
Fターム[3C007WB14]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 履歴を利用するもの (47)
Fターム[3C007WB14]に分類される特許
1 - 20 / 47
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
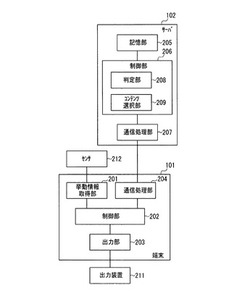
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法

【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 ロボット装置自身の感情や本能等の状態に基づいて自律的に行動することを可能とする。
【解決手段】 供給される入力情報S1〜S3に応じた動作を行うロボット装置1であって、順次供給される入力情報S1〜S3の履歴に応じた現在の動作及び次に供給される入力情報S1〜S3に基づいて現在の動作に続く次の動作を、コントローラ32内の動作決定部が決定することにより、ロボット装置1自身の感情や本能等の状態に基づいて自律的に行動する。
(もっと読む)
人型ロボット
【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
ロボット操作装置及びロボット操作システム
【課題】移動経路に自由度を持たせながらも、ユーザによる移動位置の指定操作が煩雑になるのを防止することが可能なロボット操作装置等を提供する。
【解決手段】ロボットに動作指示を与え、ロボットを動作させるためのロボット操作装置であって、ユーザが操作をする操作入力部102と、操作入力部102の操作によってユーザから入力された動作指示の履歴を蓄積するベースポイントデータベース105と、ベースポイントデータべース105に蓄積された動作指示の履歴に基づいてロボットが次に動作する動作候補を複数生成する動作候補生成部108bと、動作候補生成部108bで生成された複数の動作候補をユーザにより選択可能に提示する情報提示部103とを備えたものである。
(もっと読む)
行動決定装置、行動学習装置、及びロボット装置
【課題】入力情報から一つの情報空間に各々モジュール化した知能的判断システムを構築することができる行動学習装置及び方法、それによって生成された学習結果を使用した行動決定装置及び方法、これらの装置を搭載したロボット装置を提供すること。
【解決手段】ロボットは、外部からの指示情報から単語を抽出する知識取得部21と、抽出した単語によりネットワークを構築し、単語間の重みを更新するネットワーク構築部22と、単語の関係性をネットワーク上で重み付けした単語ネットワークに基づき、行動を決定する行動決定部23とを有する。
(もっと読む)
ロボット制御システム、ロボット、プログラム及び情報記憶媒体
【課題】ロボットを介したユーザ間の間接的なコミュニケーションを実現できるロボット制御システム、ロボット、プログラム及び情報記憶媒体を提供する。
【解決手段】ロボット制御システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つからのセンサ情報により得られるユーザ情報を取得するユーザ情報取得部と、取得されたユーザ情報に基づいてロボットがユーザに対して提示する提示情報の決定処理を行う提示情報決定部と、提示情報をユーザに対してロボットに提示させるための制御を行うロボット制御部とを含む。ユーザ情報取得部は、第2のユーザのユーザ情報である第2のユーザ情報を取得し、提示情報決定部は、取得された第2のユーザ情報に基づいて、第1のユーザへの提示情報の決定処理を行う。ロボット制御部は、第2のユーザ情報に基づき決定された提示情報を第1のユーザに提示するためのロボット制御を行う。
(もっと読む)
ロボット制御システム
【構成】ロボット制御システム10はロボット12を含み、このロボット12は、コミュニケーション行動の動作履歴情報を中央制御装置14に送信する。中央制御装置14は、ロボット12からの動作履歴情報のうち遠隔操作によるものに基づいて、個人用ビヘービア遷移DB,年代・性別依存ビヘービア遷移DBおよび場所依存ビヘービア遷移DBを構築する。そして、ロボット12は、対話相手の名前、年代・性別、または場所に応じたDBを選択し、選択したDBを参照して、現在のロボット12の動作を示すコマンドと、そのロボット12の動作に対する対話相手の行動とに一致する動作履歴情報に基づいて、次のコミュニケーション行動を決定する。
【効果】遠隔操作の動作履歴情報に基づいて自律行動を行うので、オペレータの遠隔操作の回数をできるだけ減らすことができる。
(もっと読む)
ロボット装置及びその制御方法
【課題】利用者に対してよりパーソナルなロボット装置を提供する。
【解決手段】過去における各利用者による操作履歴や対話履歴、及びロボット感情値を状態管理テーブル123に保持する。本ロボット装置の人物特定手段108は新たに遭遇した人物が過去の利用者であることが判明すると、感情・性格性格手段106は現在のロボット感情値122と状態管理テーブル123に保存された該当人物の過去のロボット感情値を参照して、新たなロボット感情値を生成する。
(もっと読む)
ロボット制御システム、ロボット、プログラム及び情報記憶媒体
【課題】ユーザの行動や状況を反映したロボット制御を実現できるロボット制御システム、ロボット、プログラム及び情報記憶媒体の提供。
【解決手段】ロボット制御システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つからのセンサ情報により得られるユーザ情報を取得するユーザ情報取得部と、取得されたユーザ情報に基づいてロボットがユーザに対して提示する提示情報の決定処理を行う提示情報決定部と、提示情報をユーザに対してロボットに提示させるための制御を行うロボット制御部を含む。提示情報決定部は、取得された同じユーザ情報に対して第1、第2のロボットが異なる提示情報を提示するようにユーザに対して提示する提示情報の決定処理を行う。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、精度の高いユーザ位置およびユーザ識別情報を効率的に生成する構成を実現する
【解決手段】カメラやマイクによって取得される画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力して、複数ターゲットを設定した複数パーティクルを適用したパーティクルフィルタリング処理を行い仮説の更新取捨選択によりユーザ位置および識別情報を生成する。また、カメラの画像フレーム外に仮想ターゲットを設定した暫定ターゲットとイベント検出部の生成するイベント情報との尤度を検証し、検証結果に応じて暫定ターゲットを各パーティクルに追加する。本構成により、フレーム外ユーザの音声入力に対応した処理が可能となり、ユーザ位置や識別の正確な推定処理が実現される。
(もっと読む)
家事支援ロボットアームの移動制御システムおよび移動制御方法および移動制御プログラム
【課題】最適な待機位置を求めることで、平均の待ち時間を短くすることができる家事支援ロボットアームの移動制御を提供する。
【解決手段】人検出手段402と、物品検出手段403と、検出履歴データベース404と、作業履歴データベース406と、属性管理データベース407と、物品から作業が行われる可能性のある候補位置を求める作業候補位置決定手段408と、前記候補位置において、次に作業が行われる可能性を求める作業確率算出手段409と、前記候補位置において、次の作業が行われると想定したときの、作業確率を考慮した待ち時間の最大値を最小化する待機位置を求めるアーム位置算出手段410を備える。
(もっと読む)
移動型ロボット
【課題】複数の可動部または音声出力部のいずれかの部位を使用していない場合にその部位を有効に活用して対話対象の発話を誘発する行動のできる移動型ロボットを提供する。
【解決手段】ロボットは、対話対象の発話を誘発するために実行する対話誘発動作を、1つ以上の部位を使用して対話対象が知覚可能な単独の動作またはその組合せとして各部位に実行させる制御を行う対話誘発動作制御部47と、対話誘発動作とそれを実行するために使用する部位とを関連付けた情報を示す対話誘発動作情報を複数記憶した対話誘発動作情報記憶手段33とを備え、対話誘発動作制御部47は、現在使用中の部位を検出する使用状況検出手段110と、検出された部位と対話誘発動作情報とに基づいて対話誘発動作を決定する対話誘発動作決定手段120と、決定された対話誘発動作に使用する部位に対して動作を実行させる知覚可能動作制御手段130とを有する。
(もっと読む)
ロボット
【課題】 ロボットとの対話時に、ユーザがメモとして記録しておきたい部分を自動的に記録し、ユーザがロボットとの対話時に発する音声を基にメモを自動的に再生することにより物忘れ防止が可能なロボットの提供
【解決手段】 ロボットとモニタ対象者の対話中にメモ処理部31は、対話処理部24から正規化されたモニタ対象者の入力音声を取得する。メモ登録処理部31−1は入力音声と登録用キーワードが一致するとそれに続く音声をメモ音声としてメモ音声登録メモリに登録する。また、メモ再生処理部31−2は、入力音声が再生用キーワードと一致するとメモ音声を再生する。また、入力音声が停止用キーワードと一致するとメモ音声再生を停止する。
(もっと読む)
行動制御装置、方法、プログラム
【課題】ユーザの周囲を移動体が移動しているにもかかわらず、ユーザは特に注意を向けた時以外は、その移動体の存在を意識せずに済むことを可能とする移動体の行動を生成する。
【解決手段】行動制御装置は、移動体の活動空間における情報を収集し、人間の位置情報および方位情報を取得する。取得した人間の位置情報および方位情報に基づいて、人間について排他的空間を設定する。そして、行動制御装置は、移動体が人間に通知すべき情報があるか否かを判断する。通知すべき情報がないと判断した場合、行動制御装置は、前記人間について設定された排他的空間の領域外に移動体が位置するよう、移動体の目標位置、目標方位、目標経路を設定する。
(もっと読む)
ロボット
【課題】現在実行すべきタスクを有していないときに能動的に行動するロボットを提供する。
【解決手段】ロボットは、人物を検知する対象検知部と、タスクを実行するための行動計画を管理する行動計画管理部46とを備え、人物に対して行った過去の行動を数値化し、当該人物に対して行う次の行動の実行可能性の大きさを示すモチベーション指数を算出するモチベーション指数算出手段476と、ロボットの内部状態としてバッテリ残量を検出する内部状態検出部45と、バッテリ残量が所定のしきい値より小さいか否かを判別する内部状態判別手段471と、バッテリ残量が行動に支障をきたす状態ではない場合に、現在実行すべきタスクを保有しているか否かを判別するタスク判別手段473と、現在実行すべきタスクを保有していない場合にモチベーション指数に基づいて人物に対して次に行う行動計画を追加する行動計画追加手段475とを備える。
(もっと読む)
ロボットの制御方法、制御装置、制御プログラムおよび記録媒体
【課題】 ロボットが定型的に行う作業シーケンスを蓄積した作業データベースを構築できるようにする。
【解決手段】 作業シーケンスのデータベースから作業シーケンスを取得し(ステップ201)、前記作業シーケンスを上層から展開し(ステップ202)、対象物体固有の動作指令か否かを判別し(ステップ203)、対象物体固有の動作指令でなければ作業を実行し(ステップ206)、対象物体固有の動作指令であれば、対象物体ごとのデータベースから動作指令を取得し(ステップ204)、作業データを編集し(ステップ205)、作業を実行する(ステップ206)という手順で処理する。
(もっと読む)
移動ロボット、並びに、移動ロボットの制御装置、移動ロボットの制御方法及び移動ロボットの制御プログラム
【課題】無線通信が切断される場所に移動した場合であっても、自律的に無線通信を復旧できる場所に移動することが可能な移動ロボットを提供する。
【解決手段】移動ロボットは、移動領域の地図データと、当該移動領域における無線環境に関連する複数の無線環境データで構成した総合無線環境データとを対応付けた無線環境マップを記憶した記憶部140と、移動領域内における自己位置を認識する位置認識部201と、無線環境の状態を監視する監視部202と、無線通信が切断された状態となった場合に、無線環境マップに基づいて、無線通信の接続が可能な復旧位置を探索する探索手段203と、自己位置から復旧位置までの移動を移動制御部130に指示する移動指示部204aと、を備える。
(もっと読む)
動きデータ生成装置、動きデータ生成方法及び動きデータ生成プログラム
【課題】音楽の曲調に同期した動きの動きデータを生成する。
【解決手段】所定の動きパターンに応じた動きパターンデータを記憶しておいて、音楽データを分析して当該音楽データに基づく音楽のビートを検出して、当該検出したビートに基づいて音楽データを複数の小節区間に区切ったとき、当該区切った音楽データの小節区間に対して動きパターンデータを割り当てるようにして、動きデータを生成するようにしたことにより、音楽データと共に動きデータを再生するとき、音楽データMD1に基づく音楽を楽譜で表現したときの、小節に対応する第1の小節区間MS1及び第2の小節区間MS2の切り換えに同期させて、動きパターンを切り換えることができ、かくして、音楽の曲調に同期した動きの動きデータを生成し得る。
(もっと読む)
ロボット及びその制御方法
【課題】ユーザにとってより現実のペットの形態に近いロボットを提供する。
【解決手段】
ロボットは、被写体を撮像する撮像部と、ユーザとのコミュニケーションの頻度に応じて撮像部の撮像条件を切り替える撮像条件切替部と、撮像部が撮像した画像をプリントするプリント部とを備える。撮像条件切替部は、コミュニケーションの回数をユーザが当該ロボットに触れた回数をもって特定する。撮像条件切替部は、頻度が予め定められた基準値以下となったことを条件として、ピントが被写体にあっていない画像を撮像部が撮像するように撮像条件を切り替える。
(もっと読む)
1 - 20 / 47
[ Back to top ]