
Fターム[3C042RG16]の内容
多工程加工の機械及びシステム (754) | 工具の取扱い (18) | 機械との授受 (4)
Fターム[3C042RG16]に分類される特許
1 - 4 / 4
加工システム及び加工方法
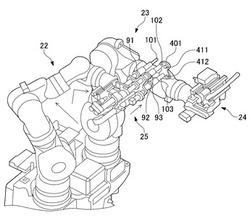
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
自動生産装置

【課題】小型かつ低コストで、多品種に容易に対応可能な汎用性の高い自動生産装置を提供する。
【解決手段】ワークWに対して複数の作業を行う自動生産装置1は、架台2上に設置されてワークWの搬送及び複数の作業を行うロボット3と、ロボット3に交換可能に取付けられ、ワークWの搬送及び複数の作業の少なくとも1つに対応する形状に形成された複数の作業ハンド4と、基台11と、基台11上に設置されて複数の作業のうち少なくとも1つに使用される作業機構とを有し、架台2上かつロボット3の作業範囲内に交換可能に配置された複数の作業ユニット5A〜5Fと、架台2上に設けられ、作業ユニット5A〜5Fの配置位置を規定する位置決め手段6と、ロボット3及び複数の作業ユニット5A〜5Fと接続され、ワークWの搬送及び複数の作業を制御する制御部とを備えることを特徴とする。
(もっと読む)
工作機械システム
【課題】コンパクトな構成で工作機械間のワーク搬送効率が高い工作機械システムを提供する。
【解決手段】工作機械システム10は、隣接して平行に設けられた第1工作機械11a及び第2工作機械11bと、コントローラ12と、ワーク移動装置14とを備える。第1工作機械11a及び第2工作機械11bは、鉛直平面内において360°回転する回転アーム32と、該回転アーム32に設けられた加工主軸36とを有する。ワーク移動装置14は、水平面で回転可能なターンテーブル150と、ターンテーブル150上で回転してワークWの加工面を加工主軸36に対向する向きに設定する3つの副回転機構152と、副回転機構152が120°間隔の第1保持位置154a、第2保持位置154b及び第3保持位置154cに配置されるようにターンテーブル150を間欠回転させる主回転機構156とを有する。
(もっと読む)
多面加工機およびワーク位置決め装置
【課題】ワークの加工をいくつかの側面から、被加工面間の相互の寸法精度を高精度で行えるようにするための位置決め装置を備えた多面加工機を提供する。
【解決手段】本発明は、ワーク(40,40’)を加工するための少なくとも2つの加工装置(3,4,55)と、ワーク(40,40’)を締付けるための締付装置(19,19A,19B)を有する少なくとも1つの位置決め装置(7,7B〜7F)とを備えた、ワーク(40,40’)のいくつかの表面または側面を加工するための多面加工機(1,45,50)に関する。本発明によると、位置決め装置(7,7B〜7F)は、締付けたワーク(40,40’)を少なくとも2つの加工ユニット(3,4,55)の加工位置間で移動できる移動装置(15,15B,15C;16)上に配置され、さらに締付装置(19,19A,19B)を縦軸(A)および/または横軸(B)を中心に回転または枢動することができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]