるためだけの機械的仕事率を測定し、前記エンドエフェクタTを旋回させるためだけの機械的仕事率を前記ロボットの出力とすることを特徴とする、ロボット出力の測定方法である。
(もっと読む)
ロボット制御システム
【課題】ロボットを予め教示されたルートに従って移動制御するロボット制御システムにおいて、常に2点間(開始点から目標点)のみの移動時間にて制御する。
【解決手段】目標ルートsと、目標時間Tと、教示ルートkと、前記教示ルートkに従い移動するロボット1と、からなるロボット制御システム100において、前記それぞれの教示点k(n)からの前記目標ルートsに対する垂線の足であるシフト教示点s(n)と、前記目標ルートsを、それぞれのシフト教示点s(n)によって区画するそれぞれの目標セクション[s(n)]と、前記目標ルートsを前記目標時間Tで等速移動する場合の前記それぞれの目標セクション[s(n)]のセクション目標時間t(n)と、を備え、前記ロボットは、前記それぞれの教示セクション[k(n)]上を、対応するセクション目標時間t(n)にて移動するロボット制御システム100。
(もっと読む)
ロボットおよびその制御方法
【課題】安全動作を行うとともに店舗内での業務能力の高いロボットを提供することを可能にする。
【解決手段】本体部と、この本体部に取り付けられ前記本体部を移動させる移動機構と、移動平面を含む空間内の対象物を撮像する撮像装置と、撮像装置によって撮像された画像に基づいて、空間内に存在する物体を検出する物体検出部と、物体検出部によって検出された前記物体までの距離を算出する距離算出部と、撮像装置によって撮像された画像および前記距離算出部によって算出された距離に基づいて、物体検出部によって検出された物体との警戒度を設定する警戒度設定部と、警戒度設定部によって設定された警戒度および距離算出部によって算出された距離に基づいて、移動機構を制御する制御部と、を備えている。
(もっと読む)
作業補助装置、作業補助方法及びその作業に使用するワーク回転装置
【課題】作業効率を過度に低下させることなく、目標軌道に沿ってツールを移動させることが容易な作業補助装置を提供する。
【解決手段】回転するワークに対して、ワーク上に予め設定された目標軌道に沿ってツールを移動させる作業を行う作業者を補助する作業補助装置であり、ワークを回転軸回りに回転させるワーク回転装置と、作業者から加えられた操作力に応じてツールの位置及び向きを変化させるツール移動装置と、ツールの位置を検出するツール位置検出手段と、ツールの向きを検出するツール向き検出手段と、検出されたツールの位置から回転軸までの距離が長いほどワーク回転装置の角速度を減少させ、検出されたツールの位置におけるワークの反移動方向と検出されたツールの向きとが成す角度が大きいほどワーク回転装置の角速度を減少させるようにワーク回転装置を制御する制御手段を有する。
(もっと読む)
ロボット制御装置
【課題】ロボットに対する外力を高感度で検出して、ロボットを高精度で停止させる。
【解決手段】プログラムに含まれる指定速度を指定速度以下に調節する指定速度調節手段(23)を有するロボット制御装置(10)が、ロボット(1)の手首に装着された力センサ(2)の検出値に基づいて前記ロボットの移動を停止する移動停止命令を解読する解読手段(38)と、指定速度調節手段を作用させずにプログラムの指定速度で、プログラムの指定方向にロボットを移動させる移動指令を作る移動指令手段(36)と、ロボットの移動開始時における力センサの検出値を基準値として、基準値からの変化分を力現在値として算出する力算出手段(31)と、ロボットが移動している間、力算出手段により所定周期で繰返し算出された力現在値を所定の力指定値と比較する比較手段(32)とを含む。力現在値が力指定値以上である場合は、移動指令手段はロボットを停止させる。
(もっと読む)
1 - 20 / 39
[ Back to top ]