
Fターム[3C007LV15]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423) | 運転状態の切替 (114)
Fターム[3C007LV15]に分類される特許
1 - 20 / 114
粗倣い制御を行うロボットの制御装置
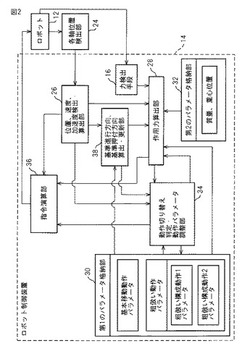
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
組立ロボットとその制御方法

【課題】単一のワークを複数の動作で対象物に組み付ける際に、各動作における条件の変化を考慮して、各動作においてその成功又は失敗を逐次判定することができる組立ロボットとその制御方法を提供する。
【解決手段】単一のワーク1を複数の動作で対象物2に組み付ける組立ロボット10であって、外力を計測する力センサ14を有しワークを把持するロボットハンド12と、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアーム16と、各動作におけるワークの動作条件を記憶しロボットアームを制御するロボット制御装置20とを備える。ロボット制御装置20により、各動作において、ワーク1の位置と計測された外力を動作条件と照合し、各動作の成功又は失敗を判断する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
組立ロボットとその制御方法
【課題】画像センサを用いずに、ワークと中間部材の嵌合状態を判断することができる組立ロボットとその制御方法を提供する。
【解決手段】外力を計測する力センサを有しワークを把持するロボットハンドと(S1)、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアームと、ロボットアームを制御しワークに嵌合された中間部材を対象物に嵌合させる組立作業を実行するロボット制御装置とを備える(S2)。ロボット制御装置により、組立作業中のワークの位置と計測された外力から組立作業の成功又は失敗を判断し(S3)、組立作業が失敗であるときに、ワークを組立作業前の位置へ戻し(S4)、次いで、中間部材が嵌合不能な固定部材5に対して固定部材を仮想的に対象物とみなして組立作業を再実行し(S5)、再実行中のワークの位置と計測された外力からワークと中間部材の嵌合状態を判断する(S6)。
(もっと読む)
ロボット制御装置
【課題】ユーザ座標系を作業領域に応じて自動的に選択する場合、光電センサ等の導入が必要である。またはユーザ座標系の設定に加えて作業領域の複雑な設定が必要である。
【解決手段】アーム先端に取り付けられたツールを操作手段からの操作信号によりジョグ送りする際に、ツールが予め定められた作業領域に侵入したことを検知して、所定の軸方向を有するユーザ座標系を自動的に選択するロボット制御装置である。このロボット制御装置に作業領域自動設定手段を備える。すなわち、ユーザ座標系の原点Orを含んだ所定形状を有する領域を作業領域Qとして自動設定する。所定形状とは、原点Orを中心位置とした予め定めた半径長さDrを有する球体である(c)。または、予め定めた辺長さDx〜Dzを有する直方体である(b)。作業領域Qの中心位置となるユーザ座標系の原点は、シフトできるとさらに良い。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
移載装置
【課題】ワークの移載時間を短縮することが可能な移載装置を提供する。
【解決手段】移載対象となるワーク20を収容する容器11と、予め決められた検出領域に存在するワーク20の位置及び姿勢を検出するセンサ12と、センサ12の検出結果に基づいてワーク20を取り出し、移載先に移載するロボット13とを備え、センサ12は、複数の検出領域を記憶する領域記憶部25と、複数の検出領域をそれぞれ切り替えるための切り替え条件を記憶する条件記憶部26と、切り替え条件を満たした場合に複数の検出領域を予め決められた順番に切り替える制御部27とを有する。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
制御装置
【課題】撮像画像により対象物またはロボットの動作部位を認識することが困難な状況となった場合にも、タスクを継続して実行することができるロボットの制御装置を提供する。
【解決手段】追跡処理手段151は、撮像画像において第1対象物T1またはロボットRの動作部位を検出する第1注視点A1を設定し、第1注視点A1により第1対象物T1またはロボットRの動作部位を追跡する。このとき、追跡処理手段151は、第1注視点A1を喪失した場合に、喪失した第1注視点A1と異なる第2注視点A2に変更するなど、第1対象物T1またはロボットRの動作部位の検出方法を変更する。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
動作制御方法、インタラクティブデバイス及びプログラム
【課題】インタラクティブデバイス及びプログラムにおいて、人に違和感を与えないように、動作を切り替えたり動作を再開する。
【解決手段】任意の動作モジュール11−1〜Nが生成した動作シーケンスに所属する複数のコマンドを、複数の駆動部毎に、且つ、複数のコマンドの開始時刻順に受け付ける手順31と、各駆動部に対するコマンドキューが動作モジュールの単位で格納されたコマンドキュー格納部33−1〜Nから任意の動作モジュールに該当するコマンドキューのコマンドを取り出す手順と、各動作シーケンスを識別する情報と各動作シーケンスの開始時刻の対応付けを含むシーケンス情報36及び各動作モジュールと各動作モジュールの優先度の対応付けを含む動作調停情報32に基づいて取り出したコマンドを実行して該当する駆動部124−1〜Nを制御する手順34をコンピュータに実行させる。
(もっと読む)
案内ロボット、案内方法、及び案内制御用プログラム
【課題】対象を指し示す動作を適切なアームで行うと共に、データ容量の削減を図る。
【解決手段】案内情報の出力に合わせて対象を指し示す動作を含む第1のジェスチャを行うための関節機構の少なくとも回転方向及び回転量を規定するデータであって、第1のアーム部14の軸構成に適合するように構成された第1のジェスチャデータ21を記憶し、位置関係と第1のジェスチャにおけるアーム部の移動方向とに基づいて第1のジェスチャを第1のアーム部14又は第2のアーム部15のどちらで実行するかを決定し、第2のアーム部15が第1のジェスチャを行う場合に第1のジェスチャデータ21を鏡像反転させる。
(もっと読む)
操作入力装置およびマニピュレータシステム
【課題】操作者が操作部を正常に操作できない状態となったときにそれを迅速に検知し、表示物の意図しない動きを防ぐ。
【解決手段】ディスプレイ4と、操作者Bの頭部Cに装着される頭部装着部5と、操作者Bの操作によりディスプレイ4上に表示された表示物2に対する操作信号が入力される操作部6と、頭部装着部5と操作部6との相対位置を検出する相対位置検出手段8,12と、該相対位置検出手段8,12によって検出された相対位置に基づいて、操作部6に入力された操作信号に従って表示物2の動作を制御する第1の制御モードと、操作部6に入力された操作信号に対して制限をかけて表示物2の動作を制御する第2の制御モードとを切り替えて表示物2を制御する制御部7とを備える操作入力装置1を提供する。
(もっと読む)
把持判別装置および把持判別方法
【課題】把持対象である物体が把持可能であるか否かを正確に判定することが可能な把持判別装置を提供する。
【解決手段】本発明の把持判別装置は、把持対象である物体を把持部によって把持した状態で、把持部を移動させる目標軌道を生成する計画部と、目標軌道に基づいて駆動された把持部の動きを計測する観測部と、目標軌道から導出される把持部の目標値および観測部により計測された実測値に基づいて、把持対象である物体が把持可能であるか否かを判別する把持状態判別部と、把持状態判別部による判別結果に基づいて、把持部の把持する物体の把持状態を変更する把持状態変更部と、を備える。
(もっと読む)
ロボットシステム
【課題】ロボット自体に異常がない状態でロボットを停止させた場合に、ロボットをその停止位置から所定の待機位置まで戻す動作を行う際における衝突のリスクを軽減する。
【解決手段】通常動作が行われる際、角度指令生成部27は、各モータMに対する回転角度指令を比較的短い生成周期毎に生成し、その生成した回転角度指令の一部を比較的長い出力周期毎に制御部26に出力する。角度指令記憶部28は、角度指令生成部27が生成した回転角度指令の全てを順次記憶する。遡り動作が行われる際、角度指令生成部27は、角度指令記憶部28に記憶されている回転角度指令を新しいものから古いものへと順に読み出すとともに、それら読み出した回転角度指令を遡り角度指令として出力周期毎に出力する。制御部26は、各軸の回転角度を遡り角度指令に一致させるようにモータMによる各軸の駆動をフィードバック制御する。
(もっと読む)
学習制御ロボット
【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
搬送装置及びその位置決め方法
【課題】センサフィードバックなしに、搬送装置の位置決め精度を高める技術を提供する。
【解決手段】搬送装置100は、自走台車10、自走台車に取り付けられたロボットアーム12、係合器14、及び、コントローラ18を備える。係合器14は、ロボットアーム12の先端に取り付けられている。また、係合器14は、ワークラック90の基準ブロック92と係合するように構成されている。係合器14は、係合すると基準ブロック92との相対位置が正確に定まるように構成されている。コントローラ18は、まず、係合器14が基準ブロック92に届く範囲に自走台車10を移動させる。次いで、自走台車10の車輪を受動回転自在状態としながら、係合器14を基準ブロック92に係合させるように係合器14を制御する。係合器14と基準ブロック92の間に作用する反力によって自走台車10の位置が修正される。
(もっと読む)
加工システム及び加工方法
【課題】加工装置による加工動作の最中やその直前においても、加工装置の位置決め制御の精度を向上させ、ひいては加工装置による加工精度も向上させること。
【解決手段】加工機12が取り付けられたロボット11は、ワーク2の加工対象の目標位置41までの移動動作と、加工対象に対する加工動作とを行う。ロボット移動機構14は、ロボット11を、搬送台車18により搬送されているワーク2と並走するように移動させる。ロボット制御装置17は、同期センサ15の検出結果を用いてロボット移動機構14の移動を制御し、視覚センサ13又は同期センサ15の検出結果を用いてロボット11の位置決め制御を実行する。
(もっと読む)
1 - 20 / 114
[ Back to top ]