
Fターム[3C038CA08]の内容
スパナ、レンチ、ドライバーの細部、付属具 (2,087) | 締付力制御手段(検知手段) (373) | 検知対象 (266) | 締付対象部材と締結部材の位置関係を検知 (10)
Fターム[3C038CA08]に分類される特許
1 - 10 / 10
トルクレンチ
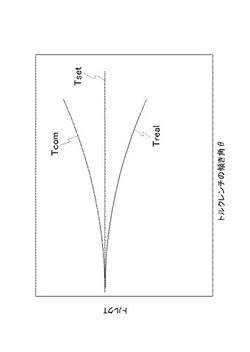
【課題】トルクレンチが傾いた状態でねじ部に対する締め付け作業が行われても、ねじ部に作用する実際の締め付け力を正確に測定できるようにする。
【解決手段】トルクレンチ20は軸部22の先端に締め付けヘッド21を設けたものであり、締め付けヘッド21にはナット12と係合する係合部24が設けられており、この係合部24には、トルクレンチ20のナット12の軸線Aに対する傾きを検出するために、円弧状部24bに軸線A方向に3個の距離センサ25を配列して設けて、それらの距離差から傾き角検出部27でトルクレンチ20の傾きを検出して、ナット12に対する実際のトルクを検出し、予め設定されている規定トルク値をトルク補正回路30により補正して、補正規定トルク値を演算により求める。
(もっと読む)
自動ねじ締め機

【課題】ねじのねじ込み量の良否判定を正確に行うことができる自動ねじ締め機を提供する。
【解決手段】ドライバツール6とともに移動するビット63に押されたねじSがワークに当接することにより、ビット63に所定の移動抵抗が作用したことを検知し、この位置からねじ締め完了位置までのビット63の移動量を測定する。このビット63の移動量を測定する間、ねじ込み時の移動量とは異なるビット63の移動量を検出し、これを前記測定した移動量から除外する補正を行い、この補正した移動量を予め設定された基準移動量と比較してねじ込み量の良否判定を行う。
(もっと読む)
ねじ部品締結装置
【課題】高速、かつ高精度にねじ部品を締め付けることが可能なねじ部品締結装置を提供する。
【解決手段】ねじ部品締結装置1は、ドライバビットが連結される出力軸11と、モータ3に連結して高速低トルク駆動を出力軸へ伝達する高速低トルク駆動伝達系と、減速機12を介して低速高トルク駆動を出力軸へ伝達する低速高トルク駆動伝達系と、仮締め工程では高速低トルク駆動伝達系により回転駆動を出力軸11へ伝達する一方、本締め工程では低速高トルク駆動伝達系により回転駆動を出力軸へ伝達するようこれら伝達系を切り替えるクラッチ手段8,14と、仮締め工程においてねじ部品が着座する直前に出力軸11の回転速度を所定の回転速度に減速するようモータ3を駆動制御する制御ユニット18とを備える。
(もっと読む)
回転式工具
【課題】動作を停止させることになる対象部材までの距離の設定変更を容易に行う。
【解決手段】対象物体までの距離を測定する距離センサー3と、該距離センサーからの距離情報と所定値との比較結果に基づいて作動中のモータ2を停止させる制御手段8と、上記所定値を記憶する記憶手段80と、この記憶手段が記憶する所定値を距離センサーの現在出力値で書き換える書き換え手段とを備え、上記制御手段は、動力である正逆転自在のモータの逆転時には距離情報と所定値との比較によるモータ停止動作をオフとする。
(もっと読む)
ジョイントの締め付け方法及び装置
本発明は、締め具締め付け用電気組立装置(200)に関し、前記装置(200)は、ハウジング(210)、出力軸(214)に駆動接続される回転モータ(215)、及び前記ハウジング(210)の外まで伸び、かつ、締め付けの間に前記締め具を取り外し可能に連結する連結手段を支持するように構成された前方部分(217)を有する前記出力軸(214)を備え、第一軸線(A1)に沿って前記締め付けが実行されるように構成されている。前記装置(200)は、締め具の締め付け中に前記第一軸線(A1)に対するハウジング(210)の角変位(α,β)を測定する手段と、ハウジング(210)の前記測定された角変位(α,β)を使用して締め付け中に前記モータの回転を制御する手段(220)を備えている。 (もっと読む)
電動ドライバ
【課題】ネジ囓りやネジ浮きのない適正なネジ締めを行える装置を提供する。
【解決手段】モータ52が逆回転している時、電流上昇検出装置3は電流値の上昇を検出し、電流上昇回数カウンタ5はその上昇回数をカウントする。電流値の上昇が連続的に所定回数になったら、電流上昇部30にあると判断し、電流下降検出装置4は電流下降部35を監視し、該電流値の下降が所定電流値以上になったら、その旨の検出結果を制御装置1に送信し、制御装置1はモータ52の回転を止める。この停止位置からモータ52を正転させてねじ込みを行わせる。
(もっと読む)
ねじ締め装置
【課題】動力の伝達時の騒音、振動を低減させ、操作性に優れたクラッチ機構のあるねじ締め装置を提供する。
【解決手段】モータと、モータを収容するハウジング2と、ハウジング2に対して回転可能で、軸方向に移動可能なスピンドル16と、モータからの動力が伝達されるギヤ部5と、ギヤ部5からの動力が伝達される第1クラッチ部材7と、第1クラッチ部材7に設けられた第1の爪10と、スピンドル16に接続される第2クラッチ部材22と、第2クラッチ部材22に設けられ、第1の爪10と噛合う第2の爪23と、を有するねじ締め装置において、該ギヤ部5と第1クラッチ部材7の間、またはスピンドル16と第2クラッチ部材22の間に弾性体6を設け、該ギヤ5部と第1クラッチ部材7の間、またはスピンドル16と第2クラッチ部材22の間を相対的に回転可能とした。
(もっと読む)
回転式工具
【課題】 相手部材が硬質、軟質いずれであっても簡単な構成で着座を検出でき、ねじの締めすぎや早止めを防止できる回転式工具を提供する。
【解決手段】 回転式工具1に測距手段2を設ける。測距手段2により相手部材3の座面4と回転式工具1の先端が所定の距離になったことを検知して着座と判断し回転式工具1の回転を停止するための制御部6を設ける。
(もっと読む)
自動工具
【課題】自動工具における作業工具を簡便な操作によって被作業部に対して適切な向きに設定する。
【解決手段】電動インパクトレンチ10の本体部には、回転工具36が取り付けられる工具軸と、該工具軸を回転させるモータと、表面板における3箇所までの距離を検出する非接触距離検出センサ60a、60b及び60cとを有する。回転工具36の六角ソケット部56に装着されたナット18は表面板から垂直に突出するボルトに螺合する。非接触距離検出センサ60a〜60cにより得られた表面板から本体部までの各距離L1、L2、L3に基づいて工具軸と表面板とのなす角度を求め、該角度が適正な垂直範囲であるときにモータに対するインターロックを解除するとともに姿勢インジケータ86を点灯させる。
(もっと読む)
回転式工具
【課題】動作を停止させることになる対象部材までの距離の設定変更を容易とする。
【解決手段】対象物体までの距離を測定する距離センサー3と、該距離センサー3からの距離情報と所定値との比較結果に基づいて作動中のモータ2を停止させる制御手段8とを備える。また、上記所定値を記憶する記憶手段80と、この記憶手段が記憶する所定値を距離センサー3の現在出力値で書き換える書き換え手段とを備える。モータを停止させる対象部材までの距離を実際に作業を行ってみた時点での距離とすることができる。
(もっと読む)
1 - 10 / 10
[ Back to top ]