
Fターム[3C030BC15]の内容
Fターム[3C030BC15]の下位に属するFターム
多関節型ロボットによるもの (211)
Fターム[3C030BC15]に分類される特許
1 - 20 / 56
部品挿入装置及び方法
ピックアップユニット
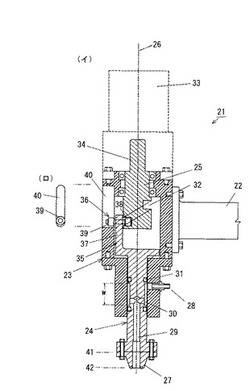
【課題】小型化が容易で起動時、停止時の慣性が小さく、ピックアップ作動を高速に、かつ、正確に行え、作動が俊敏なピックアップユニットの提供。
【解決手段】機体23に設定した1本の主軸線26に沿ってスライド軸24と円筒溝カム25を配置する。スライド軸24は上下方向で移動可能であり下端部に吸着ノズル27を備える。スライド軸24と円筒溝カム25とが、円筒溝カム25に案内されるカムフォロア36を有するジョイント部35により結合される。カムフォロア36は円筒溝カム25の周面に設けたカム溝32に一端が案内されると共に、他端が前記機体23に主軸線方向へ設けた直線ガイド孔40に案内されている。
(もっと読む)
電池パックの組立治具

【課題】従来の組立装置では取り扱うことが難しい小規模な電池パックを、効率よく組み立てることができる簡易な組立治具を提供する。
【解決手段】本発明の一実施形態に係る組立治具1は、スタックアッシー23を挟圧して保持するクランプ部材6・6と、スタックアッシー23に対して位置決めした電池ケースを構成するロアケース24を係止する係止部たる爪部8・8・・・と、を備える把持部4と、把持部4を支持する、該把持部4の基準面(本実施形態では水平面(上面部2a))に対する傾斜角度を変更可能な支持アーム3と、把持部4を前記傾斜角度で傾斜された面上で回転可能に支持する回転機構7と、を備える。
(もっと読む)
位置検出装置、部品組立装置、および部品組立方法
【課題】より高い精度で部品等の位置を検出することができる位置検出装置を得る。
【解決手段】部品20の位置を検出する位置検出装置50は、表面11および裏面12を含むベース部材10と、ベース部材10の裏面12側に配置される撮像カメラ40と、を備え、部品20は、表面11に対して間隔Sを空けて配置され、撮像カメラ40は、部品20の外縁20Eに沿いつつ表面11側から裏面12側に向かってベース部材10を透過した光40Lを読み取ることによって、部品20の位置を検出し、上記の間隔Sは、撮像カメラ40が部品20の位置を検出する際に、部品20の外縁20Eが撮像カメラ40の被写界深度40R内に位置し且つベース部材10の表面11が撮像カメラ40の被写界深度40R外に位置するように設けられる。
(もっと読む)
部品供給装置および組立システム
【課題】組立システム全体の設置面積の増大を抑える。
【解決手段】組立作業を行う組立ロボット1に組立用部品8を供給するための部品供給装置2は、組立用部品8が載置された複数のトレイ7が収納される収納棚と、収納棚の上面に形成され、組立ロボット1による組立用部品8の組立作業が行われる組立部20と、収納棚からトレイ7を取り出して組立部20に搬送する搬送手段40とを備える。搬送手段40は、トレイ7を支持するトレイ支持部と、トレイ支持部を水平方向に移動する水平移動機構と、トレイ支持部を鉛直方向に移動する鉛直移動機構とを有する。
(もっと読む)
組立て装置
本発明は、車両ボディ(14)を加工するための産業ロボット(24)を備える組立て装置(20)に関する。この産業ロボット(24)は、車両ボディ(14)に接続することによって、コンベヤベルト(12、18)が車両ボディ(14)を送る搬送方向(16)に一緒に移動することができる。この産業ロボットは、どのような搬送状況においても、全ての方向でワークピースに対して正確な位置を保っている。輸送プラットフォーム(22)は産業ロボット(24)の輸送に用いられ、産業ロボット(24)が車両ボディ(14)から連結解除されている場合、この輸送プラットフォーム(22)は搬送装置(12、18)とは無関係に、レール接続なしに移動可能である。好ましくは、輸送プラットフォーム(22)に構成部品リザーバを接続することができ、それによってこの構成部品リザーバは輸送プラットフォーム(22)によって一緒に動かされる。この産業ロボット(24)は特に小さな積載量で設計できることから、低コストの組立て装置(20)が実現可能である。 (もっと読む)
回転抑制装置および回転抑制方法
【課題】簡易な構成で2つの締付部材が供回りするのを防止できる回転抑制装置を提供すること。
【解決手段】回転抑制装置70は、左フォーク11Bの挿通孔111にアクスル15を挿通し、このアクスル15の先端にナット152を螺合させる際に、アクスル15またはナット152の回転を抑制する。この回転抑制装置70は、左フォーク11Bの外周面に当接する外周面当接部723と、左フォーク11Bの挿通孔111近傍に当接する先端当接部713と、アクスル15およびナット152のうち一方に嵌合可能なソケット731と、ソケット731が中心軸を回転軸として先端当接部713に対して回転するのを抑制しつつ、ソケット731を中心軸に沿って先端当接部713に対して進退させるスライド部72および移動部74と、を備える。
(もっと読む)
位置姿勢計測装置、およびワーク搬送組立装置
【課題】
計測対象物の色や光沢に左右されることなく、計測対象物を撮像した画像における計測対象物と背景とのコントラストの差を簡易な構成で確実に大きくし、計測対象物の位置および姿勢を高精度に計測すること。
【解決手段】
計測対象物を撮像するカメラと、カメラ側から計測対象物に向けて発光する第1照明と、前記計測対象物を挟んで前記第1照明と反対側に設けられた第2照明と、計測対象物の輪郭より大きな開口部を備え、遮光部材によって第2照明を覆うカバーと、第1照明の点灯および消灯を制御する第1照明制御部と前記第2照明の点灯および消灯を制御する第2照明制御部と撮像画像に基づいて画像処理により、計測対象物の位置および姿勢を計測する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させず、凸部の凹部への挿入を短時間で完了でき、ロボットアームの可搬重量や可動範囲が制限されない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102を保持する保持台4と、保持台4に設けられロボットアーム1が凹部103に凸部を有する部品102を挿入させるとき凹部を有する部品101又は凸部を有する部品102が受けるモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5aと、保持台4を挿入方向に直交する方向に移動可能に支持する受動機構5bとを備え、凹部103に凸部を有する部品102を挿入させるとき、保持台4に固定された部品が受ける挿入方向の並進力により受動機構5bが変位し、検出されたモーメントに基づきアクチュエータ5aにより保持台4を移動操作する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させることなく、凸部の凹部への挿入を短時間で完了することができ、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して移動操作し凹部103に凸部が設けられた部品102の凸部を挿入させるロボットアーム1と、凸部が設けられた部品102を保持する保持台と、保持台4に設けられ凹部103に凸部を挿入させようとしたときに凹部を有する部品101または凸部が設けられた部品102が受ける並進力及び/又はこれらの軸周りのモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5とを備え、力覚センサ2により検出された並進力及び/又はモーメントに基づき、凸部の先端部の当接位置の凹部103の中心からの方向及び距離を算出し、これらに応じて保持台4を移動操作し、凸部を凹部103に挿入させる。
(もっと読む)
組立装置
【課題】部材の移動操作の精度を特段に向上させる必要を生ずることなく、凸部を有する部材の凹部への挿入を短時間で完了することができ、さらに、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101または凸部を有する部品102を把持して移動操作し凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102または凹部を有する部品101を保持する保持台4と、保持台4を挿入方向に直交する方向及び/又は挿入方向に直交する軸周りの回転方向に移動可能に支持する受動機構5とを備え、ロボットアーム1が凹部103に凸部を挿入させようとしたときに、保持台4に固定された部材が受ける挿入方向の並進力及び/又はこれに直交する軸周りのモーメントにより受動機構5が変位され、凸部を有する部品102の凸部が凹部103に挿入される。
(もっと読む)
フロントフォークアッセンブリ組立方法
【課題】構成部品同士の回転方向の位相を確実に調整できるアッセンブリの組立て方法を提供すること。
【解決手段】フロントフォークアッセンブリ組立方法では、右フォーク11Aおよびホイール13が把持装置に対して従回動可能となるように、ホイール13を把持する工程と、ブレーキパネル14に対するホイール13の回転方向の位相を調整する工程と、ホイール13をブレーキパネル14の上方に仮置きし、その後、ホイール13の把持装置に対する従回動を解除する工程と、右フォーク11Aのブレーキパネル14に対する回転方向の位相を調整する工程と、把持装置を下降させて、把持部でブレーキパネル14を把持し、その後、ブレーキパネル14を上昇させて、再び、ホイール13が把持装置に対して従回動可能となるようにする工程と、右フォーク11Aの左フォーク11Bに対する回転方向の位相を調整する工程と、を備える。
(もっと読む)
作業装置
【課題】1の機械で複数の作業を行うラインの効率を高める。
【解決手段】組立装置1では、ベルト11〜17が環状の循環型コンベヤを形成しており、ワークは、パレット71の上に置かれてベルト11〜17を反時計方向に周回する。パレット71は、最初はベルト12に置かれ、ベルト11〜17を2周した後、これらベルトのループから排出されてベルト18に蓄積される。チャック部23は、横方向に移動し、機械作業エリア61、62で、部品の取り付けなどの機械作業を行うことができる。組立装置1は、機械作業エリア61、62において、それぞれ、センサ26、27でピン72が立っているか否かを確認し、これによって、パレット71が1周目なのか、あるいは2周目なのかを判断する。この判断により、組立装置1は、1周目の場合は、1周目用の作業を行い、2周目の場合には、2周目用の作業を行うことができる。
(もっと読む)
組み立て作業ロボットの制御方法
【課題】探索動作中のワークの引っかかりを防止し、挿入位置の縁に凹凸部があってもワークを対象物上の挿入位置へ挿入することができる組み立て作業ロボットの制御方法を提供する。
【解決手段】ロボット1002が把持したワーク201を対象物202に押し当てた状態で対象物202上を移動させ、対象物202に設けられた挿入位置203を探索し、ワーク201を挿入位置203へ挿入する組み立て作業ロボットの制御方法において、
挿入位置203を探索する際に、探索進行方向のワーク端を持上げ、ワーク201を対象物202に対して予め設定された傾斜角306で傾斜させる。
(もっと読む)
吸着装置および吸着方法
【課題】吸着パッドに生じた摩耗や位置ずれを自動的に検知する吸着装置を提供する。
【解決手段】吸着パッド10の基準位置L0における吸着力F1を吸着センサ30が測定し、測定された吸着力F1が閾値THより小さいと判定部42が判定した場合には、駆動部20が吸着パッド10を昇降方向または交差方向に所定の変位量を変位させ、変位した位置(変位位置LD)における吸着パッド10の吸着力F2を吸着センサ30が測定するとともに、吸着力F2が閾値THより大きいと判定部42が判定した場合の変位量ΔLを取得する機能を有する制御部40を備える吸着装置100。
(もっと読む)
ワーク把持装置、および、これを用いたアッセンブリの組立て方法
【課題】複数の部品が積層されて構成されるアッセンブリについて、省スペースで効率的に組み立てできるワーク把持装置を提供すること。
【解決手段】把持装置30は、基部31と、この基部31に設けられて所定方向に延出し先端に第1の駒421を有する円筒状のガイド部42と、このガイド部42の同軸上に設けられた円筒状のコレット43と、ガイド部42およびコレット43に挿通されて、先端に第2の駒441を有する棒状のシャフト部44と、ガイド部42とシャフト部44とを相対移動させることにより、駒421、441同士を接近または離隔させるアクチュエータ41と、基部31に設けられて所定方向に進退可能でありかつ先端がワークに係止可能な係止部50と、を備え、第1の駒421および第2の駒441の外径は、コレット43側では、コレット43の内径よりも小さく、コレット43の反対側では、コレット43の内径よりも大きい。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
生産装置及び生産システム
【課題】投入搬出口から作業室内に搬入された作業ユニットを装置内で容易に移動させること。
【解決手段】箱状の装置本体と、装置本体を、下側の作業準備室2と、上側の作業室とに仕切る平板状の隔壁部材と、作業準備室の内部から隔壁部材の位置まで昇降可能な可動床部8と、作業準備室内に設けられ、可動床部を昇降させる昇降機構と、可動床部に対して着脱可能に設けられ、作業を行う作業ユニットと、作業ユニットを作業準備室内に対して出し入れするために、作業準備室を外部と仕切る側壁部2a、2b、2c、2dに設けられた投入排出口22と、作業準備室内において、投入排出口と昇降機構により下降された可動床部との間の平面領域内で、作業ユニットの下面に駆動力を付勢して、作業ユニットを少なくとも2方向に搬送する搬送機構24と、を備える生産装置を提供する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】左右のキャンバ角の差分を極力低減しつつ、サスペンションアッセンブリをボディに取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】アッセンブリ取り付け方法は、ダンパ取付孔13L,13Rの位置BL,BRを測定し、ボディ10の中心位置BCを算出する手順と、サブフレーム基準穴26L,26Rの位置SL,SRを測定し、サスペンションアッセンブリ20の中心位置SCを算出する手順と、中心位置BCと中心位置SCとが一致するように、ボディ10にサスペンションアッセンブリ20を取り付ける手順とを備える。ボディ10にサスペンションアッセンブリ20を取り付ける手順では、サスペンションアッセンブリ20のサブフレーム21をボディ10に固定するとともに、ダンパアッセンブリ24L,24Rの上端側をダンパハウジング12L,12Rに固定する。
(もっと読む)
被挿入物の把持・挿入装置および被挿入物の把持・挿入方法
【課題】 被挿入物を挿入孔に軸心を揃えて挿入するに際して、種々の大きさの被挿入物に対応することができ、簡単な構造により、短時間に、作業能率よく挿入することができる被挿入物の把持・挿入装置を提供する。
【解決手段】 被挿入物を把持して挿入孔に軸心を揃えて挿入するために使用される被挿入物の把持・挿入装置60が、3本以上の把持指65を有し、これらの把持指65は、円周方向に間隔を置いて配置されて、放射方向に進退可能にされ、把持指65の内側面は、被挿入物を把持する把持面とされ、把持指65の外側面は、少なくともその先端部に先端に行くに従い内方に向かうテーパが付されて、挿入孔の入口に接触可能にされ、被挿入物把持・挿入装置60の位置を挿入孔の位置にならわせて修正するならい機構を備えている。
(もっと読む)
1 - 20 / 56
[ Back to top ]