
Fターム[3C030BB03]の内容
Fターム[3C030BB03]に分類される特許
1 - 20 / 45
圧入方法および圧入装置
【課題】圧接係合面が周方向の一部で非圧接部に隣接する場合に、加工コスト高を招くことなく、バリやかじりの発生を防止できる圧入方法および圧入装置を提供する。
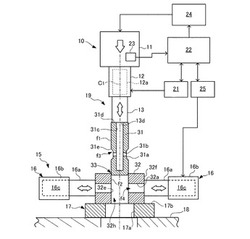
【解決手段】圧入部品31に圧入方向に向かう推力および縦方向振動の加振力を加えるとともに、被圧入部品32に圧入方向と直交する半径方向に向かう横方向振動の加振力を加える圧入方法であって、圧入部品31および被圧入部品32に、圧入時に互いに圧接する圧接係合面f1,f2と、その圧接係合面f1,f2の周方向の一部に隣接し圧入時に互いに圧接しない非圧接部f3,f4とを形成しておき、圧入部品31を被圧入部品32に圧入する際に、被圧入部品32に対し、圧接係合面f1,f2の周方向の一部を通る特定の半径方向に向けて横方向振動の加振力を加える。
(もっと読む)
圧入装置

【課題】加振によって圧入嵌合部品の圧入推力が損なわれないようにし、ポアソン効果による圧入嵌合代の縮小時に圧入部位の圧入ストロークを確保可能な圧入装置を提供する。
【解決手段】圧入部品31を被圧入部品32に圧入するよう一方の圧入部品31を圧入方向に押圧する圧入推力を加える加圧ヘッド14と、圧入部品31を圧入方向に振動させる振動推力を加える加振ヘッド13と、を備え、圧入部品31および被圧入部品32の嵌合部位33に対し、加圧ヘッド14からの圧入推力と加振ヘッド13からの振動推力とを互いに独立した伝達経路で加えるように構成する。
(もっと読む)
搬送装置及び搬送方法
【課題】回転方向の位置ずれを抑制し、高精度な位置決めを行うことができる搬送装置を提供する。
【解決手段】本発明に係る搬送装置は、支持部11に対しフローティング状態で設置される搬送プレート12と、搬送プレート12と一体に変位可能な第1位置決め部16と、搬送プレート12に対向して配置されたワーク21が載置される冶具プレート20と一体に変位可能であり、第1位置決め部16に嵌合することにより搬送プレート12の位置を規制する第2位置決め部19とを有し、第1位置決め部16及び第2位置決め部19が回転防止可能な形状であることを特徴とする。
(もっと読む)
旋回圧入装置
【課題】ワークの圧入時に把持爪に大きな圧入負荷がかからないような旋回圧入装置及び旋回圧入方法を提供すること。
【解決手段】軸線を有する一方圧入ワークを側方から把持可能な把持爪20と、把持爪の一方圧入ワークに対する把持動作及び開放動作を駆動する開閉駆動機構と、把持爪及び開閉駆動機構を軸線回りに回転させる回転機構と、把持爪に把持された一方圧入ワークからの軸線方向の荷重を受ける荷重受部材50と、を備え、把持爪、開閉駆動機構及び回転機構は、荷重受部材に対して、軸線方向に相対移動可能な機構を介して連結されていることを特徴とする旋回圧入装置10である。
(もっと読む)
ロボットシステム
【課題】シャフトに対して環状部品を嵌合する組立作業をロボットによって自動的に行う場合に、歩留まりを向上させること。
【解決手段】ロボットシステムは、環状部品の内周面と係合する係合部材を周面に取付け可能なシャフトを把持して回動させるロボットと、前記環状部品を固定するための冶具と、前記環状部品が嵌合された前記シャフトを前記ロボットによって把持させ、該環状部品を前記冶具へ接触させた状態で、前記ロボットによって該シャフトへ回動力を付加させる制御部と、前記回動力を付加させた場合における前記ロボットの動作に基づいて前記シャフトへ前記係合部材が取付け済みか否かを判定する判定部とを備える。
(もっと読む)
部品供給構造部および部品供給方法
【課題】磁石を利用した部品供給において、部品を目的箇所へ到達させる力を大きくする。
【解決手段】保持部材15を移動することによって磁性材料製の部品1を目的箇所6へ到達させるものであって、保持部材15に取り付けた第1磁石19の極性が、部品1のほぼ移動方向で見て、目的箇所6に取り付けた第2磁石23の極性に対して逆に設定され、第2磁石23の磁力が第1磁石19の磁力よりも強く設定してある。部品1が目的箇所へ接近すると、前記磁石によって部品に吸引力と反発力が同時に発生する。
(もっと読む)
斜板式流体機械の組み立て方法および組み立て装置
【課題】ピストン端面のセンタ穴の有無を問わず、斜板式流体機械のシャフトアセンブリの自動組み立てを可能にする。
【解決手段】アセンブリ組み立て装置A1で、斜板3bの外周部に、シュー4を介して複数のピストン2を取り付けたシャフトアセンブリSを組み立てる。この組み立て装置A1は、斜板3bを有するシャフト3を縦軸姿勢で支持するシャフト支持部41と、ガイド部材20と、シュー組み込み機構30と、複数のピストン2を縦軸姿勢で搬送する台車10と、斜板3bの外周部に案内された複数のピストン2を、縦軸姿勢で斜板の円周方向等配位置に保持するピストン保持部41とを有する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
ドライブプレート回転装置
【課題】簡易かつ安価な装置構成で、確実に所望する回転角度を保持しつつ、ドライブプレートを回転させることができるドライブプレート回転装置を提供する。
【解決手段】回転が入力される入力軸2bと、該入力軸2bに入力された回転を減速して出力する出力軸2cと、を備える減速機2と、入力軸2bに回転を入力するための駆動軸3cを備え、該駆動軸3cの回転角度を制御可能に構成される回転駆動装置3と、を備え、エンジン51のクランクシャフト52の一端部(締結ボルト52b)に、ソケット部2dを連結して、回転駆動装置3によって、駆動軸3cを所定の角度で回転させることによって、ドライブプレート55を、所定の角度(例えば60度ごと)で回転させるためのドライブプレート回転装置1であって、減速機2を、出力軸2cに回転を入力しても該出力軸2cおよび入力軸2bが回転しない特性(セルフロック特性)を有する減速機2により構成する。
(もっと読む)
アイドルギア・シャフト組付装置
【課題】潤滑不良による軸受部の焼き付きを防止できるアイドルギア・シャフト組付装置を提供する。
【解決手段】アイドルギア2を保持するアイドルギアセット台3と、シャフト4を保持するシャフト置き台5と、シャフト4を把持するクランパ6を有すると共にクランパ6をシャフト置き台5の位置からアイドルギアセット台3の位置に移動させる移動部7を有しクランパ6で把持したシャフト4をアイドルギア2の軸受部8内に挿入して組み付けるシャフト組付機構9と、シャフト組付機構9に設けられクランパ6がアイドルギアセット台3の位置に移動するとき軸受部8内に挿入される潤滑油塗布ノズル10と、潤滑油塗布ノズル10に接続され潤滑油塗布ノズル10が軸受部8内に挿入されたとき潤滑油塗布ノズル10に所定量の潤滑油を供給する定量油供給部11とを備えたものである。
(もっと読む)
切削部を有するワークの把持装置及び把持方法
【課題】把持されるワークの把持部に切削部がある場合でも、ワークの位置と姿勢のずれを回避し、ワークを正しくセンタリングして把持することができるワークの把持装置及び把持方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ワークを撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、ロボットを制御するロボット制御装置18とを備える。カメラ14により、ハンド12による把持面全体を含むワークの画像5を撮影し(S1)、ロボット制御装置18により、画像5を画像処理して把持面1aに存在する切削部2aを検出し、切削部2a以外の把持面1aを把持するようにハンド12の姿勢を制御してワーク1を把持する。
(もっと読む)
車載用操作パネルの組立方法及び組立装置
【課題】プッシュスイッチの摺動シャフトをその頭部形状とは無関係に車載用操作パネルの孔に効率良く短時間で且つ正確に自動挿入することによって車載用操作パネルの組立性の向上を図ることができる車載用操作パネルの組立方法を提供すること。
【解決手段】摺動シャフト供給部1にて切り出し及び振り分けられた複数の摺動シャフトを圧送部2によって摺動シャフト挿入部3に圧送し、該摺動シャフト挿入部3に圧送された摺動シャフトの軸部を開閉可能なチャックアーム24によって把持して該摺動シャフトを垂直に保持した状態で摺動シャフト挿入部3を車載用操作パネル50の位置まで下降させて摺動シャフトの先端を車載用操作パネル50の孔に挿入した後、チャックアーム24を開いて摺動シャフトの保持を解除し、保持が解除された摺動シャフトを圧力によって車載用操作パネル50の孔に挿入する。
(もっと読む)
バルブスプール組み付け装置
【課題】バルブボディに形成された収容孔の内部をバルブスプールが落下する速度を精度良く制御することが可能であり、ひいてはバルブスプールおよびバルブボディの変形を防止することが可能なバルブスプール組み付け装置を提供する。
【解決手段】バルブボディ1に形成された収容孔2にバルブスプール3を収容する組み付け装置100に、自重で落下するバルブスプール3を収容孔2の開口部に導くフローティングガイド10と、フローティングガイド10に水平方向の振動を付与する加振装置20と、バルブスプール3の先端部が収容孔2の開口部に嵌合する時点を基準時点とし、基準時点以前は第一周波数N1の振動をフローティングガイド10に付与させ、基準時点以後は第二周波数N2の振動をフローティングガイド10に付与させる制御装置151と、を具備した。
(もっと読む)
回転体組付け用治具およびそれを用いた回転体組付け方法
【課題】所定の支持体において回転自在に支持される回転体が、被組付体に対して回転方向の位相を合わせた状態で組み付けられる構成において、位相合わせ作業を無くすことができ、作業性の向上および作業の均一化を図ることができる回転体組付け用治具を提供すること。
【解決手段】所定の支持体において回転自在に支持される回転体を、被組付体に対して、回転体の回転位相を合わせた状態で組み付けるための治具10であって、円柱状の外形を有する本体部11と、本体部11を被組付体に対して所定の姿勢で支持するとともに回転方向について位置決めするための位置決め支持部12と、本体部11の外周面11aにらせん状に形成され、回転体の位置決め支持部12側への移動にともない、回転体を被組付体に対する回転位相が合うように回転させる回転案内部13と、回転体に挿入されるとともに回転案内部13が係合するように回転体を導く挿入部14とを備える。
(もっと読む)
軸部挿入装置
【課題】軸部とワークの孔との位置を確実に合わせることができる軸部挿入装置を提供する。
【解決手段】軸部101と孔212との位置が合っていないときは、ボール22を中心軸M周りに公転させ、ボール22の遠心力により保持部10及びバルブ100を中心軸Mと直交する方向で円運動させる。これにより、軸部101の下端部がワーク200の端面上で円運動し、軸部101の端部とワークの孔212との位置を合わせることができる。
(もっと読む)
部品組付装置
【課題】エネルギー資源を消費せず、設備全体がより小型で済む部品組付装置を提供する。
【解決手段】ワークWを支持可能なワーク支持部12を組付位置に移動させるワーク供給機構6と、部品マガジン13から一つのリング状部品Pを組付位置Aに送り込む部品供給機構7と、組付位置AにおいてワークWにリング状部品Pを装着する部品装着機構8と、単一のハンドルHを変位させる操作に基づいて、ワーク供給機構6によるワーク支持部12の移動と、部品供給機構7によるリング状部品Pの送り込みと、部品装着機構8によるリング状部品Pの装着とを完結させる運動変換機構35,36,50とを設けた。
(もっと読む)
部品チャック装置
【課題】被組付け物内の空気を吸引しながら、チャックした部品を組み付ける部品チャック装置を提供する。
【解決手段】チャックベースと、チャックベースに垂下するように固定されたケーシングと、前記ケーシング内であって、前記チャックベースの中心部に固定されたノズルと、前記ケーシングの内周面と前記ノズルの外周面の間に形成された環状中空部に摺動可能に弾装されたガイドとを具備する部品チャック装置において、前記ガイドには、前記環状中空部に連通し、前記ガイドの下端部に開放口を有する連通部が設けられており、該連通部は、組付け時吸引用の吸引源に連通し、さらに、前記ノズルには、部品チャック用の吸引源と連通しノズル下面に開放口を有する吸引穴が貫通し、円筒状部品を前記ノズル下面に吸着保持可能としたことを特徴とする。
(もっと読む)
油圧式クラッチ操作装置の組み付け補助具
【課題】筒形の油圧式クラッチ操作装置4を、変速機2の入力軸6の外径側に組み付ける際に用いる組み付け補助具10において、油圧式クラッチ操作装置4を組み付け場所に適正な姿勢でかつ不動に配置させて、組み付け作業を簡単かつ正確に行えるようにサポート可能とする。
【解決手段】油圧式クラッチ操作装置4は、レリーズベアリング44と、油圧シリンダ(41〜43)とを含む。組み付け補助具10は、油圧シリンダの内径面(42の内周面)と入力軸6の外周面との間の環状隙間に、軸方向から着脱可能に嵌合される厚みの筒状部11を有し、変速機ケース21に油圧式クラッチ操作装置4を当接させた状態において入力軸6に対する油圧式クラッチ操作装置4の軸方向ならびに径方向の変位を規制する規制手段51を有している。
(もっと読む)
嵌合の詰まり状態を修正する嵌合装置
【課題】嵌合ワークの姿勢を被嵌合ワークに嵌合可能になるように短時間で適切に修正する。
【解決手段】ロボットにより把持される嵌合ワーク(60)を、力制御によって被嵌合ワーク(50)に嵌合する嵌合装置(10)は、嵌合ワークの制御点に働く力とモーメントとを検出する力検出手段(3)と、嵌合時に、嵌合ワークと被嵌合ワークとの間に詰まりが生じているか否かを判定する判定手段(12)と、判定手段により詰まりが生じていると判定された場合には、嵌合ワークが被嵌合ワークに進入した距離に応じて制御点の位置を変更して、嵌合方向に対して垂直な方向において嵌合ワークを被嵌合ワークに押付け、それにより、変更後の前記制御点に基づいて前記嵌合ワークの姿勢を修正する変更手段(13)とを具備する。
(もっと読む)
1 - 20 / 45
[ Back to top ]