
Fターム[3C007MS05]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375)
Fターム[3C007MS05]の下位に属するFターム
危険領域(作動領域)内への異物進入検知 (24)
接触検知又は接近検知を行うもの (94)
干渉の予測 (172)
動作領域の制限 (46)
Fターム[3C007MS05]に分類される特許
1 - 20 / 39
干渉チェック装置及びプログラム
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
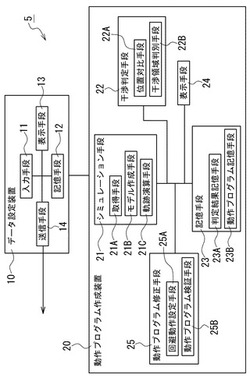
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法

【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
円滑経路生成装置および円滑経路生成方法
【課題】動作経路から余分な動作を削減して円滑な動作経路を再生成する。
【解決手段】動作経路記憶手段と、経路途中点設定手段と、経路途中点記憶手段と、経路途中点のうち対となる一の経路途中点、および他の経路途中点からなる経路途中点対を採択する経路途中点対採択手段と、一の経路途中点と他の経路途中点との中間点を、計算式(一の経路途中点の位置データ+他の経路途中点の位置データ)/2から求める中間点演算手段と、中間点が障害物と干渉するかどうかを判断する中間点干渉チェック手段と、を備え、中間点が障害物と干渉する場合には、現在のままの動作経路を採択し(S7)、干渉しない場合には、当該中間点を新経路途中点として採択し、一の経路途中点から当該新経路途中点を通って他の経路途中点まで進む新動作経路に変更する円滑経路生成ステップを実行(S6)する円滑経路生成装置。
(もっと読む)
経路生成装置および経路生成方法
【課題】C空間における過剰な計算を排除して、動作経路計画工数を低減する。
【解決手段】初期位置記憶手段と、目標位置記憶手段と、現在位置検出手段と、経路記憶手段と、現在位置隣接コンフィギュレーション点を求める第1候補判断手段と、現在位置隣接コンフィギュレーション点のうち障害物との干渉点に隣接する干渉点隣接コンフィギュレーション点を求める第2候補判断手段と、現在位置隣接コンフィギュレーション点が干渉点であるかどうかを判断する干渉チェック手段と、現在位置隣接コンフィギュレーション点のうち現在位置から目標コンフィギュレーション点に近づくようにコンフィギュレーション点を選定する距離候補判断手段と、を備え、現在位置において前記距離候補判断手段により選定された距離候補コンフィギュレーション点が干渉点でない場合には、直進モード経路を生成し、干渉点である場合には境界追従モード経路を生成する。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラム
【課題】自律移動ロボットの移動に障害となる障害物の位置を事前に検出し、自律移動ロボットが目的地まで移動する経路を生成するための移動可能領域を抽出する移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラムを提供する。
【解決手段】予め定められた床面の高さを表す床面判定値に基づいて、移動体と異なる位置で移動体の移動範囲内に設置された距離センサの情報に基づいて算出された観測点の高さの情報に基づいて、移動体が移動できる床面を示す床面観測点を判別する床面判別手段と、距離センサの情報に基づいて算出された観測点の位置の情報に基づいて、予め定められた二次元のグリッドマップに、床面観測点が含まれるか否かを示すフラグをマッピングする床面マッピング手段と、床面観測点が含まれることを示しているグリッドマップの領域に基づいて、移動可能領域を抽出する領域抽出手段と、を備える。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
ロボットおよび制御システム
【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する主目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
ロボットの制御装置
【課題】
作業ツールが作業中にレーザセンサを利用する倣い有効区間と作業ツールが作業中にレーザセンサを利用しない倣い無効区間において、倣い有効区間では位置姿勢制御を行い、倣い無効区間では教示姿勢となるように姿勢制御の切替えができるロボットの制御装置を提供する。
【解決手段】
溶接ロボットの制御装置はワークの形状を認識するレーザセンサを備える。レーザセンサを利用する倣い有効区間では、センサの検出結果に基づく目標位置姿勢に基づいて位置姿勢倣い制御を行うロボット制御部RCを備える。ロボット制御部RCは、倣い有効区間に隣接する前記センサを利用しない倣い無効区間では、倣い無効区間の教示点における教示データに含まれる教示姿勢となるようにロボットの姿勢制御を行うとともに、倣い有効区間の終了点の実位置と、前記目標位置姿勢の位置との差に基づいて位置制御を行う第1位置姿勢制御を行う。
(もっと読む)
ネットワークロボットシステム、ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【構成】 ネットワークロボットシステム10は、ロボット12を含み、ロボット12はサービスの提供に係る移動経路の生成要求の要求メッセージをロボット制御装置102に送信する。ロボット制御装置102は、要求メッセージを受けて、ロボット12同士が衝突しないように、当該要求メッセージについての移動経路を生成する。そして、ロボット制御装置102は、移動経路のうちの一定時間(T秒)分の移動経路についての移動経路データをロボット12に送信する。
【効果】 他のロボットと干渉することなく、確実に移動することができる。
(もっと読む)
加工装置
【課題】工作機械と多関節ロボットを備えるコンパクトな加工装置を提供する。
【解決手段】加工装置100は、工作機械10と、ワークのパレット70と、工作機械10の上部に配設されるガントリーレール120を有する。ガントリーレール120上を走行する多関節ロボット130は、2分離電子系統速度監視機能を備える。この機能を用いて多関節ロボット130の可動範囲D2を工作機械10の前面カバー11の内側に制御して、安全柵180を小型化する。この構成によりオペレータは多関節ロボット稼働中でも工作機械10のドア12を開閉したり、操作盤16を操作することができ、装置の設置スペースも小型化することができる。
(もっと読む)
アームの関節
【課題】低コストで軽量・コンパクトなアームの関節を提供する。
【解決手段】直交する2つの回転軸L1、L2周りに相対回転可能に連結された第1リンク1、第2リンク2と、第1リンク1側の回転軸である2本の差動入力軸5a、5bを独立駆動する駆動手段A、Bと、差動入力軸5a、5bの端部に固定され、駆動手段A、Bの駆動制御信号として、各軸の回転角度情報を計測する回転角度センサ30a、30bとを備えたアームの関節であって、駆動手段A、Bが、回転軸の並進方向と回転方向に移動自在に支持され、かつ所定の位置に弾性的に保持されたウォーム12a、12bと、それと係合する一対のウォームホイール11a、11bとを備え、アームの外部環境への衝突または接触による衝撃力を、弾性的に保持されたウォーム12a、12bの並進移動により吸収緩和し、回転角度センサ30a、30bの出力信号に基づき、衝突を検知する。
(もっと読む)
マニピュレータの姿勢制御装置および姿勢制御方法
【課題】人物などの障害物との衝突が回避できずに衝突した場合であっても、障害物に対する衝突力を低減させることを可能とするマニピュレータの姿勢制御装置を提供する。
【解決手段】マニピュレータ1は、本体部2に回動可能に設けたアーム部3を有している。姿勢制御部10は、マニピュレータ1の本体部2を移動させるときに進行方向Pに対して斜め後方にアーム部3を傾けるように制御する。これにより、アーム部3が傾いた状態で障害物11に衝突するため、障害物11に対して衝突力を分散させることができる。障害物11が人物であれば、正面衝突時に比べて人物に与える衝突力を緩和し痛みを抑えることができる。よって、マニピュレータ1の安全性を高めることができる。
(もっと読む)
ロボット動作計画方法及び装置
【課題】CP制御を行うロボットに関する動作計画方法及び同方法を用いる装置において、冗長性を利用できる範囲内での姿勢変化を解としてメタヒューリスティックス手法を適用して、作業経路の全ての点において障害物を回避できる動作計画を自動作成する。
【解決手段】本発明に係るロボット動作計画方法は、ロボットの自由度が作業に必要な自由度より大きい場合に、エンドエフェクタがワークに設定された作業経路上の複数目標点間を順次補間して動作するためのロボット各軸の速度を分解速度制御法を用いて導出する方法であって、一つの目標点からその次の目標点への動作にて、上記各軸速度の冗長自由度成分が、ロボット上の任意の位置に設定された座標系での上記エンドエフェクタの速度ベクトルを満たす各軸速度成分を含むことを特徴とする。
(もっと読む)
産業用ロボットの出力トルク制限回路
【課題】産業用ロボットにおいて、力センサにて検出されたトルク信号により各関節軸の出力トルクを制限しながらの運転を可能とするとともに、駆動部の効率に左右されない正確な出力トルク制限の解決法を提供する。
【解決手段】各関節軸の姿勢保持トルクを算出する保持トルク演算回路1と、各関節軸の駆動部に取り付けられた力センサ4にて検出されたトルク信号から保持トルク演算回路1にて算出された姿勢保持トルクを減算することにより各関節軸の出力トルクを算出する減算回路5と、この減算回路5にて算出された各関節軸の出力トルクがトルク規制値を超える場合に制御トルクを出力するようにされたヒステリシス回路2と、このヒステリシス回路2から出力された制御トルクに基づいて機械インピーダンス演算により軌道オフセットを算出する仮想機械インピーダンス回路3と、を有するようにした。
(もっと読む)
ロボット制御装置
【課題】収納体から被搬送物を搬出入して交換する時間を短縮させると共にロボットの動作の調整作業を容易にすることができるロボット制御装置を提供する。
【解決手段】制御部14は、前進動作手段により、直線補間のもと、第1ハンド部材28を所定のカセット24に向かって前進するように直進動作させる。同時に、回避動作手段により、前進動作手段による第1ハンド部材28の直進動作に同期させて、第2ハンド部材30をW2軸29を中心に反時計方向回りに回動させる。次に、第1ハンド部材28にカセット24内の半導体ウェハ23を保持させる。次に、後退動作手段により、直線補間のもと、第1ハンド部材28をカセット24から後退するように直進動作させる。同時に、復帰動作手段により、後退動作手段による第1ハンド部材28の直進動作に同期させて、第2ハンド部材30を時計方向回りに回動させる。
(もっと読む)
ロボットアームの衝撃測定方法
【課題】誤動作時にロボットアームRが関節部を駆動する駆動源により正常時より大きなトルクでスイング動作されて他の物に衝突したときの衝撃を複雑な制御を行うことなく低コストで精度良く測定できるようにする。
【解決手段】ロボットアームRをその基端の関節部Raにトルクリミッタ4により制動トルクを付与した状態で保持する。制動トルクは、誤動作時に駆動源により関節部Raに付与されるトルクに等しくする。そして、関節部Raにこの制動トルクより大きなトルクが作用するような速度でロボットアームRに錘体14を衝突させて、加速度センサ等の検出器15により衝撃を測定する。
(もっと読む)
1 - 20 / 39
[ Back to top ]