
Fターム[3C030BC21]の内容
Fターム[3C030BC21]の下位に属するFターム
振動を発生させるもの (18)
保持手段が微少傾動 (24)
保持手段が平面上を微小移動 (96)
装着対象物品が微少移動 (23)
Fターム[3C030BC21]に分類される特許
1 - 20 / 94
部品挿入装置及び方法
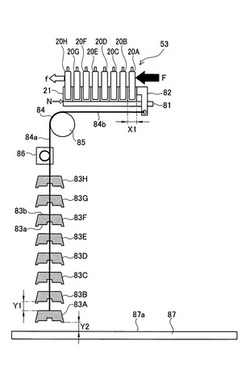
電池組付け装置
【課題】電池把持手段(把持治具)が的確にワークを把持できるように、並べられた複数個のワークを適切な力で押圧することができる電池組付け装置を提供すること。
【解決手段】電池組付け装置40は、電池供給部53から供給される電池20を把持する把持治具52を備え、電池20と枠体30を組付けるものである。電池供給部53は、ワーク20(電池20)を水平方向に複数個並べて配置する搬送路81と、搬送路81に並べられた複数のワーク20のうち一端側のワーク20Aを押圧して他端側のワーク20Hを把持治具52へ水平方向に供給する押圧部材82と、重力により落下する所定重量の錘83A〜83Hと、錘83A〜83Hに作用する重力を押圧部材82に伝達するロープ84を有する。各錘83A〜83Hは、鉛直方向に所定距離Y1ずつ離れて設けられ、落下に伴い下側から順次接地して押圧部材82に作用する力を順次減少できるように配置されている。
(もっと読む)
電池組付け装置

【課題】電池と枠体とを高精度に組付け生産性の高い電池組付け装置を提供すること。
【解決手段】一端側を中心にして他端側端部が同一円周上を回転する回転アーム21,31および、電池2又は枠体3を把持して回転アーム21,31の他端側端部に揺動可能にピン結合された先端治具22,32を備え、先端治具22,32が回転アーム21,31に対して回転方向に所定角度傾くように伸縮可能な弾性部材23,33によって連結された電池組付け手段11および枠体組付け手段12と、対になった回転アーム21,31を逆方向に同期して回転させる駆動機構とを有し、電池組付け手段11および枠体組付け手段12は、両方の回転アーム21,31の回転中心を結んだ直線上に移動させた電池2および枠体3に対し、回転アーム21,31と先端治具22,32を介して電池2および枠体3の略中央部にほぼ直交するように押し付け力を作用させる電池組付け装置10。
(もっと読む)
組立ロボットとその制御方法
【課題】ワークを対象物に複数の動作で組み付ける場合に、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができる組立ロボットとその制御方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ハンドに作用する外力を検出する力センサ14と、3次元空間内でハンドの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置18とを備え、(A)各動作における組付け方向の外力の最大値を記憶し、(B)ロボットアーム16を制御して各動作を順次実行し、(C)各動作の実行中に、力センサ14で検出された組付け方向の外力が、各動作における最大値に達したときに、ロボットアーム16を停止する。
(もっと読む)
印字ヘッドのコイル自動挿入装置
【課題】コイルを所定の組付け位置に挿入する際に、一旦姿勢補正機構部により挿入姿勢を補正し、所定の組付け位置に挿入するようにした、印字ヘッドのコイル自動挿入装置を提供する。
【解決手段】姿勢補正機構部27は、コイルトレイ載置待機部25のターンテーブル25t、コイル挿入部26のターンテーブル26t間にあって、基台40上に立設された姿勢補正機構部本体27aと、姿勢補正機構部本体27aに弾発的に退避可能に支持されている補正ヘッド27bと、補正ヘッド27bに突設され、作業ロボット30におけるハンド部30bで把持されたコイルを挿入する複数の姿勢補正用案内突起27b1、27b2とを具備する。
(もっと読む)
プーリアッセンブリー圧入方法、及び、プーリアッセンブリー圧入装置
【課題】ドライブプーリ及びドリブンプーリにベルトを巻き掛けて形成されるアッセンブリーをミッションケースに圧入する際に、ドライブプーリ及びドリブンプーリの軸方向の相対位置がずれないように圧入できるようにする。
【解決手段】入力軸11に装着されるドライブプーリ20と、出力軸12に装着されるドリブンプーリ30と、これらプーリ20,30に巻き掛けられるVベルト13とを有するプーリアッセンブリー15をミッションケース40に圧入するプーリアッセンブリー圧入方法において、入力軸11と出力軸12との軸間距離、及び、Vベルト13の位置を固定治具53で固定するアッセンブリー固定工程と、固定治具53で固定されたプーリアッセンブリー15をミッションケース40に移動し、ミッションケース40に圧入する圧入工程と、固定治具53を取り外す治具取り外し工程とを有する。
(もっと読む)
自動組立装置
【課題】搬送中のワークに部品を組み付けることのできる自動組立装置を提供する。
【解決手段】ワーク12を水平方向に搬送する搬送手段30、31と、搬送手段30、31で搬送されているワーク12の上方へ被挿入部品13を供給する供給手段40、41と、搬送手段30、31で搬送されているワーク12および供給手段40、41で供給された被挿入部品13のうち少なくとも一方を上下方向に移動させる上下駆動手段33とを備え、供給手段40、41は、被挿入部品13をワーク12の搬送方向に取り出すことのできるように開放された開放部413を有し、搬送手段30、31でワーク12を水平方向に搬送しながら上下駆動手段33でワーク12を被挿入部品13に挿入させることで、ワーク12で被挿入部品13を引っ掛けて開放部413から引き出し、開放部413から引き出された被挿入部品13をワーク12に自重落下させる。
(もっと読む)
部品の組立方法および部品の組立装置
【課題】位置合わせと位相合わせとが必要な部品同士の組付け作業を、高度で複雑なセンシング技術を用いることなく、短時間で完了させることを課題とする。
【解決手段】所定の位置および位相にセットされた第1の部品44に、該第1の部品44に対する組付け位置が不定であり且つ該組付け位置に応じた位相でのみ第1の部品44に組付け可能な第2の部品52を組み付ける場合において、第2の部品52の組付け位置Rbを決定し、第2の部品52の組付け位置と第1の部品44の位相と第2の部品52の位相との相関関係に基づいて、組付け位置Rbに応じた第2の部品52の位相Sbを算出し、前記組付け位置Rbにおいて、前記算出された位相Sbで第2の部品52を第1の部品44に組み付ける。
(もっと読む)
部品組立方法および部品組立装置
【課題】部品組立方法および部品組立装置において、挿入部材が被挿入部材の凹部に引っかかりやすい場合にも、効率よく被挿入部材に挿入部材を挿入することができるようにする。
【解決手段】被挿入部材に設けられた凹部に挿入部材を挿入して、被挿入部材および挿入部材を含む部品を組み立てる部品組立方法であって、凹部の開口を上方に向けて被挿入部材の位置を被挿入部材保持部に固定して(ステップS1)、被挿入部材保持部に衝撃を加えることにより、被挿入部材を介して挿入部材に衝撃を加える(ステップS3)方法とする。
(もっと読む)
リテーナコッタ組合せ装置
【課題】コッタとリテーナとが組み合わされたか否かの確認作業が不要であり、サイズ及び製造コストを抑えたリテーナコッタ組合せ装置を提供する。
【解決手段】貫通孔2aを有するリテーナ2と、貫通孔2aに合った形状を成す一対のコッタ3・3と、を組み合わせるリテーナコッタ組合せ装置1であって、リテーナ2及びコッタ3・3を載置する固定盤10と、保持部21が形成され、リテーナ2を搬送する回転盤20と、所定の位置における保持部21にリテーナ2を大径側の表面を下にした状態で供給するリテーナフィーダ30と、リテーナ2の供給位置における保持部21の下方にコッタ3・3を大径側の表面を下にした状態で供給するコッタフィーダ40と、コッタ3・3を持ち上げて貫通孔2aに下方から挿入させるコッタリフタ50と、リテーナ2の供給位置よりも下流側の位置における保持部21にて、組合せ体を上下反転させる反転装置60と、を具備する。
(もっと読む)
ロボットシステム
【課題】嵌合・挿入作業において、様々な原因に依存する作業良否を正確に判定する。
【解決手段】特徴量抽出部113と特徴量履歴記録部114と作業良否・原因入力部115と作業良否・原因履歴記録部116と特徴量存在範囲算出部117と特徴量存在領域記録部123と作業良否判定部118と作業良否・原因表示部119とを備え、特徴量存在範囲算出部117は特徴量履歴記録部114と作業良否・原因履歴記録部116の2つの履歴データから、作業成功時の特徴量の存在範囲と作業失敗時の特徴量存在範囲を失敗原因ごとに算出して、各特徴量の存在領域を特徴量存在領域記録部123に記録し、当該特徴量存在領域に基づいて、作業良否判定部118は特徴量抽出部113から得られる作業実行時の特徴量がどの特徴量存在領域内にあるかによって作業良否と失敗時の原因を判定し、作業良否・原因表示部119はその判定結果を表示する。
(もっと読む)
ガラス調整治具およびガラス調整方法
【課題】車両用サッシュレスドアのドアパネルに組み付けられる窓ガラスの組み付け精度を高めることができるガラス調整治具を提供することを課題とする。
【解決手段】車両用サッシュレスドア1のドアパネル2に組み付けられる窓ガラス3の組み付け位置を調整するためのガラス調整治具20であって、ドアパネル2に取り付けられるフレーム部材30と、ドアパネル2に組み付けられた窓ガラス3の縁部に当接することで、窓ガラス3を位置決めする規制部材50,60を有するガラス位置決め機構40と、を備え、ガラス位置決め機構40は、フレーム部材30に設けられており、フレーム部材30は、ドアパネル2のヒンジ部2a,2aおよびドアロック部2bに係合されることで、ドアパネル2に対して位置決めされる。
(もっと読む)
双腕ロボット
【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
部品位置決め構造
【課題】極めて簡単な構造であって、部品の固定に際して作業者の習熟度に関係なく、高い精度で容易に部品を位置決め可能な部品位置決め構造を提供することを目的とする。
【解決手段】本発明にかかる部品位置決め構造100の代表的な構成は、部品120に設けられ平面110aと対向する所定の端部120aと、部品120に設けられ所定の端部120aに向かって下降するように傾斜した長孔122と、長孔122に挿入されて部品120を回転および摺動可能に支持する支持部材112であって、長孔122の一端から他端までの摺動の間に所定の端部120aが平面110aに接触する位置にある支持部材112と、を備え、重力の作用により部品120が平面110aに接近し、所定の端部120aが平面110aに接触することにより、部品120は平面110aに位置決めされることを特徴とする。
(もっと読む)
力制御装置
【課題】動作中に力制限値とコンプライアンス制御パラメータを切替えることで作業を高速化しながら位置ずれ発生時に過大な力が作用するのを防止した力制御装置を提供する。
【解決手段】切替地点指定手段5からのロボットに行わせる作業動作に従ったロボット先端に作用する力の力制限値およびコンプライアンス制御の力制御パラメータの少なくとも一方を含むパラメータ条件、および上記パラメータ条件に切り替える切替地点を指示する命令に基づいて、パラメータ切替手段6が力制限値および力制御パラメータの少なくとも一方を切り替え、力制限超過判別手段4が力制限値を超える力が作用していると判別した場合に、ロボットに行わせる作業動作に従ってロボットの目標位置を示す位置指令を出力する指令生成手段1にロボットを減速停止させる位置指令を出力させる停止指令を入力する。
(もっと読む)
薄板部材の組付け装置及び組付け方法
【課題】組付け作業性を大幅に向上させるとともに、締まり嵌めでの嵌合を可能とする薄板部材の組付け装置及び組付け方法を提供すること。
【解決手段】電磁鋼板30に形成された有底穴31に改質用チップ20を組み付ける組付け装置10において、合わせ面が略球状に形成され、電磁鋼板30を挟み込む上型11及び下型12と、改質用チップ20を保持し、上型11と下型12とに電磁鋼板30が挟み込まれた状態で、保持した改質用チップ20を有底穴31に配置するチップ保持具13とを設け、上型11の中心にチップ保持具13が通過可能な貫通穴18を形成する。
(もっと読む)
弁コッタ及びリテーナの組付け装置
【課題】弁コッタ及びリテーナの組付け効率及び信頼性を向上させることができ、弁コッタ及びリテーナを組み付けた部品を大量に供給させることができる弁コッタ及びリテーナの組付け装置を提供する。
【解決手段】弁コッタを整列させつつ小径の半円面を下面及び大径の半円面を上面とした状態で且つ外周面を外側に向けて搬送可能とされた弁コッタ搬送手段1と、リテーナを整列させつつ搬送可能なリテーナ搬送手段2と、弁コッタを待機位置にて待機させるべく当該弁コッタを係止可能な係止爪10と、その弁コッタを一組毎に順次切り出して組付位置まで移送する弁コッタ移送手段12と、リテーナを弁コッタ移送手段12における組付位置の下方の位置まで移送するインデックス5と、組付位置の弁コッタをインデックス5で移送されたリテーナの穴部に嵌合させて組付ける組付手段3とを具備した組付け装置である。
(もっと読む)
部品組み付け装置
【課題】簡易でシンプルな機構によって構成され、円筒形中空部品の中空部に対して挿入部品の組み付けを行うことができるとともに、多品種大量生産への対応が可能な部品組み付け装置を提供する。
【解決手段】部品保持凹部24aと、部品保持溝部24bと、が形成されるワーク保持治具24を有する回転ドラム22、を備えるロータリー機構20と、円筒カム31と、挿入ピン32と、からなるカム機構30と、を備え、部品保持凹部24aに保持される円筒形中空部品1に対して、部品保持溝部24bに保持される挿入部品2を、回転ドラム22の回転によって、挿入ピン32がカム連動して該回転ドラム22の軸心方向に往復変位し、挿入ピン32によって、挿入部品2を回転ドラム22の軸心と平行に押圧しつつ、円筒形中空部品1の中空部1aに挿入部品2を挿入して、組み部品3を生成する。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】被組付部をセンシングする回数を低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ組付部にサイドエアバッグを配置し、ねじを用いて、このサイドエアバッグをサイドエアバッグ組付部に固定する。このワーク組付方法は、サイドエアバッグ組付部に近接する部分に設けた3つの測定点を撮影する撮影工程と、この撮影した画像に基づいて、測定点の実際の位置A1〜C1を算出する位置算出工程と、この位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、サイドエアバッグとサイドエアバッグ組付部との相関位置を算出して位置決めする第1位置決め工程と、位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、ねじとサイドエアバッグ組付部との相関位置を算出して位置決めする第2位置決め工程と、を備える。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
1 - 20 / 94
[ Back to top ]