
Fターム[3C007MT15]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | オープン化、ネット対応 (15)
Fターム[3C007MT15]に分類される特許
1 - 15 / 15
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
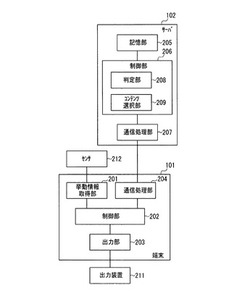
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
仮想空間と連係した多重ロボット制御装置および方法

【課題】ロボット適用の制約のうちの一つである実際環境の複雑性や動的な面に対する対応性を解決し、ユーザの好奇心の誘発や開発者の創意力を増大させること。
【解決手段】ロボット周辺の環境変化だけでなく、ウェブなどを含む仮想空間上における情報変化によるイベントが発生した場合、発生したイベントに対応する行為データを多数のロボットに送出する仮想空間と連係した多重ロボット制御装置を設け、該当ロボットの個別行為や群集行為を制御できるようにする。
(もっと読む)
多用途ロボット制御システム
【課題】商業標準のコンピュータシステムを利用し、異なるロボットに対応できるロボット制御システムを提供すること。
【解決手段】改良型の多用途ロボット制御システム10は、汎用オペレーティングシステムを有する汎用コンピュータ14を備える。この汎用コンピュータ14は、ロボット命令24のプログラム処理を選択的に開始および停止し、複数のロボット動作コマンド26を生成するプログラム実行モジュール18を含む。リアルタイムコンピュータサブシステムは、動作コマンドデータバッファ34と、動作を順次処理しロボットの機械ジョイントに必要な位置を計算するデータバッファ34にリンクされたロボット動作モジュール32と、動作モジュール32とソフトウェア的に通信する、ロボットのジョイント位置フィードバック信号44/46から必要なアクチュエータ活動化信号50/52を繰り返し計算する動的な制御アルゴリズム38とを含む。
(もっと読む)
ネットワーク基盤のロボットコンテンツ取引システム及び方法
【課題】本発明は、 ロボットの構成及び/または動作のためのコンテンツ(以下、“ロボットコンテンツ”という)をネットワークを利用してロボットユーザ同士間に共有、交換、売買などの方法により取引できるようにするネットワーク基盤のロボットコンテンツ取引システム及び方法を提供するためのものである。
【解決手段】本発明に係るネットワーク基盤のロボットコンテンツ取引システムは、ロボットコンテンツ作成用ソフトウェアプラットフォームを格納し、データ通信に必要とされる通信モジュールを含むように構成されて、ネットワークに連結されたロボットコンテンツ中継端末機と、上記ネットワークを介して上記ロボットコンテンツ中継端末機に連結されており、上記ロボットコンテンツ中継端末機を相対にして上記ソフトウェアプラットフォームで作成されたソフトウェアロボットコンテンツのアップロード及びダウンロードを遂行するロボットコンテンツ取引サーバとを含むことを特徴とする。
(もっと読む)
ロボット制御システム
【課題】ネットワーク上で制御装置とティーチペンダントとを接続する際、制御装置とティーチペンダントのノード間の接続手続きを簡略化できるとともに、又、間違ったノード間で接続してしまうリスクや、複数のティーチペンダントが重複して接続してしまうリスクを低減できるロボット制御システムを提供する。
【解決手段】
安全ノード14はコントローラ番号に基づく安全ノード14のIPアドレスを有する。安全ノード14は入力されたコントローラ番号に基づき安全ノード24、14及び非安全ノード15のIPアドレスを生成する。安全ノード14にて生成された接続したいコントローラの安全ノード及び非安全ノードのIPアドレスと、安全ノード14と非安全ノードのIPアドレスを使用して接続したいコントローラと接続関係を確立する。
(もっと読む)
情報管理システム
【課題】ユーザに高い満足を感じさせる観点からロボットを用いた適切な形態で、当該ユーザに対して情報を提供しうる情報管理システムを提供する。
【解決手段】本発明の情報管理システム10によれば、第1処理部11が、ロボット20がユーザとのコミュニケーションにより認識したユーザの要求を認識し、かつ、当該要求に応じた情報をデータベース102から検索する。また、第2処理部12が、情報出力機能を有する複数の情報処理端末30の中から、あらたな情報を出力可能な状態にあるという要件を満たす情報処理端末30を指定する。そして、第2処理部12が指定情報処理端末30に、第1処理部11による検索情報を出力させる。
(もっと読む)
ロボットコミュニケーションシステム
【課題】この発明は、ユーザ自らの音声をユーザが希望するアクションとともに、ロボットを介してを出力することができるロボットコミュニケーションシステム提供する。
【解決手段】 スピーカ、各部駆動手段及びこれらを制御する制御部並びに通信手段を備えたロボット装置2と、通常の携帯電話機能とロボット装置2と通信を行って諸動作を行わせるためのアクションコマンドデータ並びにメッセージデータの送受信を行う送受信手段とこれらデータ情報を格納する格納手段を備えた携帯電話装置1と、を備える。携帯電話装置1より使用者の音声データからなるメッセージデータとロボットの諸動作を行わせるためのアクションコマンドデータを送受信手段よりロボット装置2に送信し、ロボット装置2は受信したメッセージデータとアクションコマンドデータに基づき、使用者の音声データの再生とアクション動作を行う。
(もっと読む)
ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法
【課題】ネットワーク基盤のロボット制御システム及びネットワーク基盤のロボット制御システムにおけるロボット速度の制御方法を提供すること。
【解決手段】クライアントが上記ロボットにより撮影された映像データフレームの受信状態に応じてロボットの制御速度を計算し、計算されたロボットの制御速度を含むロボット制御メッセージを生成してロボットに送ることで、ロボットに、ロボット制御メッセージに含まれているロボット制御速度に応じて速度を変更させる。これにより、クライアントの映像データの受信状態に応じてロボットの速度を制御することから、ユーザーにクライアントの性能とは無関係に円滑にロボットの制御を行わせる。
(もっと読む)
少なくとも2本のロボットアームの同期化システムおよびその制御方法
【課題】少なくとも2本のロボットアーム相互間の同期化制御を行う。
【解決手段】ロボットマルチアーム制御システムは、製造プロセスを調整すべく、1またはそれ以上のスレーブコントローラに対しマスターコントローラからの同期化情報を伝送するため、ネットワークを介して通信するロボットコントローラを含む。該システムは、プロセスおよび運動の同期化のためイベントタイミングを同期化する場合に、ネットワーク通信の遅延を計算に入れる。
(もっと読む)
ネットワーク基盤のロボット制御システム
【課題】ネットワーク基盤のロボット制御システムに関するものである。
【解決手段】ロボット端末機及び通信モジュールとサービスサーバーからなるネットワーク基盤のロボット制御システムにおいて、前記サービスサーバーは、前記ロボット端末機のセンサーからセンシング値を前記通信モジュールを通じて受信し、互いに同期される動作制御データ、音声データまたは映像データが一つのパケットに含まれるようにするダウンパケットなどを生成し、前記生成されたダウンパケットを前記通信モジュールを通じて前記ロボット端末機へ伝送し;前記ロボット端末機は、前記伝送されたダウンパケットなどを受信しダウンバッファに順に貯蔵し、前記ダウンバッファに貯蔵したダウンパケットなどを読み出し、読み出されたダウンパケットに対応する動作、音声または映像再生することを特徴とする。
(もっと読む)
ロボット及び通信ロボットシステム
【課題】 早期に周囲の環境に適応することができるロボット及び通信ロボットシステムを提供することを課題とする。
【解決手段】 ロボット1に関する環境を検出する検出手段2,3と、予め想定される複数の環境に応じてそれぞれ学習させた複数の遺伝子11a,11bと、検出手段2,3で検出した環境に応じて複数の遺伝子11a,11bを切り替える切替手段13とを備え、切替手段13により切り替えた遺伝子に基づいて行動することを特徴とする。
(もっと読む)
ロボット装置及びそのコンテンツ管理方法
【課題】 取得したコンテンツをより生物的な方法により管理するロボット装置及びそのコンテンツ管理方法を提供する。
【解決手段】 要求モジュール10でコンテンツ要求が生成されると、取得モジュール20は、インターネット上でコンテンツを検索して取得し、フィルタユニット23は、管理モジュール30や内部状態モジュール50からの情報に基づいてそのコンテンツをフィルタリングする。コンテンツ多次元化ユニット26は、フィルタリングされたコンテンツを詳細レベル、要約レベル、存在レベル及び削除レベルの4つのレベルに変換してコンテンツ保存部40に保存する。ライフタイムユニット32は、保存されているコンテンツのライフタイムを監視する。コンテンツ削除ユニット33は、削除レベルとなったコンテンツ或いは重要度が低いコンテンツを削除すると共に、削除したコンテンツに関する情報をフィルタユニット23に登録させる。
(もっと読む)
通信方法、並びにロボットのタスク実行方法及び該システム
【課題】 サーバからのタスク実行依頼に基づきロボットがタスクを実行する上で、良好にサーバとロボット間の通信を行い、確実かつ円滑にタスクの実行処理を行うことを目的とする。
【解決手段】 通信機能を有するロボット10が、ネットワークを介したサーバ40からのタスク実行要求に基づきタスクを実行する方法において、前記サーバ40が、要求タスク情報と、ネットワーク30を介して前記ロボット10から取得した該ロボットのプロファイル情報とを比較して、要求タスクの実行可否の判定を行なう第1の判定ステップと、第1の判定ステップにより実行可能であると判定された場合に、ロボット10が前記サーバ40より要求タスク情報を受信して、該ロボット10のステイタス情報に基づき前記タスクの実行可否を判定する第2の判定ステップと、これらの判定結果を含む見積り情報をサーバに通知する見積り情報通知ステップと、を備えた。
(もっと読む)
データ更新システム、データ更新方法、およびデータ更新プログラム、ならびにロボットシステム
所定の機能を実現するプログラムを実行するロボットに含まれるサブシステム(110)は、ロボットの機能を拡張する拡張データを受信するデータ受信部(115)と、受信した拡張データを組み込むデータ組込部(116)と、所定の条件に対応するパスワードを出力するパスワード出力部(113)と、を含み、複数の拡張データを提供するサーバサブシステム(100)は、ユーザによるパスワードの入力を受け付ける端末通信部(101)と、受け付けたパスワードに対応する複数の拡張データを取得し、ユーザに提示する選択肢提示部(125)と、ユーザの選択を受け付けるデータ選択部(104)と、選択された拡張データをロボットサブシステム(110)に送信するデータ送信部(106)と、を含む。 (もっと読む)
パソコン・バイオ・ナノ・IT機器装脱着施術設置など々、の生活ナレッジナノクローンシステム携帯電話機ロボット(以下ロボットと記す)
【課 題】 人間は、神様の創造物であるとするならば、ロボットは、人間の創造物であり、パートナーとすることで、人間に役だつ機能を具備構成し、日常生活に手助け有効な生活ナレッジナノクローンシステム携帯電話機ロボツトが、人間を上廻る知能を、なしえない事もやってくれるロボットを提供する。
【解決手段】 携帯電話機本体がロボット(検索ロボット呼称など)の役目をする。有線、無線基地局、インターネットプロトコル電話局などと通信して、情報交換、制御データベース変換、履歴ファイル処理、データに基づいた画・映像表示、言語翻訳音声認識、記憶、プログラム入出力指示、発着信指示、駆動指示、電波電源タイムスイッチ切り替え指示入出力部、通信、データモード、識別コード、GPS位置情報等々有し構成する。通信網を介して、ITバイオインフォマティクスロボット、センサーで安全に飛行するロボットを、車の代用とする。又多種多様のロボットを提供できる。
(もっと読む)
1 - 15 / 15
[ Back to top ]