
Fターム[3C007NS06]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 形状 (232) | 角柱体 (14)
Fターム[3C007NS06]に分類される特許
1 - 14 / 14
ロボットハンド
【課題】把持部で把持した把持対象の回転精度を向上させることができるとともに、その回転量も大きくすることが可能なロボットハンドを得ること。
【解決手段】本発明のロボットハンド1は、把持対象を把持して回転させるロボットハンドであって、把持対象を挟み込んで把持すべく平行に開閉動作する一対の把持部11,12と、把持対象を把持した状態において、把持部同士の相対的な位置をずらすように、把持対象の回転軸Oと垂直な方向に少なくとも一方の把持部を移動させる移動手段と、を有する。
(もっと読む)
被把持体の把持装置

【課題】本発明は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸が配置される前記被把持体の被把持面を把持する把持部と、前記被把持体の端面が当接する当接部を有する把持装置において、被把持体を所望の姿勢で把持可能なコンパクトな被把持体の把持装置を提供することを目的としている。
【解決手段】本発明に係わる被把持体の把持装置は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸を位置決めすべき前記被把持体の被把持面を開閉して把持する把持部と、前記被把持体の端面が当接する当接部と、前記被把持体の端面と前記当接部を離接させるとともに前記当接部と前記被把持体の端面との間に所定の間隙を形成する間隙形成部とを有することを特徴とする被把持体の把持装置である。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
グリッパ装置およびその構築モジュール
【課題】機械的手段によって弾性的に変形可能であると共に、物品および物体をしっかりと掴むのに適した空気式制御グリッパ装置を提供すること。
【解決手段】支持体のジオメトリ軸の周囲に、平行かつ角度的に離間されて位置決めされた複数のグリッパモジュールを保持する支持体と、各モジュールは、筐体の一側面に沿って半径方向スロット18に沿った外弧を有し、アクチュエータピストンが係合するアーチ形の可撓性適把握要素21を備える。すべての適把握要素は、外弧が各スロット内に退避した収縮解除静止状態と、外弧が前記半径方向スロットから突出して、掴む対象の物品、物体、またはケースに係合する圧縮/収縮作業状態との間で可動である。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
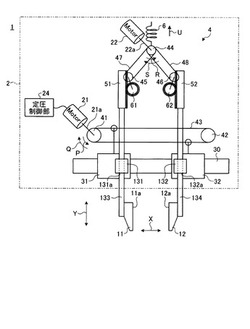
セラミックス柱状体用移載装置及びセラミックス柱状体の移載方法
【課題】長尺で真直度の悪いセラミックス焼成体をロボットで移載するに際し、応力集中等によるクラックの発生や破損が起こり難い手段を提供すること。
【解決手段】球面及び平面を呈する緩衝材で構成される複数の当接パッド52a,52bをパッド用枠体42a,42bに支持をするとともに弾性機構72a,72bを備える当接パッドシャフト62a,62b、及び、その当接パッドシャフト62a,62bが弾性機構72a,72bによって外部圧力を吸収した状態を保持する状態保持機構82a,82bを備える一対のグリッパユニット22a,22bと、その一対のグリッパユニット22a,22bの間隔を調整する間隔調整機構32と、で構成されるグリッパ12を具備するセラミックス柱状体用移載装置の提供による。
(もっと読む)
木材搬送装置
【課題】構造の簡素化を図り、製造コスト及びメンテナンスコストの軽減を実現し得る木材搬送装置を提供する。
【解決手段】木材2の長手方向に離間した少なくとも2つの部位を個別に保持する保持手段8を備え、当該保持手段8は、前記木材2をその長手方向と直角な方向から挿入可能な間隔で配設されると共に互いに平行を成す一対の棒状の保持部材13,13を有し、当該一対の保持部材13,13を、各保持部材13,13に平行な軸線Yを中心に一体的に回動可能に構成した。
(もっと読む)
組立て用ロボットハンド
【課題】 コンプライアンス作用の中心位置およびコンプライアンスの大きさを任意に変更可能で、かつ受動的な動作で、複雑な計算を必要としない組立て用ロボットハンドを提供することである。
【解決手段】 一つの中心線12に対して線対称に配置され、かつ、この中心線と直角をなす複数個の遥動軸の周りに前記中心線と重なる複数個の平面上に遥動可能な複数個のチャック爪13と、複数個の遥動軸の中心位置を前記一つの中心線と略直角をなす方向に移動させる手段と、複数個のチャック爪の先端部に力を負荷する複数個の手段とから構成され、複数個の遥動軸の位置および先端部に負荷される力の大きさを変化させることにより、軸状部材のコンプライアンス作用の中心位置およびコンプライアンスの大きさを調整できるようにしたことを特徴とする組立て用ロボットハンド。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
物品のグリッパ
2つの端板の間に延びる束状の貫通管を有する様々な大きさの熱交換器のような物品(6)を固定するための装置(1)であって、装置は1つのグリッパを備え、グリッパは、第1および第2のグリッパアーム(7)を含み、それらの間に1つの物品(6)をつかむために、それらのうち一方は他方のグリッパアームに対して可動であり、さらに前記グリッパを必要に応じて閉じるか開くかするために、前記第1および第2のグリッパアームの1つに接続された駆動機構(15)を含み、第1および第2のグリッパアームの1つは、第1のグリッパアーム部(9)および第2のグリッパアーム部(10)を有し、第1および第2のグリッパアーム部は互いに回動自在に結合されており、さらに前記第1および第2のグリッパアーム部の間に設けられた調整機構(12)を有し、調整機構は、物品を固定する前に、固定される物品の直径に依存して前記グリッパアーム部間の角度を調整するために設けられた、物品を固定するための装置(1)。  (もっと読む)
(もっと読む)
物品移載装置
【課題】構成の簡素化及びコストの低減を図りながら、移載対象の物品の把持に適した水平方向での位置に対する対把持手段の移動位置の精度の向上を図る。
【解決手段】平面視での物品1の存在範囲における一部に相当する範囲を検出範囲として物品1の存否を上方側より検出作用する存否検出手段15が、物品1の端部を検出したときにその物品1に対する把持手段2の水平方向での位置が把持に適する位置関係となる状態で把持手段2に装備され、制御手段が、準備用設定位置に把持手段2を移動させる把持手段2の移動を制御する準備移動処理を行い、次に、存否検出手段15の検出情報に基づいて移載対象の物品1の平面視における端部を検出するように把持手段2を水平移動させるべく、把持手段2の移動を制御する端部検出移動処理を行い、その後移載対象の物品1を把持する把持処理を行うように構成されている。
(もっと読む)
ロボットハンド
【課題】リモコンや電話機のハンドセット等の幅や厚みの異なる長尺物体を滑らかに移動させることが可能なロボットハンドを提供する。
【解決手段】ロボットハンド10は、親指11、人差し指12、中指13、薬指14、及び小指15と、各指11〜15の付け根を支持する手の平部16と、手の平部16に設けられた搬送ベルト機構17とを備えている。搬送ベルト機構17は、手の平部16を斜めに横切る様に配置された搬送ベルト17aを有しており、この搬送ベルト17aを矢印Aに示す様に順方向及び逆方向に回転移動させて、この搬送ベルト17aに当接する対象物を順方向及び逆方向に搬送する。この搬送ベルト17aの搬送面は、手の平部16の面に対して矢印Aの搬送方向と直交する方向で角度αだけ傾斜している。
(もっと読む)
多関節ロボットのツール位置補正方法
【課題】 多関節ロボットのツールの位置ズレを補正して移動位置精度を向上させる。
【解決手段】 ロボットハンド21のハンド位置設定点Hを任意の補正基準位置m1に移動し、指標5bのツール位置座標と基準オフセット量とを算出する。ロボットハンド21を補正基準位置m1を中心に所定角度回転させて指標5bのツール位置座標を求め、このツール位置座標と基準オフセット量とから、その回転位置に対応した基準補正位置m2を求める。この基準補正位置m2と基準補正位置m1との間の距離(Xr2,Yr2)がロボットハンド21の回転時に発生する位置ズレ量であり、補正データとして記憶される。視覚センサによって検出されたワーク5の位置にロボットハンド21を移動させる際には、ロボットハンド21の回転角度に対応した補正データを読み出し、この補正データによって指標5bのツール位置座標を補正する。
(もっと読む)
1 - 14 / 14
[ Back to top ]