
Fターム[3C048DD00]の内容
工作機械の機体 (3,121) | 可動機構 (907)
Fターム[3C048DD00]の下位に属するFターム
1摺動系 (180)
2摺動系 (144)
3摺動系 (122)
1回転系 (212)
2回転系 (70)
3回転系 (4)
1摺動系と1回転系 (17)
リニアモータで駆動されるもの (87)
圧電素子で駆動されるもの (16)
カム、くさびを介して駆動されるもの (18)
Fターム[3C048DD00]に分類される特許
1 - 20 / 37
可動体支持装置
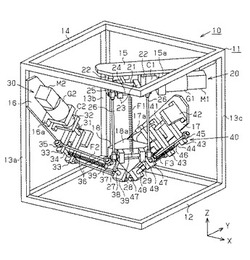
【課題】X軸方向、Y軸方向、及びZ軸方向のいずれの方向においてもリンクの剛性を得ることができる可動体支持装置を提供すること。
【解決手段】可動体支持装置10は、可動体18の移動範囲の中で、Z軸と一致する方向に可動体を支持可能な第1のリンク機構部20、X軸と一致する方向に支持可能な第2のリンク機構部30、及びY軸と一致する方向に支持可能な第3のリンク機構部40を有する。第1〜第3のリンク機構部20,30,40は2本の第1〜第3のリンク26,36,46を有する。第1〜第3のリンク26,36,46それぞれは可動体18の移動範囲の中で各軸に一致可能に延びるとともに、可動体18の移動範囲の中で隣り合うリンク機構部20,30,40のリンク26,36,46のなす角度が90度を取り得るように構成されている。
(もっと読む)
位置決めテーブル

【課題】組み立てが容易で、荷重が付与された際にもテーブル板を正確な位置に維持することができる位置決めテーブルを提供すること。
【解決手段】基台の上方に下記条件を満足する三以上の支持ユニットを介してテーブル板を支持する位置決めテーブル:(1)各々の支持ユニットは、基台表面にスライド可能に設置された昇降装置、および昇降装置とテーブル板とを接続する接続具からなる;(2)昇降装置は、基台表面に沿って延びるレール24、レールに支持された第一のスライド部材21及び第二のスライド部材22、第二のスライド部材の上方に傾斜配置された第一のリニアガイド31を介して支持され、第一のスライド部材の側面に第二のリニアガイド32を介して昇降可能に接続された昇降部材23、および各スライド部材を上記レール上でスライドさせて保持する駆動手段25からなる;(3)接続具は、球面軸受34と球面軸受を保持する第三のリニアガイド33とからなる。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
加工方法及び加工装置
【課題】断面積が大きな長尺のワークであっても、材料の無駄を低減して加工できると共に、複雑形状の多品種の部品を加工することが可能な加工装置を提供する。
【解決手段】加工装置1は、長尺のワークWを把持及び解放すると共に、ワークを把持した状態ではワークを変位させることなく一の姿勢に保持する把持装置20と、回転工具の主軸を備え、把持装置からワーク前端部Eを突出させた状態で把持装置に把持されているワークを、主軸に取り付けられた回転工具で加工すると共に、加工済みのワーク前端部をワークの未加工部分から切り離す多軸ロボット40と、把持装置から解放されている状態のワークを、長軸方向に前進させるワーク送り装置30とを具備する。
(もっと読む)
揺動装置
【課題】モータの質量に関わらず、応答性の高い揺動装置を提供する。
【解決手段】揺動装置10は、ベース12と、揺動テーブル14と、複数のリンク機構20と、当該リンク機構20を駆動するモータ26と、リンク機構20と揺動テーブル14との間に介在する連結部材と、を備える。リンク機構20は、モータの駆動に応じて、その上端位置がリンク機構面内で変化するものの、リンク機構面の位置およびリンク機構面の角度は不変である。連結部材は、スライド機構22と、X,Y,Z軸回りの回動を許容する回転ジョイントと、を有しており、揺動テーブル14がリンク機構20に対して回動およびスライドすることを許容する。そして、かかる構成とすることで、モータ26をベース12に固定設置(位置固定)することが可能となる。そして、結果として、リンク機構20、ひいては、揺動装置10の応答性を向上することができる。
(もっと読む)
パラレルリンクステージおよび光学素子測定装置
【課題】パラレルリンクステージおよび光学素子測定装置において、パラレルリンク機構の並列方向に沿う可動部材の回転範囲を向上することができるとともに可動部材およびパラレルリンク機構によって囲まれる領域の中心部に開放空間を形成することができるようにする。
【解決手段】パラレルリンクステージ1は、回転軸線C回りに回転可能に支持された回転台部2と、回転台部2を回転軸線C回りに回転させるモータ10と、回転台部2と間隔をあけて配置される可動部材3と、回転台部2および可動部材3の間で回転軸線Cを取り囲むように周方向に間隔をあけて少なくとも3箇所で回転台部2および可動部材3を連結し、回転台部2に対する可動部材3の各連結距離を変化させるパラレルリンク機構4と、パラレルリンク機構4およびモータ10の動作制御を行うことにより、可動部材3の位置制御および姿勢制御を行う制御ユニット50と、を備える。
(もっと読む)
パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージ
【課題】パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージにおいて、ベースに対するエンドエフェクタの基準位置出しとアクチュエータの原点補正とを、高精度かつ容易に行うことができるようにする。
【解決手段】パラレルリンクステージの調整方法であって、各パラレルリンク機構の動作を自由化するリンク自由化工程と、ベース2およびエンドエフェクタ3を相対移動させ、上基準部材28および下基準部材30を介して、ベース2およびエンドエフェクタ3を一定の位置関係に連結する位置出し工程と、各パラレルリンク機構のエンコーダから、各リンク長を取得して制御部に記憶させる調整位置取得工程と、上基準部材28および下基準部材30をパラレルリンクステージから取り外す基準位置決め治具取り外し工程と、各パラレルリンク機構の各リンク長を、制御部に記憶された各リンク長に設定する位置初期化工程とを備える。
(もっと読む)
ゴニオステージ装置
【課題】従来より小型化が可能なゴニオステージ装置を提供する。
【解決手段】一部に球面部分112を有するテーブル部110と、前記球面部分112に当接して、前記テーブル部110を3点支持する支持部材211a〜211cと、前記テーブル部110に連結されて、前記テーブル部100のテーブル面111の向きを操作する面方向操作部220と、前記面方向操作部220の位置を変化させる面方向操作駆動部240と、前記テーブル部110と一体をなし、前記テーブル部110を、テーブル面111に垂直な軸を中心に回転させる回転操作部230と、前記回転操作部230の位置を変化させる回転操作駆動部250とを備える。
(もっと読む)
パラレルリンクステージの制御方法およびパラレルリンクステージ
【課題】パラレルリンクステージにおいて、必要以上に大きな信号線の引き回しスペースを必要とすることなく、信号線の摩擦による損傷を確実に防止する技術を提供する。
【解決手段】エンドエフェクタ1とベース6との間に設けられたパラレルリンク機構pのサーボモータ5a〜サーボモータ5fの各々を、サーボドライバ群20にて個別に閉ループ制御することでエンドエフェクタ1の変位を制御するパラレルリンクステージ7において、複数のサーボモータ5a〜サーボモータ5fに対応して設けられたスレーブモジュール8a〜スレーブモジュール8fと、サーボドライバ群20に接続されたマスタモジュール23との間をシリアル通信ケーブル10で接続し、サーボモータ5a〜サーボモータ5fからサーボドライバ群20へのモータ位置情報等のフィードバックをシリアル通信で行うようにした。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】各リンクの同一方向への加速度移動時におけるリンクヘッドの変位を抑制して良好なリンクヘッドの加速度動作を得ることができるパラレルメカニズムを提供する。
【解決手段】アクチュエータ356〜359は、リンク350A,350B,351A,351Bに移動力を付与する送りねじ356A〜359Aをそれぞれ含み、これら送りねじ356A〜359Aがリンク350A,350B,351A,351Bの他端の同一方向への加速度移動に伴いリンク集合体351のリンク351A,351Bの他端に作用するモーメントとリンク集合体350のリンク350A,350Bの他端に作用するモーメントとを互いに打ち消す位置に配置されている。
(もっと読む)
パラレルリンクステージの制御方法およびパラレルリンクステージの制御プログラムならびにパラレルリンクステージ
【課題】計算負荷を増大させることなく、また製作時の製造誤差等に影響されることなく、エンドエフェクタの位置制御精度を向上させることが可能なパラレルリンクステージの制御技術を提供する。
【解決手段】ベース6に支持された複数のアクチュエータ5a〜5f、リンク3a〜3f、駆動リンク4a〜4f、可動リンク2a〜2fからなるパラレルリンク機構pを介してエンドエフェクタ1を可動に支持するパラレルリンクステージ7において、コントローラ21に実装されたキャリブレーションプログラム22により、エンドエフェクタ1の目標位置と実際に測定された移動位置との移動誤差を測定して近似式51を成し、機構演算プログラム23は、この近似式51から目標位置に対応した移動誤差を得て補正後の目標位置を算出して移動指令を発行して、演算負荷を増大させることなく、エンドエフェクタ1を高精度に制御する。
(もっと読む)
ハイブリッドメカニズム及びこれを備えた工作機械
【課題】コストの低廉化を図ることができるとともに、作業者の操作負担を軽減することができるハイブリッドメカニズムを提供する。
【解決手段】絶対座標系で与えられるリンクヘッド301の回動位置及び移動位置に対応する指令値を、パラレルメカニズム300及びシリアルメカニズム400を含む機構全体の構成を規定する機構パラメータに基づいてヘッド駆動機構302,リンク駆動機構304,305(第1駆動機構)及びレール駆動機構(第2駆動機構)に対する指令値に変換し、第1駆動機構及び第2駆動機構を駆動制御する制御部を備え、制御部は、リンクヘッド301の回動位置及び移動位置に対応する指令値を第1駆動機構及び第2駆動機構に対する指令値に変換するにあたり、リンクヘッド301の回動位置及び移動位置から特定の演算式に基づいて第1駆動機構及び第2駆動機構の駆動量を演算する。
(もっと読む)
パラレルメカニズム及びそのキャリブレーション方法
【課題】機構パラメータの変動に応じてアクチュエータを駆動制御し、リンクヘッドの位置精度を高めることができるパラレルメカニズムを提供する。
【解決手段】直交座標系で与えられるリンクヘッドの回動位置及び移動位置に対応する指令値を機構パラメータに基づいてヘッド駆動機構302及びリンク駆動機構304,305に対する指令値に変換し、ヘッド駆動機構302及びリンク駆動機構304,305を制御する制御部を備え、この制御部は、リンクヘッド301に所定の回動量及び移動量で動作させたときのヘッド駆動機構302及びリンク駆動機構304,305に対する指令値とそのときの角度センサの出力値とに基づいて機構パラメータを補正する。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】リンクヘッドを移動させることができない特異点を無くしてリンクヘッドの可動範囲を広げることができるパラレルメカニズムを提供する。
【解決手段】リンクヘッド301の3自由度の動作が制御可能なパラレルメカニズム300であって、リンクヘッド301をY軸と直交するX軸に沿って移動させるためのヘッド駆動機構302と、一端がリンクヘッド301にリンク連結用回転ジョイント3030を介してY軸と直交する平面内で互いに回動可能に接続され、他端がY軸と平行な軸線の回りに回動可能にかつX軸と平行な軸線に沿って移動可能に支持された1対のリンク303A,303Bからなるリンク機構303と、1対のリンク303A,303Bの他端をX軸と平行な軸線に沿ってそれぞれ移動させるための1対のリンク駆動機構3034,305とを備えた。
(もっと読む)
移動ステージ装置
【課題】駆動部間の調整を不要にして製造コストを抑えるとともに、移動体が延在する方向に小型化が可能な移動ステージ装置を提供する。
【解決手段】台状の移動体2を台厚方向に沿う移動方向Hに平行移動させる移動ステージ装置1であって、移動体に対して移動方向に対向する位置に配置された基台部3と、基台部と移動体との間に配置され、移動方向に直交する方向に沿う軸線C1を中心として、基台部に回動可能に支持されたアーム部4と、軸線に平行な直線上に少なくとも2つ並んでアーム部に設けられ、移動体を前記移動方向に支持する第1の支持部5と、基台部と移動体との間に設けられ、移動体を移動方向のみに移動可能に支持し、かつ第1の支持部が並ぶ直線回りの移動体の回動を規制して支持する第2の支持部6と、基台部と移動体との間に配置され、アーム部に対して、軸線回りのモーメントを発生させる駆動力を作用させる駆動部7とを備える。
(もっと読む)
ステージ可動機構
【課題】
基部に対するステージ面を上下方向とピッチ方向、ロール方向に可動可能で、他の自由度には強く拘束され、かつ、アクチュエータへの力学的な負担が少ないステージの可動機構を、簡素で安価な構造で実現する。
【解決手段】
バネ性を有する素材がもつ弾性変形が許容される方向を活かすよう,板バネまたは曲げ棒バネなどのバネ材を用い、一つの間接部を有するくの字型の支持機構30〜33を構成し、これを二つ以上用いてステージ10と基部20とを弾性接続することで課題の自由度をもたらすステージ可動機構を構成している。同時に,くの字型を形成することで支持機構が弾性変形する際には,変位増加に対する反力が一定か減少するような逆バイアス特性がもたらされることで,アクチュエータを用いた場合の動作寿命を向上させることができる。また、センサ装置と組み合わせることによって3自由度の動作検出装置となる。
(もっと読む)
工作機械用アタッチメント
【課題】工作機械を用いたワークの微細加工を高精度に実現可能な工作機械用アタッチメントの提供。
【解決手段】工作機械に着脱可能に取り付けられる工作機械用アタッチメント6に、微細加工用工具5をワークに対してX,Y,Z方向に微動させる各微動駆動機構61,62,63を設けた。そして、Z微動駆動機構63により、微細加工用工具5を±Z方向へ往復微動させつつワークの微細加工を実施する。このため、微細加工用工具5を±Z方向に往復微動させることでワークを微細加工するので、微細加工用工具5をZ方向に粗動させてワークを微細加工する構成と比べてイナーシャを小さくすることができ、ワークの微細加工を高精度に実現できる。
(もっと読む)
工作機械、ワーク加工方法、および、微細加工物
【課題】複数のワークの微細加工を高精度にかつ高速に実現できる工作機械の提供。
【解決手段】工作機械1に、微細加工用工具5をワークWnに対してX,Y方向に微動させるX,Y微動駆動機構61,62と、このX,Y微動駆動機構61,62を有する工作機械用アタッチメント6をワークWnに対してX,Y,Z方向に粗動させる粗動駆動部3と、を設けている。そして、微細加工用工具5を微動させつつワークWnを微細加工して、微細加工用工具5を粗動させてワークWn間を移動させる。
(もっと読む)
パラレルメカニズムを備えた工作機械
【課題】小型のリンクヘッドを有するコンパクトなパラレルメカニズムを備えた工作機械を提供する。
【解決手段】リンクヘッド301を上面部及び下面部に配設された回転ジョイント355に回転可能に接続されたリンク集合体351により、直動ジョイント353を介して支持し、また、リンクヘッド301を上面部及び下面部に配設された回転ジョイント354に回転可能に接続されたリンク集合体350により支持する構成とし、リンクヘッド301の外部に加工ツール501を回転駆動するための回転モータを搭載する構成とした。
(もっと読む)
揺動軸受、それを用いたパラレルリンク機構、および移動ステージ
【課題】揺動軸受、それを用いたパラレルリンク機構、および移動ステージにおいて、小型化に適し、経時的にも円滑かつ高精度を維持することができるようにする。
【解決手段】球状ジョイント部30bが設けられた可動軸30と、軸受本体9との組合せからなる揺動軸受3であって、軸受本体9は、球状ジョイント部30bを球中心点回りにすべり支持する凹球面部8b、内側球面部7aと、可動軸30を揺動可能に挿通させるための開口部7cと、開口部7cの近傍の外表面側に、凹球面部8b、内側球面部7aと同心に形成された外側球面部7bと、凹球面部8bの一部に開口し、潤滑流体6を供給する流体供給溝8dとを備え、可動軸30は、球状ジョイント部30b近傍で、軸部30aに径方向に突出して固定され、開口部7cを覆った状態で外側球面部7bに摺動可能に密着された流体封止部材31を備える。
(もっと読む)
1 - 20 / 37
[ Back to top ]