
Fターム[3C007MS10]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375) | 動作領域の制限 (46)
Fターム[3C007MS10]に分類される特許
1 - 20 / 46
人間協調ロボットシステム
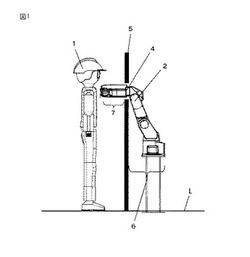
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
ロボットアーム操作システムおよびその操作方法

【課題】ロボットアームの操作に当たり、安全、確実かつ容易に障害物を回避する。
【解決手段】ロボットアーム操作システムは、リアルタイムで受信した操縦指令値に基づいてロボットアーム2を操縦する遠隔操縦部1と、障害物の3次元形状モデルを含む環境データを保存する環境データ保存部4と、障害物との距離が近いほど斥力ベクトルが大きくなるように仮想的な斥力ベクトル場を設定する斥力ベクトル場生成処理部5と、斥力ベクトル場を利用してロボットアームに対して障害物から遠ざかる方向への仮想的な斥力を算出する仮想力生成処理部6と、仮想力生成処理部6により算出された仮想的な斥力と遠隔操縦部1からの操縦指令値とを組み合わせてロボットアームへの動作指令値を生成するロボットコントローラ3と、を有する。
(もっと読む)
ロボットシステム
【課題】ロボット作業の安全性を高めると共に、工場などでの床スペースを有効活用でき、また、設備を簡易化できるようにする。
【解決手段】ロボットのアーム及び手首に備えたワークやツールを含めたアーム占有領域と、アームが接触してはならない仮想安全防護柵と各軸の動作可能範囲をメモリー上に定義し、次回目標位置への動作指令を実行中にロボットを緊急停止した場合のロボット各軸の惰走角度を実際に測定した惰走量などから推定し、次回目標位置に加算することでロボットの惰走予測位置を求め、惰走予測位置におけるアーム占有領域と仮想安全防護柵とが接触しないか、またロボット各軸位置が動作可能範囲内であるかを確認し、異常が確認された場合に、直ちにロボットの動作を停止する制御を行なう という手順で処理する。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
ロボットシステム
【課題】 環境内において、ロボットが通行してよい領域、通行を許さない領域を容易に設定するロボットシステムの構築を課題とする。
【解決手段】
レーザ距離センサを搭載したロボットを用い、通行可能な範囲の境、例えば壁面などに沿ってロボットを移動させる。この移動の際、距離センサによるセンサデータを記録しておき、これを環境の幾何形状を表す地図とマッチングすることで、環境中をロボットが移動したときの軌跡を求める。この軌跡の各点において、センサによる走査を行った場合に、レーザが地図上の障害物と交わる位置を求め、障害物との交わりが軌跡の内側にある場合は進入禁止領域、そうでない場合は通行可能領域と設定する。
(もっと読む)
軌道計画方法、軌道計画システム及びロボット
【課題】計算コストを抑えながら状態空間の探索に制約が生じることのない軌道計画方法及び軌道計画システムを提供する。
【解決手段】物体の状態を状態空間において探索木の根として定め、所定の時間間隔における力学的な関係から時間経過した後の該物体の次の状態を状態空間において探索木の枝として定める探索木作成部101を備える。さらに既知状態登録木を記憶する既知状態登録木記憶部105と、予め区分された状態空間の複数のセルから次の状態が属するセルを定め、該セルに属する状態が既知状態登録木の枝としてすでに登録されているかどうか判断し、登録されている場合に次の状態を破棄し、そうでない場合に次の状態を該既知状態登録木の枝として登録する既知状態登録木作成部103と、を備える。既知状態登録木の枝として登録された状態の中から目標状態までの距離がもっとも小さい状態を選択し、その状態から軌道を求める軌道作成部107を備える。
(もっと読む)
カラーフィルタ基板修正装置
【課題】カラーフィルタ基板にダメージを与えることなく、更に、アーム同士の干渉によるアームの破損を防いで異物欠陥を除去することを可能とするカラーフィルタ基板修正装置を提供する。
【解決手段】異物検査装置によって検出された異物の所在情報に基づいてカラーフィルタ基板に付着した異物を除去するカラーフィルタ基板修正装置であって、カラーフィルタ基板を載置するステージと、異物を撮像する撮像カメラと複数のマイクロマニピュレータとマイクロマニピュレータに備えられその先端で異物を除去する複数のアームとを備えた異物除去ヘッドと、前記異物除去ヘッドを移動する移動手段と、複数のアームを移動する移動手段と、複数のアームとカラーフィルタ基板の接触を防ぐ干渉防止手段その1と、複数のアーム同士の接触を防ぐ干渉防止手段その2と、を有することを特徴とするカラーフィルタ基板修正装置。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30(入力手段)を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、移動制限設定ボタンスイッチB1および回転制限設定ボタンスイッチB2により、軸方向への移動および軸回りの回転の自由度について、1以上の自由度を制限または非制限を設定し、制御装置40により、操作者の複数の設定手段を介した自由度の制限または非制限の設定に応じてマニピュレータを駆動制御する。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】操作者の意図とは異なる方向へのアクチュエータの動作を防ぐことができると共に、作業対象および作業内容の変更が頻繁に起こる場合でも簡単に対応でき、多品種生産に好適なロボット制御装置およびその制御方法を提供する。
【解決手段】操作装置30を介した操作者の操作指示に応じてマニピュレータにおける各軸方向への移動または各軸回りの回転を制御可能なハンドガイドロボット1を制御するロボット制御装置において、ハンドガイドロボット1による一連の作業を複数の作業工程に分割し、該作業工程毎に各軸方向への移動および各軸回りの回転それぞれの自由度について、個別に制限または非制限を制御テーブルとして設定し、制御装置40により、各作業工程毎の制御テーブルに応じてマニピュレータを駆動制御し、操作者からの作業工程切替指示を受け付ける。
(もっと読む)
ロボットの侵入禁止領域算出方法
【課題】ロボットの侵入禁止領域を効率良く求める。
【解決手段】ロボットの動作を擬似的に再現する空間領域のうち、他のロボットの侵入を禁止する侵入禁止領域を算出するロボットの侵入禁止領域算出方法であって、前記空間領域を段階的に細かく分割して、複数の空間ブロックを形成するとともに、前記ロボットの動作を含まない前記空間ブロックを演算の対象から除外し、演算対象領域を絞り込みながら、前記侵入禁止領域を算出する算出ステップを含む。
(もっと読む)
人間とロボットとの協調動作領域を有する生産システム
【課題】人間の安全を確保しながら、人間とロボットが同じ作業空間で同時に作業を行う協調動作を可能とする。
【解決手段】作業机6を挟んで一方の側にロボット2が配置され、反対側に作業員1が位置しており、作業員1の手が届く範囲は、作業机6のために制限されている。その結果、作業机6上は、作業員1のみが動作可能な人間動作領域3、ロボット2のみが動作可能なロボット動作領域4、およびそれらの間で作業員1とロボット2が共に動作可能な協調動作領域5に分かれている。ロボット2の制御手段は、協調動作領域内5では、ロボット2の構成部分の最高速度を協調動作領域5外におけるよりも低速に制限し、かつ、協調動作領域5内で作業机6や部材10などの周辺部材から所定の距離内のロボット進入禁止領域8にロボットの構成部分が進入しないようにロボット2の動作を制御する協調動作モードを有している。
(もっと読む)
移動体軌道生成方法および移動体軌道生成装置
【課題】移動体の動作軌道の自動生成方法として従来ポテンシャル法が用いられていたが、ローカルミニマムによって軌道生成不能となることがあった。
【解決手段】作業空間に障害物と移動体の初期位置と目標位置とを結ぶ動作軌道モデルを設定する。さらに、作業空間中に障害物を発生源とする斥力ベクトル場を設定する。この斥力ベクトル場を、動作軌道モデルを構成する質点に作用させて動作軌道モデルを変形させることにより、移動体の動作軌道を生成する。
(もっと読む)
安全カバー
【課題】作業者の安全を確保することが可能で、かつ、産業用ロボットが衝突してもその損傷を防止することが可能な産業用ロボットの安全カバーを提供すること。
【解決手段】産業用ロボットの作業領域の少なくとも一部を形成する安全カバーは、作業領域からはみ出す産業用ロボットのハンドまたはアームが衝突する樹脂製かつ板状のカバー部材21と、カバー部材21の外周側が係合する係合手段22cが形成されカバー部材21を保持する枠部材22と、カバー部材21の少なくとも一部が係合手段22cから外れたときに枠部材22からカバー部材21が脱落するのを防止するための脱落防止手段35とを備えている。
(もっと読む)
安全なアクセスを組み合わせたパレット輸送装置
【課題】小型の装置であってパッケージ機械とパレタイザとを一体化した装置を改良すること。
【解決手段】装置は、上記パレット輸送ステーションへのアクセスを提供するドア(7)が設けられた同一の筐体(1)内に配置されており、製品(8)をパッケージする機械(2)と、ロボット式のパレット輸送ステーションと、で構成されている。この装置は、ロボットのグリップヘッド(7)の移動を制限空間内に集めるために、上記閉鎖した筐体1)内における上記ロボット(15)の運動範囲を制限する手段を備え、制限空間は、筐体(1)内であってドア(7)の近傍に位置する無形バリアから測定された最小距離に応じて規定された安全空間と重ならない。ロボット(15)の運動範囲を制限するこれら手段は、電動タイプのカムであって当該カムが上記ロボットの操縦制御部の制御下で上記ロボット(15)のロボットの主軸no.1回りにおける運動範囲を制御し、また、ロボットの運動速度を低減する。
(もっと読む)
スカラ型ロボット装置の干渉防止方法および干渉防止用装置
【課題】 従来装置に在ったタイムラグ等によりデッドロック状態の発生等も見られた干渉防止装置の欠点が取り除いた複数個のスカラ型ロボットを使用してワークを加工する装置を提供する。
【解決手段】 作業領域を共有する複数個のスカラ型ロボットを並べて作業する装置の干渉防止方法において、現在加工中のワークと次のワークとの間隔を決定し、加工中のワーク上に境界線を決定するとともに、この境界線の前後に夫々隣り合うロボットハンドの作動範囲決定し、さらに隣のロボットのハンドに届かぬ位置にロボットアームの動作を選択的に止める機械的ストッパを設けてなる複数個のスカラ型ロボットを並べて作業する装置の干渉防止方法とした。
(もっと読む)
ロボットのアーム回動範囲変更制御装置
【課題】ソフト制御上の可動制御範囲区域に対して物理ストッパの可動範囲区域を間違えて設定してしまうことを抑制でき、さらに、複数の可動制御範囲区域をアームの所定可動範囲内に確実に設定できるようにする。
【解決手段】ユーザーが複数の可動制御範囲区域のいずれかを設定すると、制御部9は、該可動制御範囲区域に対応する前記可動範囲区域において設定された2つの物理ストッパ中間角度値Kc[deg]を求め、物理被ストッパの現在位置の角度値をX[deg]とし、アームの移動角度をQ[deg]としたとき、QをQ=Kc−Xなる式で求め、Q>0のときには、アームを、他方の回転方向へ前記Qの角度だけ回転させ、Q<0のときには、アームを、一方の回転方向へ前記Qの角度だけ回転させることによりストッパ位置の示唆を行う。
(もっと読む)
加工装置
【課題】工作機械と多関節ロボットを備えるコンパクトな加工装置を提供する。
【解決手段】加工装置100は、工作機械10と、ワークのパレット70と、工作機械10の上部に配設されるガントリーレール120を有する。ガントリーレール120上を走行する多関節ロボット130は、2分離電子系統速度監視機能を備える。この機能を用いて多関節ロボット130の可動範囲D2を工作機械10の前面カバー11の内側に制御して、安全柵180を小型化する。この構成によりオペレータは多関節ロボット稼働中でも工作機械10のドア12を開閉したり、操作盤16を操作することができ、装置の設置スペースも小型化することができる。
(もっと読む)
ロボットの干渉回避方法及びロボットシステム
【課題】ロボットと障害物との干渉を確実に回避しつつ、所定の作業を確実に行う。
【解決手段】この干渉回避方法は、開始位置での干渉チェックを行うステップと、干渉があればロボット2が存在すべき領域を決定するステップと、ロボット2の各部位を代表する対象点がロボット2の存在すべき領域内にあるかをチェックするステップと、領域の内側にある部分は、領域の境界から離れかつ境界に近いほど大きい移動ベクトルを与え、外側にある部分は、領域内に向かいかつ領域内にある時よりも大きい移動ベクトルをそれぞれ与えるステップと、移動ベクトルを合成した合成ベクトルを用いてロボット2の回避位置・姿勢を求めるステップとを繰返し行い、干渉しない経路を設定する。
(もっと読む)
三次元自動領域によるマルチアームロボットシステムの干渉検査
【課題】衝突回避制御システムにおいて、三次元およびリアルタイムの衝突検出、ロボット運動の前もったロボットシステムへの通信、衝突しないプログラム軌道の条件および重要な工程経路の保護を提供する。
【解決手段】本発明によるシステムは一連の命令を含み、その一連の命令は干渉検査自動領域方法を行うために、一連の命令を実行するコントローラに格納されている。干渉検査自動領域方法は、第一のプログラム経路に沿った第一ロボットの動作時に占有される、共通空間の第一の部分を決定する工程と、第二のプログラム経路に沿った第二ロボットの動作時に占有される、共通空間の第二の部分を決定する工程と、第一の部分および第二の部分の間に重複部分が存在するか否か決定するために、第一の部分および第二の部分を比較する工程と、重複部分の存在に対応して第一ロボットおよび第二ロボットを動作させる工程とを含む。
(もっと読む)
倒立走行ロボット及びその制御方法
【課題】障害物の近傍で着地状態から倒立状態へ移行する際に、障害物への接触・衝突を回避することができる倒立走行ロボットを提供すること。
【解決手段】本発明の一態様に係る倒立走行ロボットは、駆動軸C1、C2回りに回転する車輪31、32と接地部材33とが床面に接した着地状態から、車輪31、32が床面に接し接地部材33が床面から離れる倒立状態とする際に、倒立走行ロボット1の周囲の障害物から可動台11を遠ざける方向に移動させるように可動台駆動部を制御し、前後方向における車体部10の重心位置を、駆動軸C1、C2よりも障害物から遠ざけるようにする。
(もっと読む)
1 - 20 / 46
[ Back to top ]