
Fターム[3C269CC09]の内容
数値制御 (19,287) | 被制御軸の種類、形状 (1,508) | 多関節軸 (377)
Fターム[3C269CC09]の下位に属するFターム
腕の長さが可変であるもの (7)
Fターム[3C269CC09]に分類される特許
1 - 20 / 370
操作装置および可動機械制御システム
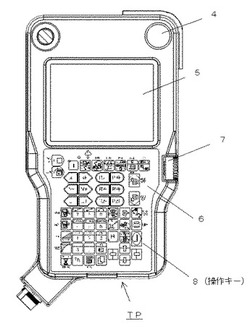
【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
(もっと読む)
少なくとも1つの共通の領域を含むそれぞれの作業スペースを有する少なくとも2台のロボットを制御する方法

【課題】2台のロボットを制御する方法であって、共通作業領域におけるロボット間の干渉を防止する。
【解決手段】作業スペースは、存在する物体を考慮して単純な形状によって構成された、禁止干渉領域、監視干渉領域、ハイブリッド干渉領域に分類される干渉領域を規定することによってモデル化される。各ロボット3,4は、ハイブリッド干渉領域に進入するときに、進入予約の第1出力信号、および進入/存在の警告の第2出力信号を中央電子制御ユニット7に送信するように構成され、ハイブリッド干渉領域のステータスは、ハイブリッド干渉領域に他のロボット3,4が存在するか否かに応じて、ハイブリッド干渉領域をロボット3,4に対して監視または禁止された状態にするロボット3,4への入力信号を、中央電子制御ユニット7から送信することによって、ロボット3,4の動作中に、各ロボット3,4に対して動的に変更される。
(もっと読む)
ロボット、ロボットの動作表示制御方法
【課題】操作者の安全性を高めるロボットを実現する。
【解決手段】ロボット200は、ロボットアーム220と、ロボットアーム220の動作を制御する制御部240と、アーム先端部226に配置され、且つ現在時刻のアーム先端部226の位置・姿勢から、制御部240によって生成されたアーム先端部226の軌道に基づき、現在時刻から次時刻におけるアーム先端部226の移動方向及び移動速度を表示する動作表示部100と、を備えている。動作表示部100は、表示画素101の集合であって、表示画素101をアーム先端部226の移動方向に沿って点灯または点滅させる。このことによって、操作者はアーム先端部226の移動方向・移動速度を認識することができる。
(もっと読む)
侵入検出装置,ロボット,侵入検出方法および侵入検出プログラム
【課題】特定領域への侵入を遅延無く検出する。
【解決手段】侵入検出装置は,侵入検出装置は,侵入を検出する境界に沿って前記境界に近接して配列された複数の光マークからなる光マーク列と,光らせる前記光マークを時刻によって異らせる制御信号であって,任意の時刻において,前記光マーク列の一部に対応する前記制御信号の一部は,前記光マーク列の他の一部に対応する前記制御信号の他の一部の誤り検出符号である前記制御信号を生成する点滅制御部と,前記光マーク列からの光を受光し前記光に応じた信号を出力する光センサーと,前記光センサーが出力する信号を前記光マーク毎に二値化した受光信号を生成し,前記光マーク列の他の一部に対応する前記受光信号の第一部分に基づいて前記誤り検出符号の検査値を生成し,前記光マーク列の一部に対応する前記受光信号の第二部分と前記検査値とを比較した結果に基づいて前記侵入を検出する検出部と,を備える。
(もっと読む)
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。CPU30は、駆動軸の制動を解除する期間の初期において所定期間にわたって電圧印加のON期間を維持する。
(もっと読む)
ロボット制御装置、外乱判定方法およびアクチュエータ制御方法
【課題】ロボットアームに加わる外乱を高精度に検出することが可能なロボット制御装置、外乱判定方法およびロボット制御方法。
【解決手段】実施形態のロボット制御装置は、アームの駆動軸を回転駆動するアクチュエータと、前記駆動軸の回転角度をサンプリング周期ごとに検出する第1検出部と、前記アクチュエータの駆動トルクの推定値と、前記駆動トルクの真値との差分を算出する算出部と、前記アームに加わる外乱を検出する第2検出部とを備え、前記第2検出部は、前記差分を変数とする時系列モデルのパラメータを推定し、前記パラメータを当てはめることで、第1サンプリング周期の当該時系列モデルを更新する更新部と、前記第1サンプリング周期の時系列モデルと前記第1サンプリング周期よりも過去の第2サンプリング周期の時系列モデルとを比較して、前記アームへの外乱の有無を判定する判定部とを備える。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
異常判定装置、駆動装置及びロボット装置
【課題】異常判定をより短時間に行う。
【解決手段】被駆動部を駆動する駆動装置を動作させる動作電流の電流値を複数の動作パターンを有する駆動装置の動作に応じて検出する検出部と、検出部によって検出された電流値と、動作パターンごとに関連付けて予め設定された動作電流の許容範囲とに基づいて、駆動装置の動作が異常であるか否かを判定する判定部とを備える。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
パラレルリンクロボットおよびその動作教示方法
【課題】パラレルリンクロボットのダイレクト教示方法は、直感的で分かりやすい教示方法である反面、ユーザの作業がそのまま転写されるため、パラレルリンクロボットが実現することが不可能な動作についても転写される場合がある。ユーザは、教示した動作がパラレルリンクロボットで実現可能な動作であることを確認するために、教示と再生とを繰り返すことで、時間を要する場合がある。
【解決手段】本発明のパラレルリンクロボットの動作教示方法は、パラレルリンクロボットの可動プレートをユーザが直接動かすことで教示された第1教示動作を取得し、前記パラレルリンクロボットの動力源である複数のモータが許容するトルクである許容トルクまたは/および前記複数のモータが許容する回転速度である許容回転速度に基づいて許容判定値を予め設定し、前記第1教示動作を前記パラレルリンクロボットの動作で実現可能か否かを前記許容判定値に基づいて判定する。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】角度センサーの回転角度検出データより、前記角度センサーを備えるアクチュエーターによって動作するアームの角速度を演算する第1演算部と、慣性センサーの角速度検出データより、前記基体連結装置および前記アーム連結装置を軸とする前記アクチュエーターにより作動する前記アームの角速度を演算する第2演算部と、前記アクチュエーターによって動作する前記アームの前記角速度および前記慣性センサーの前記角速度検出データによって演算された前記アームの前記角速度の差より、振動の周波数成分を前記アーム毎に抽出し、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部と、を備えるロボット装置。
(もっと読む)
ロボットの位置姿勢補間方法及びロボットの制御装置
【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法
【課題】誤った入力に基づいて、コントローラに操作情報が出力されることを防止できるタッチパネル式入力装置を提供する。
【解決手段】ティーチングペンダント3が備える表示部11の表示領域に選択ボタン表示領域22と確認メッセージ表示領域24とを分割配置し、確認メッセージ表示領域24を画面の上辺に沿うように寄せて配置し、選択ボタン表示領域22を画面の右辺に沿うように寄せて配置する。選択段階では、複数の選択ボタン21を選択ボタン表示領域22に表示させ、確定段階では、選択された候補を操作者に確認させるメッセージ23を確認メッセージ表示領域24に表示させると共に、確定入力を行うための確定ボタン26を選択ボタン表示領域22外の余白スペース25に配置する。更に、選択段階から確定段階に移行する際に複数の選択ボタン21の画像を消去する。
(もっと読む)
ロボットシステム
【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
制御方法及び制御装置
【課題】産業用ロボットなどの制御対象の周期的な挙動幅(往復移動の振幅)を、減速機にバックラッシュがない場合と同じにする、又は位置指令信号の振幅と同じにすることできる制御方法及び制御装置を提供する。
【解決手段】周期的な運動を行うアーム5のバックラッシュを補償しつつアーム5の位置制御を行う制御装置3において、アーム5の位置を指示する位置指令信号にバックラッシュを補償するバックラッシュ量信号をシフトしたうえで加算し、最終位置指令信号を生成して、生成した最終位置指令信号に基づいてアーム5の位置制御を行う制御部15を備える。
(もっと読む)
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
携帯遠隔操作装置およびロボットシステム
【課題】表示部へ表示された教示データから容易にコマンドを視認することができること。
【解決手段】所定の動作をロボットへ実行させる命令ごとに表示色を設定し、設定された表示色を命令に関連付けて記憶する。また、命令をロボットへ教示するティーチングによって作成された教示データを命令に関連付けられて記憶された表示色に基づいて表示部へ表示する。さらに、表示部へ表示された教示データの表示色を所定の操作によって設定された表示色へ一時的に変更して表示部へ表示するよう携帯遠隔操作装置およびロボットシステムを構成する。
(もっと読む)
溶接位置検出方法、及び溶接位置検出装置
【課題】
溶接線の進行方向が大きく変化するワークに対してセンシングを行う場合、進行方向の変化に応じてロボットの姿勢を変更する必要がある。このため、教示に時間を要したり、ロボットがワークや治具等と干渉したりする。
【解決手段】
マニピュレータM1に取付けられた溶接トーチ14に対して開先位置検出センサLSが可動機構62を介して設けられる。溶接線の進行方向が変化する場合は、開先位置検出センサLSの溶接トーチ14に対する相対位置であるセンシング位置を、ロボットの姿勢変更により変更するのではなく、可動機構62により変更するようにしている。教示工数低減、干渉低減を図ることができる。
(もっと読む)
1 - 20 / 370
[ Back to top ]