
Fターム[3C007WB00]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266)
Fターム[3C007WB00]の下位に属するFターム
歩行制御 (469)
行動制御(感情も含む) (795)
Fターム[3C007WB00]に分類される特許
1 - 2 / 2
コントローラおよびそれを用いた移動ロボットシステム
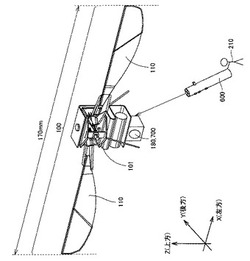
【課題】障害物の多い空間を移動するロボットを直感的に操作することができるコントローラを備えて移動ロボットシステムを提供する。
【解決手段】移動ロボットシステムは、ポインタコントローラ600と、ポインタコントローラ600によって操縦される浮上移動装置100とを備えている。オペレータ210がポインタコントローラ600を握持した状態で所定の方向を指し示せば、浮上移動装置100は所定の方向における所定の位置へ向かって移動する。
(もっと読む)
歩行体

【課題】多様な動作を実行可能な歩行体を実現すること。
【解決手段】歩行可能な歩行体であって、該歩行体が歩行するための脚と、該歩行体の姿勢を安定化させるための姿勢安定化手段と、を有することを特徴とする。また、整地での車輪走行モ−ドと、階段などの不整地での2足歩行モ−ドとの切り替え機能をも備えた構成としする。
(もっと読む)
1 - 2 / 2
[ Back to top ]