
Fターム[3C269MN11]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318)
Fターム[3C269MN11]の下位に属するFターム
動作位置、動作範囲の監視 (324)
動作速度、加速度の監視 (168)
位置、速度、加速度以外の変量の監視 (385)
各種オンオフ信号の監視 (68)
各種事象の発生回数の監視を行うもの (9)
帰還信号の確認、分析 (29)
複数の信号の合理性判断を行うもの (26)
シミュレータ、モデルの利用 (228)
推論、AIの利用 (21)
画像信号の利用 (48)
音声信号の利用 (9)
Fターム[3C269MN11]に分類される特許
1 - 3 / 3
異常時モータ減速停止制御手段を有する数値制御装置
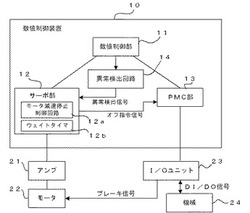
【課題】数値制御部の異常時にモータを短時間で停止させる。また、モータにブレーキをかけるタイミングも制御可能とする。
【解決手段】数値制御装置10が稼働中、数値制御部11の異常を異常検出回路14で検出する。異常検出回路14の異常検出信号で、サーボ部12のモータ減速停止制御回路12aが作動し、速度指令「0」で速度制御を行いモータ22を停止させる。また、モータ22の実速度が設定速度以下になると、DO信号をオフにさせるオフ指令信号をPMC部13に出力する。PMC部13は、このオフ指令信号により、ブレーキ制御用DOのオフまたは全てのDO信号をオフとする。これにより、モータ22に設けられたブレーキ装置のブレーキがかかり、モータ22を停止させる。モータ22は減速停止制御されるから、最短時間で停止できる。また、ブレーキをかけるタイミングも設定制御できる。
(もっと読む)
工作機械の起動制限システム

【課題】工作機械の当初の設置場所から離れた場所への不適切な移設を防止すると共に、機械の移設先や移設履歴を知ることもできる技術手段を提供する。
【解決手段】GPSを利用して機械の設置位置を検出し、検出された設置位置が予め登録された許容領域を越えているときに機械の起動ないし機能に制限をかける。起動制限システムは、GPSアンテナ1と、エリア設定手段5と、NC装置4に工作機械3の起動指令が与えられたときにGPS信号を受信して現在位置を演算する現在位置演算手段2と、現在位置がエリア設定手段5に設定された許可エリアを越えているときにNC装置4に動作制限信号を出力する制限情報出力手段7と、所定の解除指令を受けて前記動作制限信号に基づく動作制限を解除する制限解除手段8とを備えている。
(もっと読む)
制御装置の内部データの観測装置
【課題】制御装置の内部データを詳細に観測できるデータ観測装置を提供する。
【解決手段】サーボモータまたはスピンドルモータを少なくとも一つ有する工作機械、産業機械または産業用ロボットを制御する制御装置2の内部データを観測するデータ観測装置1であって、観測の対象とする観測データを指定する手段11と、観測データの取得を開始および/または終了するトリガのタイミングを決定するために用いるトリガデータを指定する手段12と、トリガデータの値に基づいてトリガを掛けるトリガ条件を設定する手段13と、トリガ条件が満たされているか否かの判断を、制御装置2の内部で行って、観測データの値の取得を開始あるいは終了し、取得した観測データを表示する手段14と、を備える。
(もっと読む)
1 - 3 / 3
[ Back to top ]