
Fターム[3C007LW03]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | 過去のデータを用いるもの (96)
Fターム[3C007LW03]に分類される特許
1 - 20 / 96
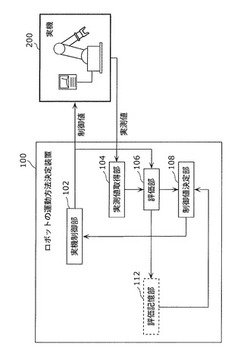
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム

【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
ロボット
【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
ロボットシステム及びロボットの異常検出方法
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、ロボットコントローラ150とを備えており、ロボット100は、アーム103L,103Rに設けられたセンサ122を有し、ロボットコントローラ150は、アーム103L,103Rが異常のない状態で所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記録する規範データ記録部163と、稼働時においてアーム103L,103Rが所定の動作を行う間のセンサ122の出力値Vの時間履歴を出力データとして記録する出力データ記録部167と、規範データ記録部163に記録された規範データと出力データ記録部167に記録された出力データとを比較することにより、アーム103L,103Rの異常の有無を判定する比較判定部164とを有する。
(もっと読む)
ロボットシステム及びロボットの状態判定方法
【課題】ロボットの機能性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122と、センサ122の出力値Vに基づいて、ロボット100が常態であるか非常態であるかを判定する判定部164を備えたロボットコントローラ150とを有している。ロボットコントローラ150は、アーム103L,103Rが常態時に所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記憶する規範データ記録部163を有し、判定部164は、稼働時において、アーム103L,103Rが所定の動作を行う際のセンサ122の出力値Vの出力データと、規範データ記録部163に記録された規範データとを比較することにより、ロボット100が常態であるか非常態であるかを判定する。
(もっと読む)
組立ロボットとその制御方法
【課題】単一のワークを複数の動作で対象物に組み付ける際に、各動作における条件の変化を考慮して、各動作においてその成功又は失敗を逐次判定することができる組立ロボットとその制御方法を提供する。
【解決手段】単一のワーク1を複数の動作で対象物2に組み付ける組立ロボット10であって、外力を計測する力センサ14を有しワークを把持するロボットハンド12と、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアーム16と、各動作におけるワークの動作条件を記憶しロボットアームを制御するロボット制御装置20とを備える。ロボット制御装置20により、各動作において、ワーク1の位置と計測された外力を動作条件と照合し、各動作の成功又は失敗を判断する。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法
【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
ロボット制御方法及びプログラム
【課題】サービスロボットの利用効率を向上すること。
【解決手段】ロボット制御方法において、ロボットの状態遷移の履歴を保持し、制御装置で発生されたロボットに対する割込要求を受け付け、ロボットが割込要求を割込可能の状態にない場合はロボットの状態遷移の履歴に基づいて割込要求に対して推定される割込処理の待ち時間を算出し、前記制御装置に対して待ち時間を提示するように構成する。前記状態遷移の履歴を保持する工程は、前記ロボットの状態遷移の履歴を状態遷移列の形で保持し、前記ロボットが任意の状態から異なる状態に遷移する状態遷移列の出現回数を求める工程を更に含み、前記待ち時間を算出する工程は、前記状態遷移列とその出現回数に基づいて前記待ち時間を算出する。
(もっと読む)
ロボット監視システム
【課題】1つの画像記録ユニットのみを備えるロボット監視システムであっても、画像記録ユニットの故障を検出することを可能とする。
【解決手段】ロボット監視システムは、アーム11を有するロボット10と、アーム11の座標である第1座標を算出するとともに、アーム11の動作を制御するロボットコントローラ20と、ロボット10及びその周辺領域を撮像して画像を記録するカメラ装置30とを備えている。カメラ装置30は、記録される画像に基づいて、アーム11の座標である第2座標を算出し、第1座標と第2座標との比較に基づいて、ロボットコントローラ20及びカメラ装置30のいずれか一方が故障していると判定する。
(もっと読む)
ロボットの位置情報復元装置および位置情報復元方法
【課題】モータ交換等により無効となったセンサ信号による位置情報を容易に有効化する。
【解決手段】モータ駆動により支持部材31に対して回動可能な可動部材32を有するロボット1において、支持部材31と可動部材32との位置関係を表す視覚マーク30を設け、モータ交換の前後において、それぞれカメラ4により視覚マーク30を撮影するとともに、カメラ4からの画像信号に基づいてモータ交換の前後の視覚マーク30の位置関係が同一の位置関係となるようにサーボモータMを制御する。これらモータ制御後のセンサ信号に対応した軸角度θref-n,θref-n’に基づいて、モータ交換後のセンサ信号による軸角度θnを補正する。
(もっと読む)
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
ロボットシステム
【課題】嵌合・挿入作業において、様々な原因に依存する作業良否を正確に判定する。
【解決手段】特徴量抽出部113と特徴量履歴記録部114と作業良否・原因入力部115と作業良否・原因履歴記録部116と特徴量存在範囲算出部117と特徴量存在領域記録部123と作業良否判定部118と作業良否・原因表示部119とを備え、特徴量存在範囲算出部117は特徴量履歴記録部114と作業良否・原因履歴記録部116の2つの履歴データから、作業成功時の特徴量の存在範囲と作業失敗時の特徴量存在範囲を失敗原因ごとに算出して、各特徴量の存在領域を特徴量存在領域記録部123に記録し、当該特徴量存在領域に基づいて、作業良否判定部118は特徴量抽出部113から得られる作業実行時の特徴量がどの特徴量存在領域内にあるかによって作業良否と失敗時の原因を判定し、作業良否・原因表示部119はその判定結果を表示する。
(もっと読む)
ロボット、位置推定方法及びプログラム
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】少なくとも1軸を中心に回転可能なカメラの撮像画像から観測対象と推定される観測対象らしき画像の観測値を画像生成部により計算し、観測対象の位置の過去の推定結果と現在の前記カメラの姿勢に基づいて観測対象らしき画像の予測値を画像予測部により計算し、画像比較部により前記観測値と前記予測値を比較して前記観測値と前記予測値の一致度を尤度として計算し、前記尤度に基づいて前記観測対象の位置を位置推定部により推定するように構成する。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
ロボットシステム
【課題】ロボット自体に異常がない状態でロボットを停止させた場合に、ロボットをその停止位置から所定の待機位置まで戻す動作を行う際における衝突のリスクを軽減する。
【解決手段】通常動作が行われる際、角度指令生成部27は、各モータMに対する回転角度指令を比較的短い生成周期毎に生成し、その生成した回転角度指令の一部を比較的長い出力周期毎に制御部26に出力する。角度指令記憶部28は、角度指令生成部27が生成した回転角度指令の全てを順次記憶する。遡り動作が行われる際、角度指令生成部27は、角度指令記憶部28に記憶されている回転角度指令を新しいものから古いものへと順に読み出すとともに、それら読み出した回転角度指令を遡り角度指令として出力周期毎に出力する。制御部26は、各軸の回転角度を遡り角度指令に一致させるようにモータMによる各軸の駆動をフィードバック制御する。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】通常のティーチング以外の動作を行わずとも、カメラとワークとの位置関係を維持しながら撮像対象物の姿勢を変更できるロボットの制御装置を提供する。
【解決手段】ティーチング時に、ロボットの手先座標である制御履歴とカメラが撮像した画像のデータを対応させて連続的に記憶する(S11〜S16)。姿勢変更指示が与えられるとワークの画像データを移動先画像,その画像の中心を注視点,ロボットの手先座標を移動先座標,制御履歴中で手先のカメラから見て奥行き方向の位置と向きが移動先座標と同じものを移動元座標,移動元座標に対応する履歴画像を移動元画像に夫々設定する。移動元及び移動先座標からワークの注視点移動距離を求め、移動先画像と移動元画像間でのワーク上注視点の画像上の位置ずれを画像注視点移動距離とし、各距離と像面距離から三角測量法で求めた注視点距離を維持したまま与えられた方向及び速度だけワークを回転させる。
(もっと読む)
加工ロボットとその重力補償方法
【課題】工具をワークに押付けながらワークを加工することができ、かつ加工中に工具の姿勢を変えても、力センサの直線性誤差、他軸感度誤差、及び回転工具の回転によるコリオリ力の影響を低減して高精度な加工制御ができる重力補償方法を提供する。
【解決手段】外力を計測する力センサを有しワークを加工する工具と、工具を3次元空間内で位置と姿勢を移動可能なロボットアームと、加工データを記憶しロボットアームを制御するロボット制御装置とを備える。ワークの加工前に、工具とワークとを接触させずに、工具を加工軌道に沿って加工時の送り速度及び姿勢で動作させ、その際の力センサの計測値をオフセット値として記憶する。次いで、ワークの加工時に、加工軌道上の同一の送り速度及び姿勢におけるオフセット値を、加工中の力センサの計測値から差し引いて、加工反力を算出し、この加工反力を用いて、工具の押付力を制御しながらワークに倣って加工する。
(もっと読む)
1 - 20 / 96
[ Back to top ]