
Fターム[3C007WC00]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746)
Fターム[3C007WC00]の下位に属するFターム
成長するもの (10)
PC等外部機器と接続するもの (46)
シミュレーション機能を有するもの (9)
人へのメッセージ伝達手段 (104)
アブノーマルな状態からの復帰 (12)
利用方法 (187)
付属品の構成の特徴 (42)
ロボット本体の構成の特徴 (330)
Fターム[3C007WC00]に分類される特許
1 - 6 / 6
セキュリティネットワークロボットサービスを提供する方法及び装置
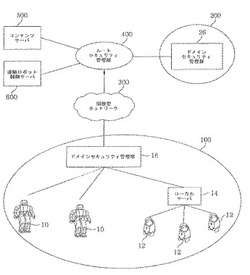
【課題】各ロボットサービスの主体が安全に通信できるようにするネットワークロボットサービスのためのセキュリティサービス技術を提供する。
【解決手段】ドメイン内に存在する少なくとも1つ以上のクライアントロボット10、12と連結される、前記クライアントロボット10、12と外部サーバ500、600間の共有キーを生成し、前記共有キーを含むキー分配要請メッセージを生成し、前記キー分配要請メッセージを前記外部サーバ500、600に伝送するドメインセキュリティ管理部16と、前記ドメイン外に存在する少なくとも1つ以上の前記外部サーバ500、600及び前記ドメインセキュリティ管理部16とネットワークを介して連結されるルートセキュリティ管理部400とを含むシステムにより、各ロボットサービスの主体が安全に通信できるようにする。
(もっと読む)
模倣学習のためのタスク固有の表現の自動選択を備えたロボット

【課題】模倣学習に優れたロボットの制御方法を提案すること。
【解決手段】該ロボットの環境におけるエンティティの動きを観察するステップと、感覚データストリームを用いて該観察した動きを記録し、該記録した動きを、異なるタスク空間表現で表現するステップと、前記模倣学習のために前記タスク空間表現の一部を選択し、模倣されるべき該動きを再現するステップであって、該タスク空間表現の一部は、該動きを再現するため、1つのタスク空間表現を含み、または、一連の異なるタスク空間表現を含む、ステップと、を含む方法を用いる。
(もっと読む)
ロボット装置、顔認識方法及び顔認識装置
【課題】 動的に変化する環境下でロボットはユーザの顔を一定時間内に認識する。
【解決手段】 ロボットは、CCDカメラによる撮像画像に含まれる顔の特徴を抽出する顔抽出部と、前記顔抽出部による顔抽出結果を基に顔を認識する顔認識部を備えている。顔抽出部は方位選択性を持ち周波数成分の異なる複数のフィルタを用いて画像をフィルタリングするガボア・フィルタで構成され、顔認識部は顔抽出結果を非線型な空間に一度写像して該空間内で分離する超平面を求めることにより顔と非顔とを識別するサポート・ベクタ・マシーンで構成される。
(もっと読む)
移動性能試験装置
【課題】対象物体の位置をトレッドミル上の適当な位置に維持しながら、当該対象物体の移動性能を試験しうる装置を提供する。
【解決手段】本発明の移動性能試験装置1によれば、複数のモータ12のそれぞれにより回転駆動されている複数のエンドレスベルト11の上で、ロボット2が第2方向に向かうように脚体22を動かしている状態で、当該第2方向と異なる第1方向についてロボット2の位置の第1目標意図からの偏差等が「第1偏差」として測定される。そして、第1偏差が解消するように複数のモータ12のそれぞれの動作が制御される。
(もっと読む)
ホームロボットにおける処理方法及びホームロボット
【課題】ロボットが離れた場所にいるユーザの助けを必要とする時のユーザの手間を削減できるホームロボットを提供する。
【解決手段】ユーザから離れる必要があるタスクの実行要求を検知し、該実行要求の検知により前記家電機器を用いたユーザとの対話方法を選択し、選択した対話方法に従ってユーザに対する問い合わせ及びユーザからの回答を含む、ユーザとの対話を実行する。
(もっと読む)
電源装置
【課題】 安全性の向上を図ることができる電源装置を提供する。
【解決手段】 電源装置1は、電源箱2に収容されたバッテリ3と、バッテリ3の出力端子に線材5を介して接続されて電源箱2の外に引出され駆動部11又は充電器12と接続可能とされた出力コネクタ13と、を備え、線材5の途中に介在された断続回路30と、断続回路30に接続されて電源箱2に固定された第1のスイッチ33と、断続回路30に配線34を介して接続されて電源箱2の外に引出された第2のスイッチ36と、を有し、断続回路30は、第1のスイッチ33及び第2のスイッチ36が共にオンされたときにのみバッテリ3の出力端子及び出力コネクタ13を電気的に接続する。電源装置1を搭乗型ロボット10から取出して運搬する場合、第2のスイッチ36をオフすることにより、出力コネクタ13への通電状態は解消され、感電などの事故発生を招くことがない。
(もっと読む)
1 - 6 / 6
[ Back to top ]