
Fターム[3C007LV11]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423)
Fターム[3C007LV11]の下位に属するFターム
動作の開始又は進行に対する条件 (177)
プログラムの中断、再開 (23)
作業計画の決定 (79)
運転状態の切替 (114)
Fターム[3C007LV11]に分類される特許
1 - 20 / 30
ロボット制御装置、ロボット制御方法、およびプログラム
【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
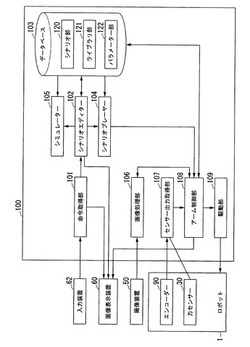
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
ロボット制御方法及びプログラム

【課題】サービスロボットの利用効率を向上すること。
【解決手段】ロボット制御方法において、ロボットの状態遷移の履歴を保持し、制御装置で発生されたロボットに対する割込要求を受け付け、ロボットが割込要求を割込可能の状態にない場合はロボットの状態遷移の履歴に基づいて割込要求に対して推定される割込処理の待ち時間を算出し、前記制御装置に対して待ち時間を提示するように構成する。前記状態遷移の履歴を保持する工程は、前記ロボットの状態遷移の履歴を状態遷移列の形で保持し、前記ロボットが任意の状態から異なる状態に遷移する状態遷移列の出現回数を求める工程を更に含み、前記待ち時間を算出する工程は、前記状態遷移列とその出現回数に基づいて前記待ち時間を算出する。
(もっと読む)
制御装置
【課題】タスクの実行開始を早めることができ、かつ、ロボットの動作が不連続性となることを防止することができるロボットの制御装置を提供する。
【解決手段】将来外界予測部130によりタスクの各実行段階における対象物の予測位置および予測姿勢を予め予測しておき、少なくともロボットRにより次に実行される実行段階におけるロボットRの目標軌道を生成しておく。
(もっと読む)
制御装置
【課題】処理負荷が増大することを抑制しつつ、ロボットに相互作用を伴うタスクを実行させることができるロボットの制御装置を提供する。
【解決手段】第1対象物T1に対して非接触状態から接触状態へ遷移する第1動作区分D1および第1対象物T1に対して接触状態から非接触状態へ遷移する第2動作区分D2では、ロボットRまたはロボットRと一体となった第2対象物T2と第1対象物T1との干渉判定を省略する。一方、これらの動作区分に連続する第3動作区分D3では、第1対象物T1を含めて干渉判定を実行する。
(もっと読む)
ハンガーラインへのワーク供給装置及び方法
【課題】移動する複数のハンガーのフックに、ハンガーの移動を停止することなく、かつフックの方向を制限することなく、特別な付帯設備を用いずに、ワークを安全かつ確実に吊下げることができ、ハンガーラインの速度を高めることができるハンガーラインへのワーク供給装置及び方法を提供する。
【解決手段】ワーク1を把持するハンド11を有し該ハンドを3次元的に移動可能なロボット12と、ロボットを制御するロボット制御装置と、ハンガーライン2内を移動するハンガー3の画像を撮影する撮像装置16と、ロボット制御装置へハンドの手先軌道を出力するリアルタイム計算機とを備える。撮影画像に基づきハンガー3に設けられたフック4の位置と姿勢を検出し、この検出結果に基づいてロボット12をフィードバック制御し、ワーク1を把持したハンド11をフック4の移動に追従させて移動しワーク1をフック4に吊下げる。
(もっと読む)
ロボットシステムの行為に基づくタスク実現方法
【課題】本発明はロボットシステムにおいて、行為に基づいてタスクを実現することができる行為に基づくタスク実現方法を提供する。
【解決手段】行為に基づくタスク実現方法は、複数のコンポーネントのうちの1つ以上のコンポーネントから1つ以上の基本行為を実現するステップ、1つ以上の基本行為から拡張可能行為を実現するステップ、および拡張可能行為から拡張行為を実現するステップを含む。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】動作制御部と動作指示部の電源が遮断された場合においても正常にロボットの動作停止を行え、また、正常に動作制御部と動作指示部を正常に終了するロボット制御装置およびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御装置1は、動作制御部2と動作指示部3と電源部5を備え、ロボット4が接続されている。動作制御部2は通信部201とプログラム記憶部203とプログラム実行部204とロボット制御部205と電源遮断検出部206とシャットダウン実行部207を備え、動作指示部3は通信部301と電源遮断信号抽出部302とデータ読出・書込部303とデータ記憶部304とシャットダウン信号生成部305とシャットダウン実行部306と電源制御信号生成部307を備え、電源部5は電力変換部501とUPS502と電源制御部503とスイッチ504を備えている。
(もっと読む)
搬送ロボット装置
【課題】搬送全工程の所要時間を短縮することができる搬送ロボット装置を提供する。
【解決手段】制御装置と、この制御装置とのハンドシェイクにより指示されるコマンドに対応した処理を実行可能であって、現コマンドの実行中に並行して次のコマンドを読み込み、これを、現コマンドに引き続いて実行する搬送ロボットとを備えた搬送ロボット装置とする。この場合、現コマンドの実行中に並行して次のコマンドが読み込まれ、その後実行される、という過程が順次行われることにより、一度のハンドシェイクで複数コマンドを連続して実行することができる。
(もっと読む)
ロボットの制御システムおよびリアルタイムOS
【課題】プロセスごとに規定時間までに処理を一区切りさせ、二重化したシステムに対して意味のない空プロセスを実行させておくことで、安全のための二重化システムに対して診断系の処理を行うことができるリアルタイムOS装置を提供する。
【解決手段】各プロセスは、自身の内容を意味のある最小単位の実行単位に分割し、予めそれぞれに掛かる時間を算出しておく。一定時間毎の割り込みが発生するときには、空プロセス9の状態になっており、残り時間が十分なので、次の最小単位の実行に移る。さらに、この最小実行単位が終了するごとに、次の最小実行単位にかかる時間と、割り込みまでの残り時間を比較し、残り時間が十分なら、次の最小実行単位の処理へ進み、残り時間が不足しているなら、空プロセス9を実行する。
(もっと読む)
ロボットコンポーネント管理装置及び方法
【課題】再使用性及びメンテナンスが向上し得る知能型ロボットにおいてロボットコンポーネントの管理装置及び方法を提供する。
【解決手段】多数のロボットコンポーネントを含むロボット応用構成部と、前記ロボット応用構成部の動作を管理し、前記ロボット応用構成部の動作による状態情報及び前記ロボットコンポーネントに関する情報をモニタリングするロボット応用管理部と、前記ロボット応用管理部の管理によって前記ロボットコンポーネントのライフサイクルを管理するライフサイクル管理部と、前記センサにより感知された周辺環境の認識によるセンシング信号の入力を受けて前記ロボット応用構成部に伝達したり、前記ロボット応用構成部からの実行信号を前記知能型ロボットシステムのアクチュエータに伝達する運営体制とを含む。従って、ロボットコンポーネントの開発が迅速、且つ、容易であるだけでなく、エラーを最少化できる。
(もっと読む)
カスタマイズ可能ロボットサービスシステム及びロボットサービスの遠隔カスタマイズ方法
【課題】 店舗等で商品紹介を行うサービスロボットは予め設定されたコンテンツをスケジュールに従い商品紹介を場の状況に併せて急な変更に対応できない、あるいは、商品の販促を直接行うメーカはロボットのスケジュールと調整し、その時間対応でコンテンツを準備する必要があり、柔軟に自社の販促を行えない問題がある。
【解決手段】 ロボットに標準リソースとカスタマイズのための差し替え可能リソースを含むサービス構成リソース群で定まる手順によりサービスを行わせる構成とし、差し替え可能リソースにカスタマイズリソースを定義してロボットに設定してカスタマイズされたサービスをロボットが実行する。
(もっと読む)
物品管理システム及び物品管理方法及び物品管理プログラム
【課題】人とロボットの協調作業において、物品の置き場所によって生じる無駄な時間の発生を防ぐ物品管理システム及び物品管理方法及び物品管理プログラムを提供する。
【解決手段】センシング情報を記録する検出履歴データベース304と、人とロボットそれぞれの作業工程の順序と、少なくとも各工程における取扱物品を記録する作業手順データベース306と、前記作業手順の進捗を管理する作業進捗管理手段307と、前記検出履歴データベースから得られる現在の物品の位置と、前記作業手順データベースに記録された作業手順を参照し、環境内の各場所に人が物品を置いたときに、前記物品を置いたことにより発生してしまう余計な困難解消時間を算出する困難解消時間算出手段311と、前記困難解消時間算出手段311により算出された困難解消時間に基づき情報提供する情報出力装置314を備える。
(もっと読む)
ロボットの制御プログラム構築方法およびロボットシステム
【課題】 生活空間において,移動ロボットが種々の物品の把持や,会話による動作など,多様な動作を実現するためのロボット制御プログラムの作成において,プログラムの複雑化を抑制し,操作者の負担を軽減できるプログラミング環境を提供する。
【解決手段】 物品の把持シーケンスプログラムを,データベースの物品情報ごとに記憶し,ロボット10の制御プログラムの実行時に,把持対象物品の電子タグ情報を電子タグリーダ13で読み取り,その電子タグ情報をキーとしてデータベースより該物品の把持シーケンスを取得し,ロボット制御プログラムに挿入する,という手順で処理する。
(もっと読む)
ロボットの制御装置
【課題】CPUボードとゲートアレイボードとの組み合わせが様々に想定される場合でも、起動時間を極力短縮できるロボットの制御装置を提供する。
【解決手段】CPUボード31とFPGAボード35とを備える制御装置2において、CPU32は、電源が投入されると自身の初期化処理を行なった後に無限待機状態となり、FPGA36は、電源が投入された時点より開始されるコンフィギュレーションデータのロードが完了すると、CPUボード32側にレディ信号を継続的に出力する。そして、CPU32は、レディ信号が出力されたことを認識すると無限待機状態を解除して、FPGAボード35に搭載されている回路の初期化処理を開始する。
(もっと読む)
ロボットおよびロボットの制御方法
【課題】ドアを開けて出入口を通過することができるロボットおよびその制御方法を提供する。
【解決手段】制御手段は、次の工程を順に実行する。係合部30をドア取手101に係合させた状態で、走行体10の後退とロボットアーム20によるドア引き寄せ制御を実行し、ドア100を開く。この際、ドアの手先側の側縁100bがドアの回動中心と走行体10のドア側の側面の前端部10xとを結ぶ線を通過する。図3(B)〜(D)参照。次に、係合部30のドア取手101に対する係合状態を維持しながら、走行体10の旋回と前進を実行することにより、走行体10の前端部10xを、ドア100の回動軌跡と干渉する領域に位置させる。図3(E)参照。次に、係合部30のドア取手101に対する係合状態を解除する。図3(F)参照。次に、走行体10を前進させて出入口201を通過させる。図3(I),(J)参照。
(もっと読む)
ロボットクローラのための可変プリミティブマッピング
高レベル(オペレータ入力)プリミティブ42、64から低レベルプリミティブ46、70への可変マッピングを用いることによって、ロボットクローラ10の種々の動作モードが与えられる。そのマッピングは、ロボットクローラ10によって検知される環境データ74、94の関数であり、それにより、動作モードを環境に合わせることができるようになる。 (もっと読む)
ロボットシステム
【課題】検出したギャップ長が、溶接条件テーブルで設定されたギャップ長近傍において短周期で変化する場合でも安定した溶接が行えるロボットシステムを提供する。
【解決手段】センサ803によって検出した溶接線の位置に基づき溶接トーチ702の位置を補正するとともに、ギャップ長に応じて溶接条件を変更しながら溶接作業を行うロボットシステムにおいて、ロボット制御装置804は、ギャップ長とギャップ長に応じて段階的に変化する所定の前記溶接条件との対応を記録した溶接条件テーブル104と、ギャップ長の変化に伴う前記溶接条件の変更の遅れ量を設定する条件緩和パラメータ102と、溶接条件テーブル104での溶接条件の変化点に対応するギャップ長近傍における溶接条件の変更を条件緩和パラメータ102によって設定された分だけ遅らせて出力する条件緩和演算部101とを備える。
(もっと読む)
ロボットの制御方法、制御装置、制御プログラムおよび記録媒体
【課題】 ロボットが定型的に行う作業シーケンスを蓄積した作業データベースを構築できるようにする。
【解決手段】 作業シーケンスのデータベースから作業シーケンスを取得し(ステップ201)、前記作業シーケンスを上層から展開し(ステップ202)、対象物体固有の動作指令か否かを判別し(ステップ203)、対象物体固有の動作指令でなければ作業を実行し(ステップ206)、対象物体固有の動作指令であれば、対象物体ごとのデータベースから動作指令を取得し(ステップ204)、作業データを編集し(ステップ205)、作業を実行する(ステップ206)という手順で処理する。
(もっと読む)
ロボット制御システム、ロボット制御方法及びロボット
【課題】モデルの記述が容易で、計算量が少なく、さらにタスクや一部の部位を変更した場合にも対応が容易なロボット制御システム、ロボット制御方法およびロボットを提供すること。
【解決手段】本発明にかかるロボット制御システムは、ロボット1の各機能に対応して設けられ、対応する機能を制御可能な複数の制御部23〜27と、要求された主動作タスクを、前記複数の制御部23〜27に対応して細分化された細分化タスクに変換し、当該細分化タスクを前記複数の制御部23〜27に対して実行させるタスク制御部20,21とを備えたものである。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10はアンテナ58を含み、RFIDタグ12、14および16から送信されるかつRFIDの情報を重畳した電波を受信する。ユーザA、BおよびCは、それぞれ、タグ12,14および16を所持または装着している。したがって、ロボット10は、RFIDの情報を取得して、その近傍或いは周囲に存在するユーザA、BおよびCを認識する。また、ロボット10は、RFIDの情報を取得した際の電波強度から最近傍に存在するユーザを特定し、当該ユーザに対してコミュニケーション行動を取る。
【効果】 近傍或いは周囲に存在するユーザを個別に認識することができ、特定したユーザに適したコミュニケーション行動を取ることができる。
(もっと読む)
1 - 20 / 30
[ Back to top ]