
Fターム[3C007MT08]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 複数パターン、変化への対応 (220)
Fターム[3C007MT08]の下位に属するFターム
ワークの状態への対応 (119)
Fターム[3C007MT08]に分類される特許
1 - 20 / 101
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
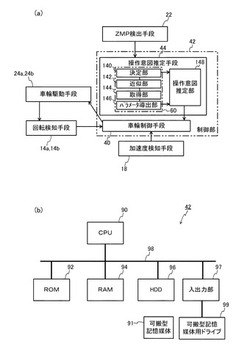
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
ティーチングデータ作成方法およびティーチングデータ作成装置

【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
ロボットシステム
【課題】高トルク運転時にモータに対して十分な電力を供給可能にするとともに、減速動作時にモータから生じる回生エネルギーを有効利用可能にする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。制御部27は、自動モードに設定されるとモータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替え、高トルクモードに設定されると昇圧動作を実行するように昇降圧回路29の動作を制御し、省エネモードに設定されると降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、回生エネルギーをインダクタL1に蓄積可能な状態となるように昇降圧回路29の動作を制御する機能と、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能とを有する。
(もっと読む)
ロボット制御パラメータ決定装置及び方法、ロボットの制御装置、ロボット装置、ロボット制御パラメータ決定プログラム、ロボット制御パラメータ決定用集積電子回路
【課題】人とロボットの操作部との接触領域の特徴量に応じてロボットの制御パラメータ値を変える。これにより、早く動かしやすいロボットの制御と、ゆっくり(又は正確に)動かしやすいロボットの制御とを操作部の握り方の変更により切り替え可能にする。
【解決手段】ロボットの操作部と人との接触領域の特徴量を取得する特徴量取得部と、ロボットの制御パラメータの値を、特徴量取得部が取得した特徴量に基づき決定する制御パラメータ決定部とを有し、制御パラメータ決定部は、特徴量に応じて、異なる移動範囲で操作感が良くなる制御パラメータの値を決定する。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
教育教材用ロボット
【課題】逐次制御から自動制御に切り替わる際のロボットの動作自由度を確保できる教育教材用ロボットを提供する。
【解決手段】本発明の教育教材用ロボットは、電気的な制御信号による逐次制御および実行オブジェクトであるプログラムによる自動制御の少なくとも一方に基づいて動作するロボットと、ロボットに制御信号を与える制御装置と、制御装置とロボットとを接続すると共に制御信号を電気的にやり取りする制御ケーブルと、を備え、制御装置は、逐次制御から自動制御に切り替える切り替え信号を、ロボットに出力可能であり、制御ケーブルは、切り替え信号に基づいて、ロボットに対する拘束力を弱める。
(もっと読む)
アーム装置
【課題】積極的に入力トルクと出力リンクの比を変化させ得るアーム装置を提供する。
【解決手段】アーム装置10であって、第一アーム1と、第一アーム1に対して第一軸11aを中心に回転可能に連結される第二アーム2と、第二アーム2に対して第二軸12aを中心に回転可能に連結されるリンク3と、リンク3に対して第三軸13aを中心に回転可能に連結されかつ第一アーム1に対して第四軸14aを中心に回転可能に連結されかつ第三軸13aと第四軸14aとの連結距離を伸縮可能に連結する入力機構4と、第三軸13aと第四軸14aとの連結距離20を伸縮させ得る伸縮源9と、第一アーム1に対して入力機構4を回転させることで第二アーム2を第一アーム1に対して回転させ得る動力源18とを有する。
(もっと読む)
バッテリー容量推定装置、その方法及びプログラム
【課題】移動経路で消費されるバッテリー容量を高精度に推定できるバッテリー容量推定装置、その方法及びプログラムを提供すること。
【解決手段】バッテリー容量推定装置は、地図情報を記憶する記憶手段と、地図情報における障害物の混雑の度合いを示す混雑度に基づいて、地図情報に対して安全率を設定する安全率設定手段と、記憶手段に記憶された地図情報において、現在位置から目的位置までの移動経路を算出する移動経路算出手段と、移動経路算出手段により算出された移動経路と、安全率設定手段により設定された地図情報の安全率と、に基づいて、移動経路で消費されるバッテリー容量を推定する容量推定手段と、を備えている。
(もっと読む)
歩行補助装置
【課題】 膝関節と足首関節を補助する動作と、膝関節の補助をなくし、足首関節を補助する動作とを実行することができる歩行補助装置を提供する。
【解決手段】 ユーザの上腿から下腿にかけて装着できるように構成されており、膝関節にトルクを加えるアクチュエータ38を有する膝装具30と、ユーザの下腿から足にかけて装着できるように構成されており、足首関節にトルクを加えるアクチュエータ58を有する短下肢装具50を備えており、膝装具30が短下肢装具50から分離されていることを特徴とする歩行補助装置10。
(もっと読む)
加工システム及び加工方法
【課題】加工装置による加工動作の最中やその直前においても、加工装置の位置決め制御の精度を向上させ、ひいては加工装置による加工精度も向上させること。
【解決手段】加工機12が取り付けられたロボット11は、ワーク2の加工対象の目標位置41までの移動動作と、加工対象に対する加工動作とを行う。ロボット移動機構14は、ロボット11を、搬送台車18により搬送されているワーク2と並走するように移動させる。ロボット制御装置17は、同期センサ15の検出結果を用いてロボット移動機構14の移動を制御し、視覚センサ13又は同期センサ15の検出結果を用いてロボット11の位置決め制御を実行する。
(もっと読む)
ロボットの姿勢判定方法
【課題】簡易な演算により、ロボットの姿勢を判定するロボットの姿勢判定方法を提供する。
【解決手段】ワークに想定される誤差Δpにともなうエンドエフェクタの位置の変化を位置変化量Δr、誤差Δpにともなうマニピュレータにおける各軸の変化量を姿勢変化量Δq、誤差Δpが存在しないときのマニピュレータの各軸の値をqiとし、このqiにおけるヤコビアンをJv(qi)とすると、姿勢変化量Δqを、Δqi=Jv(qi)-1Δrにより算出する。そして、誤差Δpが最大となるときのマニピュレータの各軸の変化量を変化量Δqimaxとし、関節の回転角度限界をqmaxとすると、qi+Δqimax≦qmaxを満たすマニピュレータの各軸の値qiを誤差Δpを有するワークに対し当該作業点iにおける作業が可能な姿勢であると判定する。
(もっと読む)
ロボットコントロール装置、ロボットコントロール方法
【課題】CPUが動作制御装置を単独で制御する用途、および、CPUを備えず動作指示装置からの指示に基づきロボットの動作制御する用途の両方の使い方を可能にするロボットコントロール装置、ロボットコントロール方法を提供することを課題とする。
【解決手段】ロボットコントロール装置1は、動作指示装置2と動作制御装置3とを備えている。動作制御装置3は、ロボット4が信号線5を介して接続されている。動作制御装置3は、通信ユニット300と動作制御ユニット400を備え、通信ユニット300と動作制御ユニット400とは、BUS端子302とBUS端子401を用いて接続され、通信ユニット300は、通信部301と、BUS端子302とを備え、動作制御ユニット400は、BUS端子401と、拡張ユニット判別部402と、実行部403と、第1記憶部404と、第2記憶部405と、ロボット制御部406とを備えている。
(もっと読む)
ロボットコントロール・システム、ロボットコントロール方法
【課題】ロボットコントロール・システムを停止することなく、動作制御装置に追加した機能部の制御プログラムの更新を行うことを可能にしたロボットコントロール・システムおよびロボットコントロール方法を提供することを課題としている。
【解決手段】ロボットコントロール・システム1は、動作制御装置2と動作指示装置3とを備え、ロボット4が接続されている。動作制御装置2は通信部201と通信変換部202と第1記憶部203と第2記憶部204と、プログラム実行部205と第3記憶部206とロボット制御部207と書き換え検証部208を備え、動作指示装置3は通信部301と演算部302とROM303とデータ読出部304と第4記憶部305を備えている。
(もっと読む)
ロボットアームの制御プログラム及び制御システム
【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
振動制御装置及び搬送装置
【課題】所望の位置へリンクを素早く、かつ、精度良く移動させるとともに、リンクが高速駆動している場合に消費電力を低減させることが可能な振動制御装置及び搬送装置を提供する。
【解決手段】基体10に対して移動可能な移動部20と、移動部20を駆動するアクチュエーター11と、回転角を検出する角度センサー30と、慣性力を検出する慣性センサー12と、制御信号を伝送する演算部13と、角度センサー30の検出信号を伝送する伝送部14と、命令信号を伝送する命令部15と、移動部20の駆動速度を判定する判定部16と、を有し、演算部13は、角度センサー30の検出信号の低周波数成分と慣性センサー12の検出信号の高周波数成分とに基づいて制御信号を生成し、判定部16は、移動部20の駆動速度が基準となる駆動速度よりも大きいと判定したときに、角度センサー30と伝送部14とのうち少なくとも一方を停止させる停止信号を生成する。
(もっと読む)
1 - 20 / 101
[ Back to top ]