
Fターム[3C042RF00]の内容
多工程加工の機械及びシステム (754) | ユニット式の工作機械 (15)
Fターム[3C042RF00]の下位に属するFターム
ユニットの組合せからなる工作機械 (5)
ユニット (4)
ユニットの交換 (1)
ユニットの固定、位置調整 (3)
Fターム[3C042RF00]に分類される特許
1 - 2 / 2
ワークの移送方法および工作機械並びに加工ライン
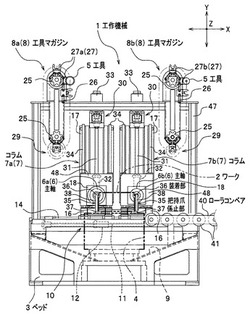
【課題】工作機械の構成を複雑化させることなく、ワークを容易に移送する。
【解決手段】2つのコラム7a,7bの主軸6a,6bにワーク2を把持するための把持爪(移送用ホルダー)35,35をそれぞれ装着した後に、コラム7a,7bをワーク2の移送方向両側に移動させて2つの把持爪35,35でワーク2を移送方向両側から挟むように把持し、2つのコラム7a,7bをワーク2とともにその移送方向へと移動させ、把持爪35,35によるワーク2の把持を解除した後に、2つのコラム7a,7bのうち、ワーク2の移送方向に位置するコラム7bを移送方向に移動させながら把持爪35を傾動させてワーク2をその移送方向に押し込むようにした。
(もっと読む)
ワークピース用モジュラー移送システム

【課題】
【解決手段】本発明は、ワークピース用モジュラー移送システム1に関する。本発明の本質は、ワークピースキャリアー22乃至27が、製造モジュール6乃至9において、ワークピースキャリアーを移送するのと同じCNC(x−y)軸システム及びサーボ駆動装置13,14,15によって位置決めされることである。このため、移送ための独立したコンベアーベルトが必要ない。
(もっと読む)
1 - 2 / 2
[ Back to top ]