
Fターム[3C007MT05]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 振動防止、安定性 (83)
Fターム[3C007MT05]に分類される特許
1 - 20 / 83
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
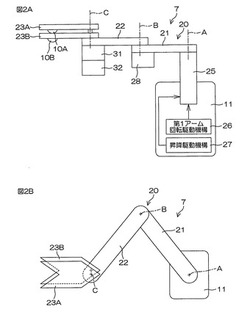
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
作業腕の振動抑制方法

【課題】簡易設置型ロボット等が具える低剛性の作業腕の振動を加速度の変化が穏やかな制御によって充分に抑制する方法を提供することにある。
【解決手段】作業腕の基部を駆動して先端部を移動させるとともに、その先端部の移動中および停止後の振動を抑制するに際し、前記基部の駆動を、sin関数を用いて速度を連続的に変化させる速度パターンで行うことを特徴とする作業腕の振動抑制方法である。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
ロボット及びロボットのノイズ除去方法
【課題】慣性センサーを用いたフィードバック系において、発振してしないロボットを提供する。
【解決手段】アーム101と、アームを回動させるモーター103とトルク伝達機構102とを含むアーム連結部104と、アーム101の端部のアーム連結部104に連結された基体105と、モーター103の回動角度を検出しモーター103の回動角度情報を出力する角度センサー106と、アーム101に作用する慣性力の情報を出力する慣性センサー107と、アーム101の回動動作を制御する制御部108と、角度センサー106の出力と慣性センサー107の出力とから慣性センサー107のノイズ周波数を検出するノイズ検出部109と、ノイズ検出部109の情報からフィルター111の特性を決めるフィルター定数決定部110と、フィルター定数決定部110に基づき慣性センサー107のノイズを除去するフィルター111とを備える。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
ロボットの動作制御装置及びプログラム
【課題】ロボットに外力が作用したときに、状況に拘らずロボットの衝撃吸収性能を良好に保持できるとともに、ロボットの動作遅れによる振動の発生を抑制する。
【解決手段】本発明の動作制御装置12では、変位量xを時間tで分数階微分(微分階数r)し、定数Pを乗じた値が、ロボット10に作用した外力に等しくなる関係を維持するように、ロボットアーム11の動作を制御する処理がなされる。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】アクチュエーターの角度センサーの回転角度検出データより、前記角度センサーを備える前記アクチュエーターによって動作する前記アームの角速度を演算する第1演算部と、前記第1演算部の演算対象の前記アクチュエーターを含む連結装置を介して連結される前記アームに備える慣性センサーの角速度検出データより、前記連結装置を軸とする前記アームの角速度を演算する第2演算部と、低周波成分を除去した、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部とを備えるロボット装置。
(もっと読む)
多関節型ロボットの速度指令プロファイルの生成方法
【課題】カットオフ周波数の高いローパスフィルタを適用したときに停止振動を低減するためには、カットオフ周波数の低いローパスフィルタを適用したときと同等の減速時間を持たせられるような加減速特性を実現し、停止振動が発生し難い長い減速時間を持った速度指令プロファイルを生成する必要がある。
【解決手段】プログラムで指定された動作速度によらず加速度が常に一定となる手法により生成した速度指令プロファイルにカットオフ周波数の低いローパスフィルタを適用したときの減速時間と、前記速度指令プロファイルに前記ローパスフィルタよりもカットオフ周波数が高いローパスフィルタを適用したときの減速時間とが、同等になるようにして求められた加減速特性を用いて生成した速度指令プロファイルに、前記カットオフ周波数の高いローパスフィルタを適用したときの速度指令プロファイルを求める。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
学習制御機能を備えたロボット
【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
移動装置の軌道情報生成装置
【課題】所望の始点から終点までの移動時間の短縮と移動によって生ずる振動の低減とを両立した軌道情報を生成する新たな軌道情報生成装置を提供する。
【解決手段】軌道情報生成装置2は、所望の始点から終点まで移動装置103を移動させるための軌道及び軌道上の速度に関する軌道情報132を生成するにあたり、予め設定された移動装置の振動特性を用いて移動により生ずる模擬振動の大きさ(θ3−θa)を算出し、算出した模擬振動の大きさ(θ3−θa)をパラメータの一つとし、始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして、少なくともこれら2つのパラメータを含む評価関数の値が最小となるように最適化手法を用いて軌道情報を生成する。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
ロボットの制御装置
【課題】関節とこれを駆動するアクチュエータとの間の動力伝達系にばね部材を備えた移動ロボットのふらつきを防止しつつ、該移動ロボットの所望の動作を安定に行なうことを可能とする。
【解決手段】移動ロボット1の運動状態量目標値は、移動ロボット1全体の並進運動量の1階微分値の鉛直方向成分の目標値を少なくとも含み、この目標値は、移動ロボット1の全体重心点の鉛直方向の位置の観測値をフィードバック制御則により所定の目標値に収束させるように状態量目標値決定部84で決定される。制御入力決定部85は、運動状態量目標値を用いて逆動力学演算の処理を実行することにより、各関節の目標駆動力を決定する。この目標駆動力に応じてアクチュエータ50の動作が制御される。
(もっと読む)
基板搬送用装置
【課題】 基板保護、装置保護のための基板有無検出、および衝突検出を小型、低コストな1つのセンサにて精度よく検出し、基板の大型化に対する鉛直方向の振動についても同時に低減できる基板搬送用装置を提供する。
【解決手段】 エンドエフェクタに取り付けたひずみセンサと、ひずみセンサ出力から基板有無を検出する基板有無検出部と、衝突有無を検出する衝突有無検出部と、鉛直方向の振動を低減する振動低減部を備える。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じる、少なくとも1自由度かつ時変の振動を抑制する振動抑制方法を提供する。
【解決手段】加速または減速運動に伴って運動体に生じる、少なくとも1自由度かつ時変の振動を、インプットシェイピング法を用いて抑制する場合に、運動体の姿勢変化に伴って生じるコリオリの力がする仕事を考慮して、第2のインパルス入力の大きさを決定しているため、時間によって第1のインパルス応答の振幅が変化する時変の振動系に対して、第2のインパルス応答を重ね合わせることで効果的に振動を抑制することができる。
(もっと読む)
軌跡制御装置
【課題】コーナ形状のように指令経路の方向が急峻に変化するような場合でも駆動系に過大な負荷や振動を生じさせずに、また制御系の安定性を損なうことなく軌跡誤差を抑制すること。
【解決手段】複数の可動軸のモータを同時制御することにより可動部の軌跡を制御する軌跡制御装置10において、サーボ系応答軌跡を演算するサーボ系応答軌跡算出部1と、誤差ベクトルを演算する誤差ベクトル算出部2と、誤差ベクトルとサーボ系応答軌跡の所定の参照点における移動方向に基づいて補正ベクトルを演算する補正ベクトル演算部3と、補正ベクトルを各軸に分配して各可動軸の補正量を演算する各軸補正量演算部4と、各可動軸の補正量を対応する軸の位置指令に加算する補正量加算部5、6と、各可動軸の位置がそれぞれの軸の補正後位置指令に追従するように各軸のモータ駆動トルクを出力することによりそれぞれの軸のモータを制御するサーボ制御部7、8を備えた。
(もっと読む)
ロボットの制振方法およびロボットの制御装置
【課題】ロボットの先端の振動を抑制する。
【解決手段】複数のリンク24〜34と対応するリンクを駆動する複数のモータ36〜46とを有するロボットの動作が停止するときに発生するロボット先端の振動を抑制するロボットの制振方法であって、ロボット先端の加速度を加速度センサ52によって検出し、加速度センサが検出した加速度に基づいてロボット先端の速度を算出する。ロボット先端の速度と、加速度センサの加速度検出タイミングにおける複数のモータの回転角度と、ヤコビ行列Jの逆行列J−1とに基づいて、各リンクと対応するモータとの間のねじれ角速度を算出する。さらに、ねじれ角速度に基づいてねじれ角度を算出し、ねじれ角速度とねじれ角度とに基づいて、各リンクと対応するモータとの間に発生したねじれが解消する、各モータの制御入力に加算する補償量を算出し、補償量を加算した制御入力を各モータに出力する。
(もっと読む)
ロボットの制御装置
【課題】ロボットのリンクの振動を十分に抑制する。
【解決手段】複数のリンクと、対応するリンクを駆動する複数のモータとを有するロボットの制御装置であって、対応するモータの回転角度または回転角速度を検出する複数のセンサと、各リンクと対応するモータとの間のバネ要素それぞれについて、そのねじれ角度およびねじれ角速度を、複数のモータそれぞれへの制御入力と複数のセンサそれぞれが検出した回転角度または回転角速度とに基づいて推定する状態観測器と、状態観測器が推定した対応するバネ要素のねじれ角度およびねじれ角速度に基づいて、対応するバネ要素のねじれが解消するトルクをモータが出力するように、対応するモータの制御入力に加算するトルク補償量を算出する複数のトルク補償量算出手段と、トルク補償量算出手段が算出したトルク補償量を加算した制御入力を対応するモータに出力する複数のモータ制御手段とを有する。
(もっと読む)
1 - 20 / 83
[ Back to top ]