
Fターム[3C269EF69]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの作成に関する特徴 (739) | 形状モデルの利用生成 (296)
Fターム[3C269EF69]の下位に属するFターム
素材形状を利用するもの (59)
製品形状を利用するもの (136)
中間形状を生成するもの (27)
Fターム[3C269EF69]に分類される特許
1 - 20 / 74
工作物の機械加工のシミュレーション
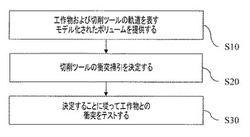
【課題】切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法を提供する。
【解決手段】工作物および切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、切削ツールの衝突掃引を決定するステップ(S20)であって、衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す、ステップ(S20)と、決定するステップ(S20)に従って工作物との衝突をテストするステップ(S30)と、を含む方法により、切削ツールによる工作物の機械加工のシミュレーションを向上させる。
(もっと読む)
工作機械における工作物の機械加工シーケンスシミュレーション装置

【課題】本発明は、工作機械の動作シーケンスのシミュレーションを可能にしさらにシミュレーションを改善した工作機械において、シーケンスのシミュレーション装置の提供を目的とする。
【解決手段】本発明は、工作機械における工作物を機械加工するためのシーケンスをシミュレーションするための装置に関し、全体的なシミュレーションアプローチを特徴とする。PLC制御手段723とPLCシーケンスシミュレーション手段725は、工作機械のPLC動作シーケンスをシミュレーションを支援し、これにより、全ての実質的な態様において、工作機械のリアルなシミュレーションを可能にする。その結果、特に訓練や機械稼働時間の判定中において、非常に有益である。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム
【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
工作機械における工具と工作物との間の意図しない衝突の回避方法
【課題】
工作物の短い工作時間を可能にする工作機械における、工作物と工具との間の意図しない衝突の回避方法ならびに工作機械の制御装置を提供すること。
【解決手段】
部分プログラム(3)の実行開始時に、部分プログラム(3)に基づく工具(18)と工作物(21)との間の相対運動を制御するための運動目標値(x,y,z,ov)の算定と、それらの算定された運動目標値(x,y,z,ov)に基づく工具(18)による工作物(21)の材料除去量(M)の算定とが開始され、工具モデル(WM)が算定され、その工具モデル(WM)が工作物モデル(WSM)と重なり合うか否かが検査され、重なり合うことが確認された際に工具(18)と工作物(21)との間の相対運動がその相対運動が停止するまで減速させられる。
(もっと読む)
干渉チェック装置及びプログラム
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
数値制御装置
【課題】測定対象物の計測作業をより簡易にでき得る数値制御装置を提供する。
【解決手段】3Dモデルを用いて干渉を検知する機能を有する数値制御装置は、その3Dモデルの位置情報が正確か否かの情報が属性情報として付与された構造体および移動体の3Dモデルに基づいて、これら3Dモデルの位置を演算する数値制御装置のシミュレーション部4'と、数値制御指令に基づいて、機械およびシミュレーション部を駆動するNC
装置部2'と、を備える。NC装置部2'は、前記3Dモデルの重なりが検知された場合に、当該重なりが生じた3Dモデルの位置情報が正確か否かを判断し、位置情報が正確と判断した場合は前記数値制御指令の実行中止を機械3およびシミュレーション部4'に指示し、前記位置情報が正確でないと判断した場合は警告を出力しつつ前記数値制御指令の実行続行を機械3およびシミュレーション部4'に指示する。
(もっと読む)
対象物の製造方法
【課題】構造特性と負荷環境とに耐えることができる層構造を提供する。
【解決手段】対象物の製造方法は、対象物の数学モデルは対象物外形状の分割した複数の有限要素に関連するフィールド{f}及びポテンシャル{x}の各数値を特定して生成し、各有限要素の素材の各物性値の対称性が特定され、関係式{f}=[k]{x}及び上記対称性に基づいて素材の物性マトリックス[k]を算出し、素材の物性値の係数を、素材の物性マトリックス[k]から有限要素毎に抽出し、抽出された素材物性値の係数と既知の素材物性値の係数とを一致するように比較し、製造設備を制御するための各製造パラメータを一致した素材物性値の各係数に基づいて決定する。
(もっと読む)
三次元造形方法
【課題】表面に孔及び/又は溝が形成されている造形対象物に対する三次元造形において、孔及び/又は溝の周辺における切削表面の破壊を伴わずに、効率的な切削加工を可能とする構成を提供すること。
【解決手段】表面に孔及び/又は溝が形成されている造形対象物2に対する回転工具3による三次元造形において、工具3が移動する二次元平面に孔及び/又は溝の形成領域4が存在する場合に、当該領域4における軌跡1を当該領域4の両外側に位置している軌跡1と同一の高さレベルを維持した状態にて連続して設定する一方、CADシステム又はCAMシステムによって、前記軌跡1を設定することに基づき、前記課題を達成し得る三次元造形方法。
(もっと読む)
作業マニピュレータのセンシング動作生成方法及びセンシング動作生成装置
【課題】円弧部分を有する作業ワークであっても、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】本発明の作業マニピュレータのセンシング動作生成方法は、円弧部分Cを有する作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する際に好適なものである。センシング動作生成方法は、作業ワークWの円弧部分Cが離散点Dで近似された離散ワークモデルDMにもとづいて、離散点D間が補間されたリアルワークモデルRMを推定し、推定されたリアルワークモデルRMをもとに作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
自動プログラミング装置、およびその動作プログラム
【課題】 旋回軸を有する動作の自由度の高いNC工作機械のNCプログラムを簡単な操作で生成できる自動プログラミング装置を提供すること。
【解決手段】 自動プログラミング装置101は、加工領域形状に対する工具姿勢を定義する工具姿勢定義部140を備え、さらにこの工具姿勢定義部140は、加工領域形状を構成する形状要素の情報から工具姿勢を決定する点を所定の方法により抽出する工具姿勢決定点抽出部と、工具姿勢を決定する点における工具姿勢を所定の方法により求める工具姿勢演算部を含んで構成されているので、旋回軸を有するNC工作機械の工具経路向けの工具姿勢を定義でき、CAMを用いなくても、簡単な操作でNCプログラムを生成することができる。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
加工シミュレーション装置、加工シミュレーション方法、プログラム、記録媒体
【課題】高速に計算を行うことができ、十分な精度が得られる加工シミュレーション装置等を提供する。
【解決手段】加工シミュレーション装置1は、工具形状データ、加工シミュレーション前のワーク形状データ、仕上がり形状データ、ホルダ形状データを記憶する記憶部9と、工具形状データと仕上がり形状データを用いて工具経路データを生成する工具経路生成部19と、ホルダ形状データと仕上がり形状データを用いてホルダが上記の仕上がり形状に干渉しないホルダ経路データを生成するホルダ経路生成部21と、工具経路データとホルダ経路データを用いてホルダが上記の仕上がり形状に干渉しないホルダ干渉回避工具経路データを生成するホルダ干渉回避工具経路生成部23と、工具形状データとホルダ干渉回避工具経路データを用いて加工シミュレーションを行い加工シミュレーション後のワーク形状データを生成する加工シミュレーション部25とを具備する。
(もっと読む)
材料取り合わせシステム
【課題】変形したベストフィット法を採用し、さらに、最後のほうにしわ寄せがくるのを改善して、材料取り合わせの最適化を図る。
【解決手段】材料を順に選択して、割り付け可能な製品を組み合わせて最適な割り付けを見つけ仮割り付けとする。この処理に変形したベストフィット法を採用する。材料を替えて同じ処理を繰り返す。このとき、材料に対して、常に最長の製品を最初に必ず割り付けるようにするといった条件設定をする。複数の仮割り付け結果を比較して、歩留まりの良いものを製品の割り付けデータに採用する。これを繰り返しながら、あと2回で終了するタイミングを検出する。あと2回分は、複数の割り付けパターン候補を取得して比較し、最適な割り付けパターンを採用する。
(もっと読む)
最適工程決定装置および最適工程決定方法
【課題】実加工時間以外の他の要因を考慮した上で、最も適切な工程集約を行うことにより、最適工程を決定することができる最適工程決定装置および方法を提供する。
【解決手段】最適工程決定装置は、工具、ホルダおよび工具突出量からなるツーリングを含む複数の個工程の情報と、複数の個工程の順序とを含む暫定工程を算出する暫定最適工程算出ステップと、選択された二つの暫定工程におけるツーリングの類似度を算出する類似度算出ステップと、類似度の高い暫定工程のうち一方の暫定工程におけるツーリングを、他方の暫定工程におけるツーリングに集約した場合の集約工程を複数算出する集約工程算出ステップと、それぞれの集約工程における実加工時間と、1つの暫定工程のツーリングを集約することに伴って短縮される単位集約短縮時間と、集約した暫定工程の数とに基づいて、複数の集約工程の中から最適工程を決定する最適工程決定ステップを実行する。
(もっと読む)
加工ユニットの動作を表示し、ユーザ入力から処理データを生成する仮想工作機械
作業スペース(30)及びこの作業スペースに配置された加工ユニット(36)を有する工作機械の制御システムの処理を容易にするため、制御システムは、処理データ及び記憶された機械モデル(48)に基づき、少なくとも作業スペース(30)の領域内において、可視化要素(G,FF)によって可視化ユニット(50)上で、仮想作業スペース(54)内に設けられた仮想加工ユニット(56)を有する仮想工作機械として実際の工作機械(12)を表示すると共に、仮想加工ユニットの機能を仮想機能として表示する可視化コントローラ(36)を備える。マニュアル対話処理を可能とする対話処理ユニット(80)は可視化ユニット(50)と関連付けされ、マニュアル対話処理によって工作機械の機能の関連性を可能とする機能選択ユニット(90)が可視化ユニット(50)と関連付けされ、関連した機能を考慮しながら、マニュアル対話処理に対応する処理データ(ML,MST)を生成すると共に、可視化要素(G,FF)を使用しながら、可視化ユニット(50)上で、マニュアル対話処理によって特定された機能を表示するために、処理データ(ML,MST)を可視化コントローラ(40)に対して転送する処理データ(ML,MST)を生成する機能データ生成ユニット(92)を備える。 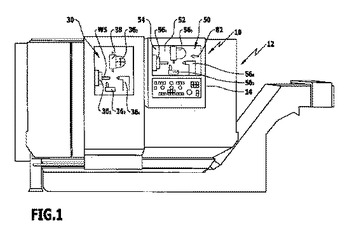 (もっと読む)
(もっと読む)
適応的にサンプリングされる距離場を用いて数値制御フライス加工をシミュレートするための方法
【課題】高精度に時間効率よくフライス加工をシミュレーションする。
【解決手段】物体を横切る経路に沿って或る形状を動かすことによって、その物体のフライス加工をシミュレートするための、プロセッサ上で実行される方法が提供される。物体を表現するために、複合的な適応的にサンプリングされる距離場(ADF)が生成され、その複合ADFは1組のセルを含む。複合ADF内の各セルは1組の距離場と、そのセル内の物体を再構成するための手続き型再構成法とを含む。形状は形状距離場によって表される。経路はパラメトリック関数によって表される。掃引容積再構成法に従って、経路に沿って形状を動かすことによって生成される掃引容積を表すために、掃引容積距離場が連続的に定義され、その掃引容積再構成法によって、サンプル点における掃引容積距離場が再構成される。複合ADFを編集して、掃引容積距離場を複合ADFに組み込み、シミュレートする。
(もっと読む)
数値制御データ作成装置
【課題】開先加工を含まないNC制御データをもとに、開先加工を含むNC制御データを容易に作成できる数値制御データ作成装置を提供する。
【解決手段】数値制御データ作成装置100は、レーザ加工用の数値制御データが入力されるデータ入力部1と、数値制御データによる加工経路を表示する表示部3と、表示部3に表示された加工経路において、開先加工箇所を選択し、その開先加工箇所における開先条件を入力するための操作入力部4と、加工条件を記憶している記憶部5と、操作入力部4により選択された開先加工箇所の形状を認識する形状認識部12と、認識された開先加工箇所の形状および開先条件に対応する加工条件を記憶部5から選択し、その加工条件を用いて加工するように、数値制御データを変換するデータ変換部13とを備えている。
(もっと読む)
自動プログラミング装置及びその動作プログラム
【課題】 従来のものより少ない情報量で多様な加工領域形状を定義することができる自動プログラミング装置を提供すること。
【解決手段】 データを取り込む入力装置111と、データを記憶する記憶装置と、記憶装置に記憶された底面形状の輪郭を構成する一連の稜線の稜線データ、及びこの稜線に関連した側面形状を特定する稜線の属性データにより、底面形状を定義する底面形状定義処理部131と、底面形状の稜線データ及び属性データとから特定される面を側面形状として生成する側面形状生成処理部132と、底面形状定義処理部131により定義された底面形状、及び側面形状生成処理部により生成された側面形状に基づいて加工領域形状を生成して記憶装置に記憶する加工領域形状生成処理部134と、を備えている。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、図面データ25を表示する表示部29と、表示部29上で参照マーク35を移動させる入力部22とを有している。特定領域設定部43は目標図形50に対して特定領域51を設定するとともに、通過位置設定部24は、図面データ25上の特定領域51に参照マーク35を一致させた場合に、当該特定領域51に対応する一の通過位置を定める。プログラム作成部31は、移動プログラム32を作成し、出力部33は、移動プログラム32をロボットコントローラ12に送信する。
(もっと読む)
マーキングデータ生成方法及びマーキング方法
【課題】作業効率を向上させると共にマーキング精度を向上させることを目的とする。
【解決手段】船殻部材に対する船殻部材同士の取付け位置及び複数の艤装部品の取付け位置を示す2次元の艤装部品取付け位置データに基づいて、船殻部材又は艤装部品毎にその取付け位置が示された複数のレイヤー情報を生成し、鋼板を切断して船殻部材を生成するための3次元の船殻部材データに基づいて、レイヤー情報を3次元情報に変換し、3次元情報を船殻部材毎の情報に切り出すことにより、艤装部品毎の取付け位置をマーキングするためのマーキングデータを生成する。
(もっと読む)
1 - 20 / 74
[ Back to top ]