
Fターム[3C030CC01]の内容
自動組立 (6,729) | 輸送機械の組立・分解 (611) | 自動車 (578)
Fターム[3C030CC01]の下位に属するFターム
艤装物品の車体への組付 (164)
車体搬送設備 (28)
艤装物品の組立 (292)
Fターム[3C030CC01]に分類される特許
1 - 20 / 94
車体組立システム
棒状締結材の挿入方法
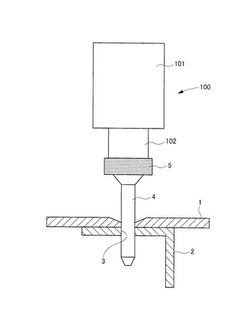
【課題】超音波振動を用いて、ワークの孔にファスナを進入させていき、騒音及び振動の低減を図る。
【解決手段】超音波振動装置100は、超音波振動を発生する超音波振動部101と、ホーン102とで構成されており、発生した振動をアンビル5を介してファスナ4に伝達する。これによりファスナ4が、スキン1とストリンガ2に形成した孔3を押し広げつつ進入していき、スキン1とストリンガ2とを接続することができる。超音波振動を利用しているため、騒音や振動、及び加工力を低減することができる。
(もっと読む)
ワーク位置決め装置およびそれを用いた生産システム

【課題】本発明は、1つの機種で構成され、加工エリアのフットプリントを小さくできるワーク位置決め装置を用いた生産システムを提供する。
【解決手段】水平方向に可動する第1の移動装置と、垂直方向に可動する第2の移動装置と、前記第2の移動装置の上端または下端のいずれか一方に備えられた回転装置を備え、前記第1の移動装置の移動方向に水平面内で直交する幅に、前記第2の移動装置および前記回転装置が収められたものである。
(もっと読む)
溶接接合による組立方法
【課題】コストを抑えた簡便な組み立て手法であって、かつ、設計上の条件を満足し得る溶接接合による組立方法を提案する。
【解決手段】溶接接合による組立方法は、仮組立工程と、溶接工程と、加熱工程とを含んでいる。仮組立工程は、溶接接合する部材21、22、23を組立治具30にセットし、加熱処理によって接着力が低下して剥離可能な熱剥離型接着剤36によって仮止めして仮組立体31を形成する工程である。溶接工程は、仮組立体を溶接治具40にセットし、部材同士を溶接接合して接合体41を形成する工程である。加熱工程は、接合体を加熱処理して熱剥離型接着剤を剥離して組立体51を得る工程である。
(もっと読む)
溶接組付方法
【課題】溶接を施すワークの種類が多岐にわたる製造ラインでの治具の切替を容易にし、低コストで短期間に設定変更ができる生産設備を提供する。
【解決手段】溶接組付ライン100には、台車106の経路107が設定されている。台車106には、治具110が着脱自在に載置される。識別部150は、治具110にセットされたワークの種類を特定する。台車106が進行した後、リフタ112は、ワークがセットされている治具110を持ち上げて保持する。溶接ロボット111は、リフタ112に保持された治具110上のワークに対して、識別部150によって特定されたワークの種類に応じた溶接を施す。溶接後、解放装置113は、ワークを治具110から解放する。マテリアルハンドリングロボット114は、この解放されたワークを取り出す。
(もっと読む)
搬送装置
【課題】簡単な構造でコンパクトな汎用性の高い搬送装置を提供する。
【解決手段】搬送装置1は、支持手段21に支持されたトレー11の下方位置で、無端の駆動チェーン33をトレー11の循環経路に沿って走行させて、チェーン案内手段32Bによって直進動作の開始位置から終了位置まで案内し、直進動作の終了位置で駆動チェーン33の走行方向を列方向から横方向に変更し、横進動作の開始位置から終了位置まで案内し、横進動作の終了位置で駆動チェーンの走行方向を横方向から列方向に変更する。そして、トレーブロックへの押し当てが直進動作の開始位置から終了位置までの間と横進動作の開始位置から終了位置までの間で交互に行われるように複数のローラアタッチ34を駆動チェーン33に所定のピッチで設ける。
(もっと読む)
ロボット工具
【課題】 特に自動車の工業生産において、プラグの取り付けをさらに簡潔にする、または自動化するロボット工具を提供する。
【解決手段】 本発明は、ロボット取り付け領域(2)を有する、工業生産においてプラグ(18)を取り付けるためのロボット工具に関し、ロボット取り付け領域でロボット工具(1)を産業用ロボットに取り付けることができる。工業生産において、特に、自動車の工業生産時に、プラグの取り付けをさらに簡潔にする、または自動化するために、ロボット工具(1)は、前後に移動でき、プラグ(18)を取り上げ、進めることができる押し棒(42)を有する。
(もっと読む)
作業管理システム
【課題】システム全体を小型化および簡略化することができる作業管理システムを提供することを課題とする。
【解決手段】作業管理システム1であって、ボルトB1〜B4を締め付けるとともに、ボルトB1〜B4を加工したことを示す加工情報を出力する工具10と、各ボルトB1〜B4に配置された工具10を検出し、工具10の位置情報を出力する検出センサ20と、検出センサ20から入力された位置情報と、位置情報が入力されているときに工具10から入力された加工情報とを対応させて表示する表示部32を有する管理装置30と、を備えている。
(もっと読む)
部品位置決め構造
【課題】極めて簡単な構造であって、部品の固定に際して作業者の習熟度に関係なく、高い精度で容易に部品を位置決め可能な部品位置決め構造を提供することを目的とする。
【解決手段】本発明にかかる部品位置決め構造100の代表的な構成は、部品120に設けられ平面110aと対向する所定の端部120aと、部品120に設けられ所定の端部120aに向かって下降するように傾斜した長孔122と、長孔122に挿入されて部品120を回転および摺動可能に支持する支持部材112であって、長孔122の一端から他端までの摺動の間に所定の端部120aが平面110aに接触する位置にある支持部材112と、を備え、重力の作用により部品120が平面110aに接近し、所定の端部120aが平面110aに接触することにより、部品120は平面110aに位置決めされることを特徴とする。
(もっと読む)
コンポーネント組立システムおよびコンポーネント組立方法
【課題】高精度でフロントフロアコンポーネントを組み立てできるフロントフロアコンポーネントの組立システムを提供すること。
【解決手段】コンポーネント組立システム1は、セットステーション2と、組立ステーション3と、セットステーション2と組立ステーション3との間で移動する搬送台車30と、セットステーション2の周囲に設けられた3つの供給エリア4〜6と、セットステーション2の周囲に設けられて部品11〜13、21〜23をセットステーション2または組立ステーション3に搬送する搬送ロボット40A、40Bと、組立ステーション3の周囲に設けられて組立ステーション3に位置する部品11〜13、21〜23を加工する溶接ロボット50と、組立ステーション3の周囲に設けられて組立ステーション3に位置する組み立てたフロントフロアコンポーネント10、20を払い出す払出しロボット60と、を備える。
(もっと読む)
ドア搬送設備
【課題】塗装済み車体から取り外したドアを艤装ラインに送り込み、仕上げられたドアを再び元の車体の左右両側に組み付ける際に活用できるドア搬送設備を提供する。
【解決手段】昇降装置7A,7Bは、補助コンベヤ8A,8Bとの間でドアハンガー9R,9Lを移載する上側の第一ドアハンガー移載位置L2と床側のドア積み/下ろし位置L1との間で前記ドアハンガーを昇降させ、補助コンベヤ8A,8Bは、第一ドアハンガー移載位置L2と第二ドアハンガー移載位置L3との間で前記ドアハンガーを搬送し、第一ドアハンガー移載位置L2には、昇降装置7A,7Bと補助コンベヤ8A,8Bとの間で前記ドアハンガーを移載する第一移載手段が併設され、第二ドアハンガー移載位置L3には、補助コンベヤ8A,8Bとドア搬送用走行体40のドアハンガー支持部48a,48bとの間で前記ドアハンガーを移載するドア搬送用走行体昇降装置76が併設される成。
(もっと読む)
ドア搬送装置
【課題】各種部品を取り付ける艤装作業エリアにおけるドアの搬送手段として活用できるドア搬送装置を提供する。
【解決手段】ドアハンガー9R,9Lには、その上部にのみ被支持部15a,15bが設けられ、ドア搬送用走行体40には、その左右両側に、ドアハンガー9R,9Lの被支持部15a,15bのみを支持するドアハンガー支持部48a,48bが設けられ、この左右両側のドアハンガー支持部48a,48bにそれぞれドアハンガー9R,9Lが支持されたとき、上側が前記ドア搬送用走行体40で閉じられると共に左右両側がドア搬送用走行体40から垂下するドアハンガー9R,9Lで閉じられて、両ドアハンガー9R,9Lの間に、下側とドア搬送用走行体40の走行方向前後両側が開放された空間Sが形成され、各ドアハンガー9R,9Lには、前記空間Sに隣接する側とは反対の外側でドアDR,DLを支持するドア支持具11,12が設けられた構成。
(もっと読む)
設備検討支援システム
【課題】組付の可否、組付性能等の生産設備の検討を簡単かつ迅速に行うことができる設備検討支援システムを提供すること。
【解決手段】検索システム部23は、CADシステム部22によって、検討する組付工程の生産設備の図形及びベース部品の図形をディスプレイ4に表示すると共に、検索用データベースにおけるサブ組付データに基づいて、検討する組付工程においてベース部品に対して組み付けるサブ組付体を構成する複数の組付部品の図形を当該サブ組付体として組み合わせた状態でディスプレイ4に表示し、かつ、検索用データベースにおけるメイン組付データに基づいて、検討する組付工程においてベース部品に対して既に組み付けられている組付部品の図形を当該ベース部品と一体に組み合わせた状態でディスプレイ4に表示する。
(もっと読む)
角形ロッドのクランプ装置
【課題】 断面がほぼ六角形状の角形部を確実にクランプすることが可能であり且つ耐久性に優れ長期の寿命を有するクランプ装置を提供する。
【解決手段】 本発明によるクランプ装置は、夫々半径方向に切り欠いた挿入口を具備している一対の第1及び第2ギヤとそれらの間に揺動自在に配設された一対のアームとを有している。断面がほぼ六角形の角形部の一対の対向する平面部を一対のアームの夫々の平坦面と当接して角形部をクランプ状態とさせる。該一対のアームは夫々湾曲面を具備しており、これらの湾曲面は内側の周壁に形成されたカム面と摺接しており、クランプ状態において少なくとも部分的に両者間において面接触している。該一対の第1及び第2ギヤは夫々別個の第1及び第2モータによって可逆的に回転制御される。
(もっと読む)
部品供給管支持装置
【課題】配管姿勢を自由に設定するとともに、部品検知用のセンサーの位置決め等を行うことのできる部品供給管支持装置を提供する。
【解決手段】部品供給管22が供給ヘッド16に接続され、供給ヘッド16内に保持された部品5を供給ロッド1で供給するとともに、供給ヘッド16に結合した変形可能な支持部材17を部品供給管22に沿わせて配置し、この支持部材17の端部に保持部24を結合して部品供給管22の端部を保持する形式のものであり、部品供給管22内の待機部品個数を検知するセンサー31が部品供給管22に取付けられ、このセンサー31の取付位置は支持部材17に沿って位置調整ができる位置決め構造部33によって設定するように構成されている。
(もっと読む)
ワーク位置決め装置
【課題】簡易で且つ安価な構成のもとで多車種のボディの位置決めに対応可能としたワーク位置決め装置を提供する。
【解決手段】ベースプレート4上の領域Q1に搭載される左右一対のロケータ治具5のロケートピン7同士のなすスパンを一時的に領域Q2まで拡張可能なようにエクステンションブロック20を用意しておく。ベースプレート4とエクステンションブロック20の位置決めはパイロットピン31によるものとし、定盤への位置決めはエクステンションブロック20側の位置決め穴27に位置決めピン18を挿入し、その位置決めピン18の下端の二面幅部18bを定盤側の溝に係合させる。
(もっと読む)
車両組立ラインにおけるドア搬送装置およびドア搬送方法
【課題】コンベヤの総設置距離を小さくしつつ、左右のドアの艤装組立作業を作業者が対面するかたちで行う際に、一方の作業者側でのハンガーの揺れ等が他方の作業者側での作業に影響しないドア搬送装置を提供する。
【解決手段】一次コンベヤ3と一対の二次コンベヤ4と備え、一次コンベヤ3の一次ハンガー5に各二次コンベヤ4の二次ハンガー16がそれぞれに吊り下げ支持可能となっている。特定の区間ではドアDを搭載した二次ハンガー16を二次コンベヤ4のガイドレール17から外して一次コンベヤ3によって搬送する。別の区間では各二次ハンガー16を一次ハンガー5から切り離し、それぞれの二次コンベヤ4で独立して搬送する。
(もっと読む)
作業システム
【課題】ロボットに不具合が生じても、人手作業エリアの作業者の手が空いてしまうのを防止できる作業システムを提供すること。
【解決手段】ワーク組立てシステムは、人手作業エリアと、人手作業エリアの下流側に設けられたロボット作業エリアと、人手作業エリアとロボット作業エリアとの境界部分に設けられた第1緩衝スペースと、を備える。人手作業エリアでは、ボディを連続送りとし、ロボット作業エリアでは、ボディをタクト送りとする。緩衝スペースの長さl1は、以下の式(1)で決定される。
ここで、lTは、タクト送りの1タクト分の長さであり、tは、ロボットに不具合が発生した場合にワークのタクト送りによる搬送が停止する時間であり、vは、ワークの搬送速度である。
(もっと読む)
組み立てシステム
【課題】1つのラインで異なる種類の自動車部品を組み立てつつ、設備スペースを削減できる組み立てシステムを提供すること。
【解決手段】組立てシステム1は、本体および部品でそれぞれ構成される複数種類の自動車部品を組み立てる。この組み立てシステム1は、前記複数種類の自動車部品のそれぞれの本体および部品が載置されて走行する複数の走行台車21〜24と、複数種類の自動車部品のそれぞれの部品が載置された複数の部品用パレット30と、部品用パレット30を搬送するベルトコンベア40と、作業者が配置されるメインライン50と、このメインライン50からオフセットされて、ロボットRB1〜RB5が配置されるバイパスライン80と、これらを制御する制御装置60と、を備える。制御装置60は、メインライン50およびバイパスライン80のうち少なくとも1つにより走行台車21〜24の搬送経路を設定する。
(もっと読む)
車体構造体の組立方法
【課題】車体構造体の組立方法を提供する。
【解決手段】車体構造体12を組み立てる為の装置10は、第一側部構造体20、第二側部構造体22、後部構造体24、上部構造体26、および、底部構造体28に係合するように構成された第一の側部エンド・エフェクター30、第二の側部エンド・エフェクター32、後部エンド・エフェクター34、及び、上部エンド・エフェクター36を含む。多軸式ロボット・マニピュレータMが、対応するエンド・エフェクターの位置を合わせるために使用され、複数のマニピュレータMは、必要とされる位置決め動作に応じ、同一若しくは異なる構成を持ち、複雑化を防ぐために共通化される。
(もっと読む)
1 - 20 / 94
[ Back to top ]