
Fターム[3C007LV07]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 把持の制御 (337) | 把持位置の決定 (62)
Fターム[3C007LV07]に分類される特許
1 - 20 / 62
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
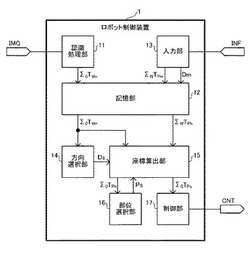
【課題】 物品の姿勢がランダムであっても、ロボットを用いて取り出し部位を把持して、物品を取り出す。
【解決手段】 複数の取り出し部位を備える物品の位置・姿勢情報に基づいて、前記複数の取り出し部位にそれぞれ設定された把持方向のうち、所定の方向となす角度が最小となる把持方向を選択方向として選択する方向選択部と、前記複数の取り出し部位のうち、前記把持方向として前記選択方向が設定された取り出し部位を把持して前記物品を取り出すようにロボットを制御する制御部と、を有する。
(もっと読む)
把持装置およびその制御方法

【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
切削部を有するワークの把持装置及び把持方法
【課題】把持されるワークの把持部に切削部がある場合でも、ワークの位置と姿勢のずれを回避し、ワークを正しくセンタリングして把持することができるワークの把持装置及び把持方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ワークを撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、ロボットを制御するロボット制御装置18とを備える。カメラ14により、ハンド12による把持面全体を含むワークの画像5を撮影し(S1)、ロボット制御装置18により、画像5を画像処理して把持面1aに存在する切削部2aを検出し、切削部2a以外の把持面1aを把持するようにハンド12の姿勢を制御してワーク1を把持する。
(もっと読む)
把持ロボットおよび把持方法
【課題】少ない計算コストで、確実かつ完全に、対象物を把持する技術を提供する。
【解決手段】把持ロボットは、アーム部と前記アーム部に設けられた1対のハンド部と前記1対のハンド部のそれぞれに設けられた指部とを有し、台上の対象物を把持する把持部と、前記把持部に設けられ、前記対象物を撮像するカメラ部と、前記把持部および前記カメラ部を制御する制御部とを備え、前記制御部は、前記カメラ部によって撮像された撮像画像内における重力方向を特定し、前記撮像画像内における重力方向に基づいて前記撮像画像内において前記対象物と前記台との境界部を検出し、前記境界部の位置に基づいて前記台と前記対象物との間に前記1対のハンド部のそれぞれの指部を挿入するように前記把持部を制御する。
(もっと読む)
回転板位置調整装置及び方法
【課題】構造が簡易で、回転板の微小変位に対応可能な、回転板位置調整装置及び方法を提供する。
【解決手段】吸着搬送装置51と認識カメラ7と制御装置10とを備えた回転板位置調整装置50において、上記吸着搬送装置に備わり回転板2の吸着動作を行う吸着ヘッド1は、ヘッド本体101と、上記回転板を吸着する金属製の吸着パッド102と、上記ヘッド本体と上記吸着パッドとを接合し、かつ上記回転板の姿勢に上記吸着パッドが倣うように変形する接着部103とを備えた。
(もっと読む)
対象物把持領域抽出装置および対象物把持領域抽出装置を用いたロボットシステム
【課題】
位置姿勢が未知な対象物が置かれた供給部の三次元情報から、ロボットの把持機構で把持可能な対象物を含む把持領域を抽出する。
【解決手段】
ロボットで把持する対象物の供給部の三次元計測データから供給部の三次元情報を生成し、予め記憶された把持機構領域と把持部分領域とからなる把持領域を用い、把持部分領域の全体に物体が存在し、把持機構領域に物体が存在していない領域を、三次元情報から把持可能領域として抽出する。
(もっと読む)
マニピュレータ装置およびマニピュレータの制御方法
【課題】先端部の形状を有効に利用して把持する物体の姿勢制御を行うことができるマニピュレータ装置および制御方法を提供する。
【解決手段】各先端アーム20,30の先端には、先端アーム本体52,72に対して捻転可能であり、物体に当接可能な凸曲面状の先端曲面部53,73を備える。第一駆動手段54a,54b,74a,74bにより、先端アーム本体52,72の基部に対する位置、姿勢の変更により、先端曲面部53,73の物体との接触位置における先端アーム軸に対する接触角度を変更できる。第二駆動手段54c、74cにより、先端アーム本体52,72に対する先端曲面部53,73の先端アーム軸周りの捻転角度を変更できる。制御手段2は、接触角度を変更すると共に捻転角度を変更することにより、接触角度に応じた物体の動作を物体に行わせる。
(もっと読む)
ハンドおよびマニプレータ装置
【課題】ワークの大きさが変化しても把持力を一定にでき、かつ、小型化を実現できるハンドを提供すること。
【解決手段】ハンド5は、アーム6の先端に設けられて異なる大きさのワークを把持する。このハンド5は、アーム6の先端に固定された固定部20と、この固定部20に接近または離間可能な可動部30と、を備える。固定部20は、所定方向に延出する2本の第1フィンガ22A、22Bを有し、可動部30の他方は、第1フィンガ22A、22Bに略平行に延出する3本の第2フィンガ32A〜32Cを有する。可動部30は、第2フィンガ32A〜32Cが第1フィンガ22A、22Bに対して略平行である状態を維持しつつ、この固定部20に対して接近または離間する。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
吸引保持方法、搬送装置、搬送方法、及び吸引保持装置
【課題】保持対象物が急激に引き寄せられることで、吹出す気体の圧力に抗して保持対象物が吸引保持面に接触することを抑制することができる吸引保持方法、搬送装置、搬送方法、及び吸引保持装置を提供する。
【解決手段】吸引保持方法は、旋回流発生室に発生させた気体の旋回流に生じる負圧と、旋回流発生室の吹出し口から吹出し口が開口した吸引保持面に流出する気体とにより、吸引保持面を有する吸引パットに、保持対象物を非接触で吸引保持する吸引保持方法であって、旋回流発生室に圧縮気体が供給されていない状態の吸引パットの吸引保持面を、保持対象物の被吸引保持面に対して、吸引パットが保持対象物を吸引保持している状態における吸引保持面と被吸引保持面との保持距離、又は保持距離より短い距離を隔てた吸引初期位置に位置させる工程と、吸引パットの旋回流発生室に圧縮気体を供給して、保持対象物を吸引して吸引保持状態にする工程と、を有する。
(もっと読む)
ワークピックアップ装置及び方法
【課題】把持手段をワークに適切に吸着させることができるワークピックアップ装置を提供すること。
【解決手段】ワークピックアップ装置1は、サーボシリンダ11を待機位置から下降させる下降手段21と、バキュームカップ13がブランク15を押圧する力に対応する物理量を検出する検出手段22と、検出した物理量と基準となる物理量とを比較する比較手段23と、比較結果に基づき、サーボシリンダ11を下降させるか停止させるかを制御する停止制御手段と、を含む。
(もっと読む)
搬送ロボット
【課題】高価な力センサや複雑な信号処理を不要にしつつ、吸着部材を適切な力で対象物に確実に押し付けた状態で対象物を吸着把持できる搬送ロボットを提供する。
【解決手段】
支持体5が取り付けられ、支持体を移動させるように動作する動作機構7と、吸着部材3を対象物に押し付けるために、吸着部材と支持体のうち吸着部材を移動方向前方側にして、吸着部材を対象物に向けて移動させる押付移動を動作機構に行わせる動作制御部11と、押付移動により吸着部材が対象物に押し付けられることで、吸着部材が弾性的に支持体側へ押し戻された量が所定量に達したかを検知する押付検知部9とを備える。押付検知部が、吸着部材の押し戻された量が所定量となったことを検知した時に、動作制御部は、押付移動を停止させる。
(もっと読む)
把持位置計算装置及び把持位置計算方法
【課題】マニピュレータでワークを把持する際に、外力に対して安定して把持する。
【解決手段】フィンガ14がワーク16をいずれかの姿勢で把持可能となる移動手段の位置を求める(S3)。ワーク16をフィンガ14の先端で把持する把持位置の初期位置P0を特定し、該初期位置P0を計算対象位置Pとする(S4)。その時点の計算対象位置Pでワーク16を把持した場合に、許容される外力の大きさを示す指標である許容外力Dpを算出する(S5)。計算対象位置Pの回りの複数の近傍点Pcで把持した場合の許容外力Dcをそれぞれ算出する(S6)。許容外力Dpがその回りの全てのDc以上である場合に、計算対象位置Pを把持候補位置として特定する(S9)。それ以外の場合に、許容外力Dcが最も大きい近傍点Pcを計算対象位置Pに更新し、ステップS5に戻る(S8)。
(もっと読む)
ロボット制御装置及び方法
【課題】コストの増加等の問題を生ずることなく、把持動作の成功率を向上させる。
【解決手段】本発明に係るロボット制御装置は、ロボットの体幹部に搭載され作業領域の画像情報を取得する撮像装置2と、撮像装置2により取得された画像情報に基づいて物体の位置を認識する物体位置認識部3と、物体位置認識部3により認識された物体の位置に基づいてアーム部を動作させるアーム制御部4と、撮像装置3により取得された画像情報に基づいてハンド部、物体、及び撮像装置の相対的な位置関係を認識し、この位置関係に基づいてハンド部が適正位置にあるか否かを判定するハンド位置判定部5と、ハンド部が適正位置にあると判定された場合にハンド部に物体を把持する動作を実行させるハンド制御部6と、ハンド部が適正位置にないと判定された場合にアーム部にハンド部を適正位置に移動させる動作を実行させるアーム修正動作部7とを備える。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
ロボット装置
【課題】ハンド部での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なうロボット装置を提供する。
【解決手段】アーム部20とハンド部30とアーム制御部200とを備えたマニュピレータ10において、ハンド部30は、掌部40と、指部50と、掌部40の押付力を検出するタクタイルセンサ42と、指部50の押付力を検出するタクタイルセンサ53と、指部50の掌部40に対する位置・姿勢を検出する力覚センサ51とを有し、アーム制御部200は、掌部40の押付力と、指部50の押付力と、指部50の掌部40に対する位置・姿勢とに基づいて、アーム部20の制御目標を設定する。これによりハンド部30における各種情報をフィードバックしてアーム部20の制御が行なわれ、ハンド部30での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なえる。
(もっと読む)
1 - 20 / 62
[ Back to top ]