
Fターム[3C007MT03]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 構造の単純化 (27)
Fターム[3C007MT03]に分類される特許
1 - 20 / 27
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
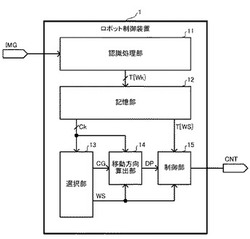
【課題】 互いに重なり合わないように置かれた複数の物品が完全には分離されていない場合であっても、3次元情報を再取得することなく多関節ロボットを用いて取り出す。
【解決手段】 互いに重なり合わないように置かれた複数の物品をそれぞれ認識して位置および姿勢を算出する認識処理部と、複数の物品からなる第1物品群の重心の水平位置を第1重心位置として算出し、第1物品群のうち第1重心位置から最も離れた物品を取り出し対象の物品として選択する選択部と、第1物品群のうち取り出し対象の物品を中心とする領域に含まれる物品からなる第2物品群の重心の水平位置を第2重心位置として算出し、第2重心位置から取り出し対象の物品の重心の水平位置に向かう方向を水平移動方向として算出する移動方向算出部と、取り出し対象の物品を水平移動方向に所定移動量だけ移動させてから垂直方向に取り出すように多関節ロボットを制御する制御部と、を有する。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット

【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
視覚センサのマウント装置と方法
【課題】視覚センサの正確な位置と姿勢が不明である場合、或いはその位置又は姿勢が変化している場合でも、視覚センサをロボットのハンドに正確にマウントすることができる視覚センサのマウント装置と方法を提供する。
【解決手段】ロボット座標系ΣRにおいてハンド11を3次元移動可能なロボット2と、視覚センサ座標系ΣSにおいてハンドの位置と姿勢を非接触で検出可能な視覚センサ14とを備える。ロボット座標系において視覚センサ14の検出範囲内にハンド11を移動して(S1)、視覚センサ14により視覚センサ座標系におけるハンド11の位置と姿勢を非接触で検出し(S2)、この検出結果からハンド11と視覚センサ14の相対位置関係を算出し(S3)、測定した相対位置関係からロボット座標系ΣRにおける視覚センサ14の位置と姿勢を算出し(S4)、ロボット座標系においてハンド11を移動してハンドに視覚センサ14をマウントする(S5)。
(もっと読む)
案内ロボット、案内方法、及び案内制御用プログラム
【課題】対象を指し示す動作を適切なアームで行うと共に、データ容量の削減を図る。
【解決手段】案内情報の出力に合わせて対象を指し示す動作を含む第1のジェスチャを行うための関節機構の少なくとも回転方向及び回転量を規定するデータであって、第1のアーム部14の軸構成に適合するように構成された第1のジェスチャデータ21を記憶し、位置関係と第1のジェスチャにおけるアーム部の移動方向とに基づいて第1のジェスチャを第1のアーム部14又は第2のアーム部15のどちらで実行するかを決定し、第2のアーム部15が第1のジェスチャを行う場合に第1のジェスチャデータ21を鏡像反転させる。
(もっと読む)
環境認識ロボット
【課題】環境認識動作の処理負荷を軽減させることができる環境認識ロボットを提供すること。
【解決手段】本発明にかかる環境認識ロボットは、ロボット本体11、センサ12、処理部13を備える。センサ12は、ロボット本体11に搭載され、周囲の物体に照射したレーザ光20の反射光を受光することにより検出される当該物体までの距離情報を含む測定データを生成する。処理部13は、測定データに基づいて、周囲の物体を認識する。アーム112には、センサ12から照射されたレーザ光20に対する反射光の強度が、センサ12が検出可能な強度以下となる反射部材が設けられている。
(もっと読む)
ロボットシステム
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
マスタスレーブシステム及びその制御方法
【課題】比較的小出力のマスタロボットを操作者が操ることによって、少なくとも電気的に接続された比較的大出力のスレーブロボットを操縦するマスタスレーブシステムにおいて、操作者に、まるでスレーブロボットを直接持っているかのような直感的な操縦を可能とせしめ、なおかつスレーブロボット側に力センサを必要としないマスタスレーブシステムの提供。
【解決手段】バイラテラル制御されるマスタスレーブシステムであって、マスタロボットをアドミッタンス型の力覚提示装置とし、マスタロボットの変位を検出するマスタ変位センサと、スレーブロボットの変位を検出するスレーブ変位センサと、マスタロボットを駆動するマスタアクチュエータと、スレーブロボットを駆動するスレーブアクチュエータと、操作者がマスタロボットに加える操作力を検出する操作力センサと、からなるものとする。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び姿勢のずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置及びロボット装置の制御方法を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、閉じたときに錘形状となる把持ツメを手先に有するマニピュレータ1の手先を作業台上に設けられた位置基準部7に当接させることによって、位置合わせのための教示動作を行う。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
ロボットシステム
【課題】従来ロボットコントローラでは対応していなかった安全PLCをロボットコントローラ内部に設置するとともに、複雑な配線経路をとることのない省配線化、安全性、信頼性を高いレベルで達成する。
【解決手段】コントローラ200は、ロボット100の制御指令を処理するロボットコントローラ制御基板210と、ロボット本体の非常停止を制御する安全PLC220と、サーボ電源遮断用リレーの溶着を検知する溶着検知手段230と、から構成され、安全PLCには、教示操作端末400からの安全に関する信号(前記モード切替スイッチ、前記サーボオンスイッチ、前記非常停止スイッチ及び前記イネーブルスイッチからの信号)が直接入力されることを特徴とする。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】簡易な構成で容易にロボットを制御するロボット制御装置を得ること。
【解決手段】データを入出力するI/Oエリア内での位置であるI/O番号3Aと、このI/O番号3Aの位置に書き込まれるデータ4Aと、によって定義された指示情報30Aを、所定のプログラム言語で動作するPLC1から受信すると、指示情報30A内の、I/O番号3Aとデータ4Aに基づいて指示情報30Aに応じた動作をロボット5に行なわせるロボットCPU21を有する。
(もっと読む)
多関節ロボットシステム、多関節ロボット、力測定モジュール、力測定方法およびプログラム
【課題】 多関節ロボットのリンクおよび関節に作用する力やモーメントを測定すること。
【解決手段】 本発明の多関節ロボットは、関節部に設けられ、駆動力発生側の駆動軸および駆動力出力先のリンク174側の出力軸176それぞれに、軸心から離間した箇所で固定され、該箇所に作用する偶力に応じて弾性的に曲げ歪みを発生する歪み発生部材190と、歪み発生部材190に接して配置され、曲げ歪みを検出する歪みセンサとを含む。測定制御手段は、関節部の軸まわりに発生する負荷トルクを歪みセンサの出力値から算出し、仮想仕事の原理に従って関節部の負荷トルクからリンクに作用する力に換算する演算手段を含む。
(もっと読む)
筋骨格系機構システム
【課題】本発明は、スレーブロボット(筋骨格系機構部)に力センサを備えることなく、前記筋骨格系機構部に架かる荷重を操作者に知覚させ得る筋骨格系機構システムを提供する。
【解決手段】本発明の筋骨格系機構システムSは、生体の所定の運動に関与する筋肉の活動電位による筋電信号を測定する筋電信号測定部1と、1つの姿勢に対して複数の硬さを持つことができ、前記所定の運動を行うように前記生体の部位を模した機構である筋骨格系機構部3と、筋電信号測定部1で測定された筋電信号に基づいて筋骨格系機構部3の動作を制御する制御信号を生成する制御信号生成部21と、筋骨格系機構部3の姿勢が変化した場合に、前記姿勢の変化量を表す情報を出力する変化量情報出力部4とを備える。
(もっと読む)
手術用マニピュレータ及び手術用マニピュレータシステム
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】交流電源ACからロボット本体1側にはコンタクタ5を介して給電し、コントローラ20側には直接整流回路10に給電している。コントローラ20は、コントローラCPU9、スイッチングIC16、遅延回路37、電源スイッチ20aなどから構成される。電源スイッチ20aがオンされると、コントローラCPU9が給電されてコンタクタ5をオンさせ、ロボット本体1を駆動制御する。電源スイッチ20aがオフされると、コントローラCPU9はロボット本体1の停止動作を行い、コンタクタ5をオフさせ、遅延時間をおいてトランジスタ35がオフされると、自身の給電が停止する。
(もっと読む)
ロボット制御装置
【課題】本発明は、省スペース化するとともに、装置内部の放熱の問題を解決できるロボット制御装置を提供する。
【解決手段】複数台ロボットを1台のコントローラで制御するロボット制御装置であって、複数台のロボット駆動装置部21〜26の上部に共通制御回路27を備えたものである。
(もっと読む)
ロボット応用プログラム実行装置及び方法
【課題】ロボット応用プログラムの移植性を向上させ、ロボット応用プログラムの性能が強化されるように、ロボット応用をなす各モジュールをプラグインで構成し、必要時に動的に搭載するロボット応用プログラム実行装置及び方法を提供する。
【解決手段】本発明のロボット応用プログラム実行装置は、ロボット応用を実行するための動的ライブラリを支援する運営体制が搭載されたロボット応用実行装置と、各種センサ及びエフェクタを有しているロボット装置部と、前記動的ライブラリを構成するプラグインを格納するプラグイン格納部と、前記ロボット応用プログラムを格納するためのロボット応用プログラム格納部とを含む。
(もっと読む)
多関節マニピュレータの先端位置制御方法および多関節マニピュレータ
【課題】多関節マニピュレータの先端を所定の位置に精度よく位置制御することのできる多関節マニピュレータの先端位置制御方法を提供する。
【解決手段】軸回りに回転する複数の関節軸2,4と、これらの関節軸2,4からその径方向に延伸する複数のアーム1,3とを備えた多関節マニピュレータ5の先端を位置制御する方法であって、アーム1,3の各先端部に装着されたジャイロセンサ9,10の出力から関節軸2,4の回転角度と回転速度を求めて多関節マニピュレータ5の先端を位置制御するようにした。
(もっと読む)
ロボット装置及びロボット装置教示方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び傾きのずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、マニピュレータ1の所定箇所を作業台102上に設けられた位置基準部7に当接させ合致させることによって、位置合わせのための教示動作を行う。
(もっと読む)
1 - 20 / 27
[ Back to top ]