
Fターム[3C030CC00]の内容
自動組立 (6,729) | 輸送機械の組立・分解 (611)
Fターム[3C030CC00]の下位に属するFターム
Fターム[3C030CC00]に分類される特許
1 - 16 / 16
穴開け埋め込み組立における工程内品質管理の方法及びシステム
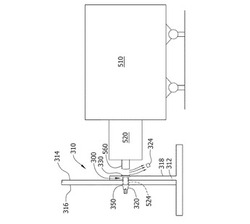
【課題】工程内品質管理に要する時間を短縮する組み立て方法を提供する。
【解決手段】重ね板の組立品において、ワンサイドファスナ300が取り付けられる位置を特定するステップと、その位置で重ね板の組立品を貫通する穴524を開けるステップと、穴に指定された深さの皿穴を開けるステップと、穴及び穴の近傍における重ね板の1つ又は複数に関連するパラメータを少なくとも決定するために、較正されたプローブを操作するステップと、穴にワンサイドファスナを挿入するステップと、ワンサイドファスナの取り付けを完了するために回転トルクをワンサイドファスナに付与するステップと、ワンサイドファスナの取り付けを完了するのに必要とされる角度変位の測定結果をファスナが正しく取り付けられていることを指標する角度変位の範囲と比較するステップとを含む。
(もっと読む)
ギヤ伝動装置の組立及びバックラッシュ測定設備

【課題】ギヤケースに第1及び第2ギヤ等の伝動部品を組み込む組立作業と,第1及び第2ギヤ間のバックラッシュの測定とを一連のコンベア上で行うことを可能にする。
【解決手段】ギヤケース1に,互いに噛合する第1及び第2ギヤを含む伝動部品を組み込む組立作業を行う第1コンベア31と,それの下流端に,第1コンベア31と平行に配列される第3コンベア33を第2コンベア32を介して接続し,第1及び第3コンベア31,33間に,所定の測定位置Cで第1及び第2ギヤ間のバックラッシュを自動的に測定し得るバックラッシュ測定装置35を配設し,このバックラッシュ測定装置35の測定位置と第3コンベア33上の移載位置との間には,伝動部品組み込み済みのギヤケース1の受け渡しを可能にするワーク受け渡し手段を設けた。
(もっと読む)
ローラ組立体の組立方法および組立用治具
【課題】汎用の圧入機でも、ローラの組み付けが効率よく容易に行われるようにすること。
【解決手段】被加工物載置面102に対して直交するZ軸方向に移動する圧入工具106を有する圧入機100の被加工物載置面102上に配置されたアングルブロック114によって、ドライブディスク47Lを、一つの回転位置にある軸受孔51の中心軸線がZ軸方向に一致する傾斜姿勢で、当該ドライブディスク47Lの中心軸線周りに回転可能に支持し、圧入工具106をZ軸方向に移動させて支持軸54Lを前記一つの回転位置にある軸受孔51と当該軸受孔51に合致した中心孔561に押し込む。
(もっと読む)
少なくとも2つのサブアセンブリを3次元的に相互に位置合せする装置及びその方法
本発明は、少なくとも2つの大型のサブアセンブリを相互に組付けて1つのアセンブリを構成するために、より具体的には、例えば、少なくとも1つの胴体側面シェル(7、8)、少なくとも1つの胴体上面シェル(12)、少なくとも1つの胴体下面シェル(11)、及び/または、少なくとも1つの胴体床構造体を相互に組付けて航空機の1つの胴体セクションを構成するために、それら少なくとも2つのサブアセンブリを3次元的に相互に位置合せする装置(1)に関する。本装置は、a)各々が1つずつのサブアセンブリを把持する少なくとも2台のポジショニング装置を備えており、より具体的には、例えば、少なくとも2台の胴体側面シェル用ポジショニング装置(2、3)、少なくとも1台の胴体上面シェル用ポジショニング装置(5)、及び/または、少なくとも1台の胴体下面シェル用ポジショニング装置(4)を備えており、b)測定によって複数の測定データを取得するための、より具体的には、例えば、前記複数のサブアセンブリ及び/または前記複数台のポジショニング装置の位置データを取得するための、少なくとも1つの測定装置を備えており、c)少なくとも1つの制御及び/または調節装置(19)を備えており、より具体的には、例えば、少なくとも1つのCNC制御装置(コンピュータ数値制御装置)を備えており、d)少なくとも1つのニューラルネットワーク(20)を備えている。本発明に従って本装置に備えられているニューラルネットワーク(20)は、前記複数台のポジショニング装置を互いに同時に作動させて、短時間で、しかも高精度で前記複数のサブアセンブリの形状を夫々の所与の目標形状にすることを可能にするものである。また、前記制御及び/または調節装置(19)は、それに続いて、前記複数台のサブアセンブリに互いに同時に直線移動操作を行わせて、前記複数のサブアセンブリを相互に位置合せするものである。本発明は更に、複数のサブアセンブリを位置合せする方法に関する。 (もっと読む)
反転装置
【課題】本発明の目的は、反転対象物を2方向に反転可能な反転装置、反転システム、及び、反転方法を提供することである。
【解決手段】反転装置は、ベース100上を走行するタワー120と、タワー120を昇降するリフター121と、反転対象物を保持する対象物保持部130と、車輪走行ベース110と、対象物保持部130に回転可能に取り付けられた車輪軸137と、車輪軸ロック114とを具備する。車輪軸137は、車輪走行ベース110上を転がる車輪136を備える。対象物保持部130は、車輪軸137に平行な回転軸135を介してリフター121に取り付けられる。車輪軸ロック114は、車輪136が車輪走行ベース110上を転がらないように、且つ、車輪軸137が対象物保持部130に対して回転可能なように車輪軸137をロックする。
(もっと読む)
自律ロボット組立システム
【課題】発生し得る一又は複数の問題を考慮した航空機構造を組立てる方法及び装置を提供する。
【解決手段】複数の可動式ロボット装置、無線通信システム、及び運動制御システムを備える装置である。複数の可動式ロボット装置は、組立現場において幾つかの位置に移動でき、組立現場で構造物の組立作業を行うことができる。無線通信システムは、組立現場での複数の可動式ロボット装置との通信を可能にすることができる。運動制御システムは、組立現場における複数の可動式ロボット装置の位置情報を生成し、位置を通信することが可能であり得る。
(もっと読む)
少なくとも1つの長手方向連結継ぎ目を配置することによってカバー胴体のシェル形状長手方向セグメントを連結する取り付け装置
【課題】長手方向連結継ぎ目を形成するために、長手方向に延在する大型の構成要素を形成し開いた面を有する中空空間を確定するジャケット胴体のシェル形状長手方向セグメントを連結する取り付け装置。
【解決手段】中空空間の内でジャケット胴体の長手方向に案内されて移動できる内側工具31、外で長手方向に案内されて移動できる外側工具32を有する工具対を少なくとも一つ有し、工具は胴体の長手方向を横断する方向に対となってともに作用し、ジャケット胴体の中空空間内で長手方向に延在し内側工具を案内して移動させる内側ガイドキャリアによって形成され、ジャケット胴体の外側で長手方向に延在し外側工具を案内して移動させる外側ガイドキャリアを有するキャリア対を具備する。
(もっと読む)
限定された空間を有する構造における同期的なロボット動作
【課題】主翼ボックスの組立てのように、ある作業が構造の反対側で同時に行われる作業の自動システムを提供すること。
【解決手段】構造は限定された空間の内部及び限定された空間の外部から識別可能な位置を有する。第1のロボットシステムは第1のエンドエフェクタが所定の位置上に位置付けられるように限定された空間内で第1のエンドエフェクタを動かす。その位置に対応する第1のベクトルが発生される。第2のロボットシステムは第2のエンドエフェクタが前記位置上に位置付けられるように限定された空間の外部で第2のエンドエフェクタを動かす。その位置に対応する第2のベクトルが発生される。第1および第2のベクトルは第1及び第2のエンドエフェクタが対向して動作するように第1及び第2のエフェクタを新しい位置に動かすために使用される。第1及び第2のエンドエフェクタは新しい位置で同期的に動作を行う。
(もっと読む)
翼部の位置決め取り付けシステム
本発明の実施形態によれば、航空機の翼部(101)を航空機の胴体部(102)に取り付けするための位置決めシステムが提供される。上記位置決めシステムは、ユーザーの関与なしにて、上記胴体部に対する上記翼部の最終調整、および最終位置決めを行うことができる、プログラム化可能な取り付けユニット(103)を備えている。これにより、取り付けプロセスの迅速化が可能となる。 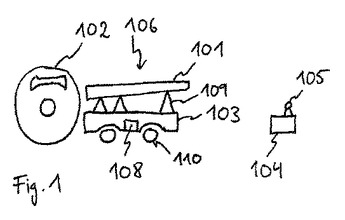 (もっと読む)
(もっと読む)
インテリジェントファスナ設置システム
【課題】固定装置および/または設置、位置付け、追跡および/または監視方法のうちの1つ以上に関する1以上の問題を減少および/または除去する。
【解決手段】ファスナ装置50の1実施形態はファスナ18および/またはカラー21に関する情報を備えたコード30を有するファスナとカラーの少なくとも1つを含むことができる。そのコードはコンピュータ56の1以上のデータベース57へ通報されることができる。ファスナおよび/またはカラーはコードおよび/またはデータベース情報にしたがって締められ、位置付けられ、維持されおよび/または検査されることができる。
(もっと読む)
センタリングマンドレル、装置、および構造を設置するための方法
【課題】構造を位置合わせするための方法および装置を提供する。
【解決手段】1つの有利な実施形態において、装置は先細り部材および複数のセグメントを含む。先細り部材は第1端および第2端を有し、直径は第1端から第2端に増大し、直径は第1の中心を有する。複数のセグメントの各々は内側面および外側面を有し、複数のセグメントは先細り部材を収容することができる先細り通路を規定し、外側面の外径は、第1の中心に対応する第2の中心を有し、複数のセグメントが第2端に移動すると、第2の中心が同じ場所周辺にとどまっている状態で外径が増大する。
(もっと読む)
部品状態管理方法及びシステム
【課題】部品状態管理方法及びシステムに関し、例えばネジが緩んだ場合にも確実に検出でき、しかも、膨大な量の部品(ネジ等)についても容易に管理できるようにする。
【解決手段】各所に延在して装備された複数の取付用のネジ1,2の各近傍にそれぞれ装備され、ネジ1,2の状態に応じて閉成・開成が切り換わるスイッチ15と、スイッチ15と接続されスイッチ15の閉成・開成状態に応じて応答するRFタグ12とをそなえてなる部品管理具10と、部品管理具10に接近させてRFタグ12からの応答情報を読み取る読取装置20と、読取装置20を装備し、延在するネジ1,2に沿って付設されたレール201,202上を走行する走行体210とをそなえ、走行体210を走行させながら、読取装置20によって各RFタグ12からの応答情報を読み取る。
(もっと読む)
締結自動化システムおよび組み付け方法
基板への締結部品の組み付けのための締結自動化システムは、基板に組み付けられる適切な締結部品の所定位置の像を基板上におよび適切な締結部品と基板に関連するデータを投影する投影システムと、適切な締結部品と適切な締結部品が組み付けられる基板上の所定位置に関連するデータを保存する投影システムに動作可能に関連付けられたコンピュータを備える。締結部品を所定位置において基板に組み付ける自動化された方法は、基板への適切な締結部品の組み付けのために所定位置を特定するための投影システムの使用と、所定位置における適切な締結部品の組み付けに関するデータの収集とコンピュータへのこのデータの保存と、このデータに基づいて所定位置において基板に適切な締結部品を組み付けることを含む。 (もっと読む)
自走型作業機械の組立て用治具装置
【課題】 自走型作業機械におけるフレーム体を組立てる際の治具の取り替えや管理を簡単に行うことができるとともに、治具の保管スペースの削減に有効となる管理をも容易に行える組立て用治具装置を提供する。
【解決手段】 バックホウなどの自走型作業機械の組立て用治具装置であって、仮組み溶接された旋回フレーム4をワークWとして支持する作業台32に、一対の可動枠45を水平方向に並列配備するとともに、各可動枠45を可動枠並列方向に駆動手段47によって移動調節可能に構成し、各可動枠45のそれぞれに、ワークWを係止するクランプ金具34を、可動枠45の移動方向と直交する水平方向に移動可能に配備するとともに、各クランプ金具34を可動枠45の移動方向と直交する水平方向に駆動手段50によって移動調節可能に構成してある。
(もっと読む)
自走型作業機械の組立て用治具装置
【課題】 自走型作業機械におけるフレーム体を組立てる際の治具の取り替えや管理を簡単に行うことができるとともに、治具の保管スペースの削減に有効となる管理をも容易に行える組立て用治具装置を提供する。
【解決手段】 バックホウなどの自走型作業機械の組立て用治具装置であって、ワークWとしてのトラックフレーム3あるいは旋回フレーム4を保持する作業台60を、機械加工機61の加工処理位置と、これから外れたワーク脱着位置との間に亘って進退移動可能に構成し、この作業台60には、ワークWを固定する複数のクランプ部材78を、直交する2方向に駆動手段83によって移動調節可能に装備してある。
(もっと読む)
少なくとも1つの長手方向連結継ぎ目を配置することによってカバー胴体のシェル形状長手方向セグメントを連結する取り付け装置
長手方向連結継ぎ目を形成するために、長手方向に延在する大型の構成要素を形成し開いた面を有する中空空間を確定するジャケット胴体のシェル形状長手方向セグメントを連結する取り付け装置は、中空空間の内でジャケット胴体の長手方向に案内されて移動できる内側工具、外で長手方向に案内されて移動できる外側工具を有する工具対を少なくとも一つ有し、工具は胴体の長手方向を横断する方向に対となってともに作用し、ジャケット胴体の中空空間内で長手方向に延在し内側工具を案内して移動させる内側ガイドキャリアによって形成され、ジャケット胴体の外側で長手方向に延在し外側工具を案内して移動させる外側ガイドキャリアを有するキャリア対を具備する。各ガイドキャリアは、胴体長手方向を横断して延びる少なくとも2つの独立した空間方向に移動可能に保持され固定でき、工具は対となってジャケット胴体の長手方向円周部で異なる位置を選択的にとる。 (もっと読む)
1 - 16 / 16
[ Back to top ]