
Fターム[3C030BB11]の内容
Fターム[3C030BB11]の下位に属するFターム
スリーブ、ブッシュ (9)
Oリング、オイルシール (34)
円型、α型クリップ (18)
C型クリップ、E型クリップ (29)
ピストンリング (22)
Fターム[3C030BB11]に分類される特許
1 - 20 / 37
パーツフィーダ及びパーツの供給方法
【課題】ゴム栓挿入装置の設備費を低減すること。
【解決手段】複数のパーツ50を供給するパーツフィーダ1は、複数のパーツ50を姿勢を揃えて並べた状態で、充填可能なパーツ充填路としてのチューブ部材40に形成された内部通路を有するパーツ供給部材を備え、チューブ部材40に形成された内部通路を有するパーツ供給部材の少なくとも一方側の開口40aが、複数のパーツ50を、それらの姿勢を一定に維持したまま通過可能に形成されている。
(もっと読む)
バルブ部品組み付け用治具

【課題】簡単な構造及び操作により前記誤組み付けの問題を回避できるバルブ部品組み付け用治具を提供すること。
【解決手段】スプール穴4dの内径より小径で、正規のスプリング9の内径より大径の外径を有し、スプリング9の端面9aに当接する座面11cを有する棒状の治具本体11aと、該治具本体11aに前記座面11cの反対側に延びるように形成され、該治具本体11aに押し付け力を作用させる押圧部11bとを有し、前記治具本体11aの座面11cには、キー孔4eと連通可能のキー溝11dが形成され、前記治具本体11aの軸芯部には、前記正規のスプリング9より小径の非正規のスプリング19の外径より大径の逃げ孔11eが形成されている治具11。
(もっと読む)
圧縮ばねハンドリング装置
【課題】
サイズが異なる複数の圧縮ばねを取り扱う事が可能な圧縮ばねハンドリング装置を提供すること。
【解決手段】
本発明に係る圧縮ばねハンドリング装置は、圧縮ばねを圧縮方向に挟持する開閉自在な対となった挟持爪を有する挟持爪ユニットと、前記挟持爪それぞれに対応して設けられ、前記挟持爪と一緒に移動すると共に圧縮ばねを挟持した状態において挟持爪と当接している圧縮ばねの端部を押し、挟持された圧縮ばねを前記挟持爪ユニットから押し出すプッシャーと、各前記プッシャーを押出方向に同期駆動する押出駆動部と、から構成されている。
(もっと読む)
ロボットシステム及び物品加工方法並びに工業製品の製造方法
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
Oリング嵌入装置
【課題】リング収容溝の形状によらず、簡単に且つ確実にOリングを嵌入することが可能なOリング嵌入装置の提供。
【解決手段】制御ユニットは、外側ガイド面35を待避位置からガイド位置へ移動させるガイドスリット形成処理と、圧入ガイド38を待避位置から圧入位置へ移動させる嵌入処理とを連続的に実行する。ガイドスリット形成処理では、初期状態で内側ガイド面29の外側に巻回されたOリング3が、外側ガイド面25と内側ガイド面29との間のガイドスリット36内に収容される。嵌入処理では、ガイドスリット36内に収容されたOリング3が、上昇する圧入ガイド38によって押圧され、作業位置に保持された被組付部品1のリング収容溝に嵌入される。
(もっと読む)
ツマミカバー装着装置
【課題】円柱状のツマミ本体の側面に、中空で弾性部材からなるカバーを装着する際に、カバーを指先で拡径させながらツマミ本体に装着する作業を、ワンタッチで行える作業性の優れた装着装置を提供すること。
【解決手段】本発明に係るツマミカバー装着装置は、ツマミ本体を保持する第1保持手段と、第1保持手段に保持されたツマミ本体に対向する状態でカバーを保持する第2保持手段と、第1保持手段と第2保持手段を相対的に近づけて、第1保持手段に保持されたツマミ本体の頭部を、第2保持手段に保持されたカバーの中空部を拡径させつつ押し込むように相対的に移動させる移動手段と、を備えるとともに、第2保持手段には、カバーの中空部に配置可能な凸部材を第1保持手段側へ付勢して配設し、ツマミ本体の頭部が押しこまれたときには凸部材が後退可能なように構成するとともに、カバーを支持する支持部材を第2保持手段に固定して設け、ツマミ本体の頭部がカバーの中空部に押しこまれたときにカバーの後退を阻止するように構成した。
(もっと読む)
CVTベルト組立装置およびCVTベルトの組立方法
【課題】組立不良や部品の傷つきを発生させることなく、容易にCVTベルトの組立作業の自動化を実現することができるCVTベルトの組立装置およびCVTベルトの組立方法を提供する。
【解決手段】CVTベルト組立装置1は、積層リング保持手段たるリング保持部7eおよび積層リング保持装置10と、エレメント組立体保持手段たる下部治具6と、エレメント組立体整列手段たる上部治具7と、ボディー部2aと積層リング3の内周面のクリアランスaを形成する第一クリアランス形成手段たる上部治具7および上部治具変位装置8と、ヘッド部2bと積層リング3のクリアランスbを形成する第二クリアランス形成手段たる積層リング変位装置9と、ヘッド部2bと積層リング3の外周面のクリアランスcを形成する第三クリアランス形成手段たる上部治具7および上部治具変位装置8と、を備える。
(もっと読む)
クランプ押さえ装置
【課題】ブーツとシャフトの圧入組付けを自動化し得るようにしたクランプ押さえ装置を提供する。
【解決手段】クランプ押さえ装置1は、小クランプK1に当接するクランプ押さえ部10と、クランプ押さえ部10の押さえ位置と退避位置との間でクランプ押さえ部10を移動可能に保持する移動機構と、クランプ押さえ部10を押さえ位置でロックするためのロック機構と、クランプ押さえ部10のロック機構によるロック状態を解除した後、クランプ押さえ部10を押さえ位置から退避位置まで移動させる単動式エアーシリンダ70とを備える。小クランプK1と共にブーツBをシャフトSに圧入して組付ける際に、クランプ押さえ装置1により小クランプK1の脱落を防止することができるので、ブーツBとシャフトSの圧入組付けの自動化を実現することができる。
(もっと読む)
弾性部材の装着装置、および装着方法
【課題】筐体に取り付けられたシャフトに弾性部材をドーム状に装着する作業を簡略化すること。
【解決手段】本発明に係る弾性部材の装着装置は、所定の位置に設置された筐体のシャフトの中心軸の延長線上に配設された保持筒に、内径が弾性部材の外径より小径に形成された外筒と、この外筒内で中心軸に沿って移動可能に配設された部材押し出し部とを備えることによって、部材設置部に設置した弾性部材を、ドーム状に変形させた状態で保持筒の外筒内に移しかえて保持させた後に、保持筒移動部を装着位置に移動させて、外筒内に保持された弾性部材の周縁を筐体の凹部に押しこむように構成した。
(もっと読む)
金属板の挿入方法、挿入装置及び組立品の製造方法
【課題】弾性があるため所定形状に曲げ加工をした後も一部復元して形状ばらつきがある金属板を、位置決めして他部品に自動挿入する方法を提供する。
【解決手段】所定形状に曲げ加工された金属板2を、成形品の溝内へ、以下の工程を経て挿入する。(1)金属板2を、金属板にその両側から近接して来る一対のチャック爪3で把持してチャックし、当該チャックは前記所定形状を保持するために必要とする複数箇所で行う。(2)前記で保持された金属板2を、金属板を挟んでその一方の側は成形品の溝相当位置に位置決め固定され他方の側は前記一方の側に近接して来るこれら2種で一対のチャック爪4,4’で把持してチャックし、当該チャックは前記所定形状を保持するために必要とする複数箇所で行う。(3)前記チャック後に(1)のチャックを解放する。(4)その後、(2)のチャックで所定形状を保持した金属板を成形品の溝内へ挿入する。
(もっと読む)
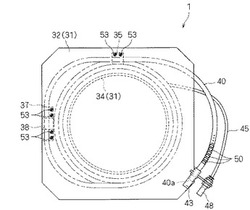
圧力調整弁の組立方法およびこれに用いるセット治具
【課題】圧力調整弁を簡単且つ精度良く組み立てることができる圧力調整弁の組立方法およびこれに用いるセット治具を提供する。
【解決手段】第1治具50に押えリングおよび受圧膜体11を装着した後、第1治具50に第2治具60を装着する準備工程と、2つのネジ孔38に2本の装着ピン52を挿通して、リング状端面35に第1治具50を装着する治具装着工程と、残余の複数のネジ孔38に対応する複数の取付けネジ37を仮締めして、受圧膜体11および押えリング13をリング状端面35に仮固定するネジ仮締め工程と、第1治具50から2個の第2治具60を離脱させる第2治具60取外し工程と、押えリング13および受圧膜体11を残して、第1治具50をリング状端面35から引抜く第1治具50取外し工程と、全ての取付けネジ37を本締めして、受圧膜体11および押えリング13をリング状端面35に固定するネジ本締め工程と、を備える。
(もっと読む)
部品装着装置
【課題】ガスケット等の弾性変形可能なリング状部品をねじれることなく、正しい状態で被装着部に対し自動的に装着することができる部品装着装置を提供する。
【解決手段】押出しプレート53の先端部が弾性変形して拡径しているガスケット111の上面に当接して、押出しプレート53がガスケット111を下方へ押す。押出しプレート53はガスケット111を更に下方へ押し、本体部103の凸部107を通過させる。このときガスケット111の内面はランプソケット101の凸部107の外面に接触しない大きさに拡径しているため、ガスケット111は凸部107の外面には殆ど接触しないで凸部107を通過する。凸部107を通過すると、ガスケット111は自己の弾性力によって縮径して、被装着部109に装着される。ガスケット111は凸部107の外面には殆ど接触しないで凸部107を通過するので、ガスケット111がねじれてしまうことない。
(もっと読む)
組付装置
【課題】ワークを被組付部材に組み付ける機構が複雑でなく、ワークを被組付部材に組み付ける際にもワークの湾曲面に傷が生じない、組付装置を提供する。
【解決手段】ワーク2の一端部2aに当接しつつワーク2の中央部2bを吸着しながら、被組付部材3の湾曲部3bにワーク2を挿入するワーク吸着手段10と、アクチュエータ5に取り付けられ、傾斜面21aを有する押圧部21でワーク2の他端部2cを押圧するワーク押圧手段20と、ワーク2の一端部2a及び中央部2bが被組付部材3の湾曲部3bに挿入しかつワーク2の他端部2cがその湾曲部3bに入り込んでいない状態において、被組付部材3の湾曲部3bに入り込んでいないワーク2の他端部2cをワーク押圧手段20が押圧可能に、ワーク吸着手段10をワーク押圧手段20に連結する連結手段30と、を備える。
(もっと読む)
金属触媒担体の製造装置
【課題】 ハニカム体を外筒へ良好に圧入した状態で収容できると同時に、装置の耐久性を向上できる金属触媒担体の製造装置の提供。
【解決手段】 圧入ガイド19のテーパ面(第2案内孔19d)に、ハニカム体2の外周に内側へ窪んだ溝2aを形成可能な突部19eを設け、スライド片24の外周における突部19eと対応する位置に、該スライド片24と突部19eとの接触を回避可能な逃げ溝27を設けた。
(もっと読む)
自動車用ウエザストリップ組付け治具及び組付け方法
【課題】ウエザストリップを簡単な治具で容易にフランジに取付けられる組付け治具と組付け方法を提供する。
【解決手段】自動車用ウエザストリップの組付け治具において、組付け治具20は、上辺フレーム26、車外側フレーム27と車内側フレーム30から構成されるコ字形のフレームを有する。車外側フレームの上部の内面に上部押えローラー23を設け、車外側フレームの下部には、フランジガイドローラー24とワーク送りローラー25を設ける。車内側フレームの先端部分には、ウエザストリップ10の車内側側壁12の先端に当接して車内側側壁を車内方向に撓ませる開口用ローラー31を設け、開口用ローラー31の後部に車内側側壁をフランジ側に押える側壁押えローラー34を設けたことを特徴とする自動車用ウエザストリップ組付け治具及び組付け方法である。
(もっと読む)
シール組み付け装置及びシール組み付け方法
【課題】被組み付け部材の環状溝にシールリングを容易に組み付けることができて、組み付け時間を短縮することができるシール組み付け装置を提供する。
【解決手段】固定型22の外周面にシールリング11のシール部11aの内周面と対応する形状の保持面22aを形成する。固定型22の保持面22aと対応する位置にシールリング11を位置決めするために、複数の位置決めピン23を設ける。固定型22の外周には、複数の可動型24を接近離間可能に対向配置する。各可動型24の内側面には、シールリング11のシール部11aの外周面と対応する形状の保持面24aを形成する。固定型22の保持面22aと各可動型24の保持面24aとの間でシールリング11のシール部11aを保持した状態で、シールリング11の取付部11bをシリンダヘッドカバーの環状溝に組み付ける。
(もっと読む)
コッタ組付装置
【課題】コッタ開きをコッタに挿入するに際して、スムーズにコッタを開かせて挿入することができるコッタ組付装置を提供することを目的とする。
【解決手段】本発明に係るコッタ組付装置1は、コッタ40を開かせるコッタ開き14を具備するコッタ組付装置10であって、コッタ開き14の先端部が、コッタ40の内周と当接し、且つ互いに離間して3以上設けられた第1の部分と、隣接する第1の部分の間に配置され、コッタ開き14の中心軸と垂直な断面における側面から中心軸までの径方向の長さが第1の部分よりも短い第2の部分と、を含むものである。
(もっと読む)
部品分離装置およびそれを用いた部品供給装置
【課題】互いにくっついた状態で搬送されてくる部品を確実に分離してスムーズに下流側へ送り出せる部品分離装置を提供することである。
【解決手段】部品分離装置9の回転軸15の外周面に取り付けられて、搬送されてくる部品Pを押圧する鍔状の押圧部材16を、スポンジ状の弾性体またはウレタンゴム等の樹脂で形成することにより、押圧部材16の弾性復元を緩やかにして、押圧部材16と部品Pとの間に生じる接触圧で互いにくっついた状態で搬送されてくる部品Pを確実に分離するとともに、押圧部材16の回転力で分離された部品Pを弾き飛ばすことなくスムーズに下流側へ送り出せるようにしたのである。
(もっと読む)
ロボットハンド
【課題】障害物があっても組付部に被組付体を組み付け可能なロボットハンドを提供する。
【解決手段】組付部と障害物との間の空間内で被組付体27を組付部に組み付けるロボットハンドであって、少なくとも2つの把持部材を相対的にスライド移動して開閉することにより、被組付体27を2つの把持部材で把持するハンド3と、ハンド3を動かして被組付体27を組付部に組み付けるアームと、を備え、アームは、ハンド3に把持された被組付体27を組付部に組み付ける際、ハンド3の2つの把持部材の開閉方向が、被組付体27を空間内に挿入する際の挿入方向と略平行になるようにハンド3の姿勢を制御し、被組付体27を組付部に組み付ける。
(もっと読む)
バルブ組立用治具
【課題】増締めや分解時に部品に傷を付けず、組み付け寸法等のばらつきを低減し、且つ作業の迅速化に寄与する治具の実現。
【解決手段】容器の注入口に当接して液体を注入するバルブユニット10のバルブ開口部に対し、弁部材17の組付又は分解を行うためのバルブ組立用治具であって、バルブ本体11を治具本体41,42に位置決めして固定するクランプ部43,44と、弁部材の上端面に係合するように弁部材の上端面の形状に対応した形状部を有するアダプタ60と、アダプタを弁部材の上端面に押圧するよう鉛直軸方向に移動可能な押圧部と、を有し、押圧部は、鉛直上方に付勢されると共に鉛直軸方向に移動可能な軸部51と、軸部を鉛直下方に移動するように操作するハンドル部53と、前記ハンドル部の操作により前記アダプタが弁部材の上端面を押圧した状態を保持するように前記軸部を鉛直軸まわりに回転可能に固定させる固定部54と、を有する。
(もっと読む)
1 - 20 / 37
[ Back to top ]