
Fターム[3C007MT02]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 制御、動作の高速化 (87)
Fターム[3C007MT02]に分類される特許
1 - 20 / 87
ロボットの制御方法およびロボットの制御装置
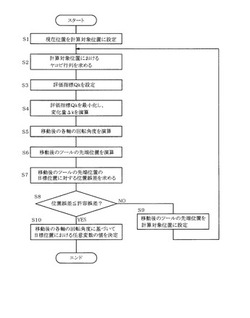
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
ロボットシステムおよびロボット組立システム
【課題】
三次元計測装置を用いて複数種類の部品を把持するのに適したロボットシステムを提供する。
【解決手段】
所定の計測領域の三次元情報を計測する三次元計測装置と、前記三次元情報から対象物の位置姿勢を求める位置姿勢認識装置と、鉛直な第1軸を旋回軸として固定ベースに水平旋回可能に取り付けられた旋回ヘッドによりアームを水平旋回させ、アームの先端に取り付けられた前記対象物を把持するツールの先端の動作領域が前記第1軸を回転軸とする回転体領域である垂直多関節ロボットと、から構成されるロボットシステムであって、動作領域内に第1軸を中心とした一定の角度ごとに複数の作業領域を設定し、ツールが一の作業領域に存在する場合に、前記計測領域が他の作業領域を包含する位置にて前記三次元計測装置の計測部を前記旋回ヘッドに固定する。
(もっと読む)
センサ装置及びロボット装置
【課題】検出部から出力される原検出信号から可撓体の振動に起因するノイズ成分を良好に除去し、フィルタ処理により得られる検出信号の位相の遅れを抑制する。
【解決手段】検出部101は、被測定対象の状態により変形する可撓体と、可撓体の変形量を検出し、検出結果を示す原検出信号102を出力するセンサとを有する。フィルタ部103は、フィルタ係数を用いて原検出信号102をフィルタ処理して得られる検出信号107を出力する。演算装置104は、原検出信号102に含まれる可撓体の振動数を演算により求める。変更部106は、フィルタ部103のフィルタ係数を変更して、フィルタ部103を、演算装置104により演算された振動数fを減衰させるフィルタとして機能させる。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
【課題】 互いに重なり合わないように置かれた複数の物品が完全には分離されていない場合であっても、3次元情報を再取得することなく多関節ロボットを用いて取り出す。
【解決手段】 互いに重なり合わないように置かれた複数の物品をそれぞれ認識して位置および姿勢を算出する認識処理部と、複数の物品からなる第1物品群の重心の水平位置を第1重心位置として算出し、第1物品群のうち第1重心位置から最も離れた物品を取り出し対象の物品として選択する選択部と、第1物品群のうち取り出し対象の物品を中心とする領域に含まれる物品からなる第2物品群の重心の水平位置を第2重心位置として算出し、第2重心位置から取り出し対象の物品の重心の水平位置に向かう方向を水平移動方向として算出する移動方向算出部と、取り出し対象の物品を水平移動方向に所定移動量だけ移動させてから垂直方向に取り出すように多関節ロボットを制御する制御部と、を有する。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの運動中に、複数の必要条件を満足させることが可能となる各脚体の先端部の運動軌道を効率よく決定しつつ、前記複数の必要条件を満足させる目標歩容を生成する。
【解決手段】脚式移動ロボット1の脚体2のうちの遊脚の先端部(足平22)の目標着地位置の第1着地許容領域と第2着地許容領域とを決定し、これらの着地許容領域が重なり合う領域に目標着地位置を決定し、ロボットの目標歩容を生成する。第1着地許容領域は、幾何学的脚体運動必要条件を満足するように決定される。第2着地許容領域は、床反力の構成要素である所定の床反力要素に係わる運動系属性必要条件と床反力要素許容範囲条件とを満足させ得るように決定される。
(もっと読む)
制御装置
【課題】タスクの実行開始を早めることができ、かつ、ロボットの動作が不連続性となることを防止することができるロボットの制御装置を提供する。
【解決手段】将来外界予測部130によりタスクの各実行段階における対象物の予測位置および予測姿勢を予め予測しておき、少なくともロボットRにより次に実行される実行段階におけるロボットRの目標軌道を生成しておく。
(もっと読む)
パラレルリンクロボットの動作方法
【課題】パラレルリンクロボットの駆動モータには、常に過大な負荷が繰返しかかることが多い。更に高速な動作や、過大な負荷をかける必要があるときには、一般には、より大型で高出力なモータを採用するか、減速機等をもちいて、トルクを増大する方法を採択することになる。しかしながら前記従来の技術では、パラレルリンクロボット自体の構成が、高出力化、大型化するために、コストアップを伴うという課題がある。
【解決手段】本発明のパラレルリンクロボット21は、移動開始点と移動終了点座標情報から、適切な移動姿勢を演算する機能を有し、移動開始前もしくは、移動中に、駆動負荷が軽減する姿勢をとり、移動を行うことを可能とする。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
冗長ロボットの関節目標値決定方法及び冗長ロボットの制御装置
【課題】関節数がn、先端目標値ベクトルXの次数がm(n>m)である冗長ロボットの関節目標値ベクトルθを少ない計算負荷で決定する。
【解決手段】ベクトルXを複数の部分ベクトルに分割する。各部分ベクトルに優先度を付与する。各部分ベクトルとベクトルθの間の線形関係式を求める。一の優先度kを選択し、「選択された優先度kよりも高い優先度を有する全ての部分ベクトルが線形関係式と不等式関係式の拘束条件の下で実行可能である領域が存在するか否か」を判定する(S14、S15)。その処理を異なる優先度の部分ベクトルに対して実行し、上記領域が存在すると判定された部分ベクトルのうち最も低い優先度を有する部分ベクトルについて、上記拘束条件の下で目的関数C2を最小にする凸二次計画法の解を求める(S21)。求めた解をロボットベクトルθとして決定する(S22)。
(もっと読む)
移動装置の軌道情報生成装置
【課題】所望の始点から終点までの移動時間の短縮と移動によって生ずる振動の低減とを両立した軌道情報を生成する新たな軌道情報生成装置を提供する。
【解決手段】軌道情報生成装置2は、所望の始点から終点まで移動装置103を移動させるための軌道及び軌道上の速度に関する軌道情報132を生成するにあたり、予め設定された移動装置の振動特性を用いて移動により生ずる模擬振動の大きさ(θ3−θa)を算出し、算出した模擬振動の大きさ(θ3−θa)をパラメータの一つとし、始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして、少なくともこれら2つのパラメータを含む評価関数の値が最小となるように最適化手法を用いて軌道情報を生成する。
(もっと読む)
ワークの自動積載方法及びその装置
【課題】サイクルタイムを短縮することができるワークの自動積載方法及びその装置を提供する。
【解決手段】先ず、初期位置からロボットヘッド20を第1プレートW1の上方に移動し、ロボットヘッド20に設けられた第1把持部42、42にて第1プレートW1を把持する。そして、ロボットヘッド20を第2プレートW2の上方に移動し、ロボットヘッド20に設けられた第2把持部54、54にて第2プレートW2を把持する。その後、第1プレートW1及び第2プレートW2を把持した状態でロボットヘッド20をトレー104に形成された凹部106の上方に移動し、第1プレートW1及び第2プレートW2の把持を解放することにより、第1プレートW1及び第2プレートW2を積載する。
(もっと読む)
1 - 20 / 87
[ Back to top ]