
Fターム[3C269MN32]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 各種オンオフ信号の監視 (68)
Fターム[3C269MN32]に分類される特許
1 - 20 / 68
手動送り速度を変更可能な数値制御装置
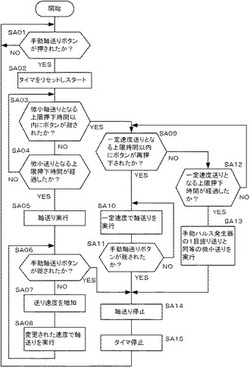
【課題】ボタンの押し方によって、ダイナミックに手動送り速度を変更可能にし、軸の位置決めを容易に行うことが可能な手動送り速度を変更可能な数値制御装置。
【解決手段】手動軸送りボタン(以下、「BU」という)が押されると、押下時間を判断するためのタイマが起動する。BUが微小軸送りとなる上限押下時間より長く押され続けると、押されている間、送り速度を連続して増加させながら軸の移動を行なう。BUが離されると、軸移動を停止し、タイマを停止する。BUが微小軸送りとなる上限押下時間より短く押された場合、一定速度送りとなる上限時間以内にBUが再押下されないと、手動パルス発生器の1目盛りと同等の微小送りを行なう。移動が完了すると、軸移動を停止し、タイマを停止する。一定速度送りとなる上限時間以内にBUが再押下されると、押されている間、一定速度で軸の移動を行なう。BUが離されると、軸移動を停止し、タイマを停止する。
(もっと読む)
ロボットの電磁ブレーキ制御装置

【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。CPU30は、駆動軸の制動を解除する期間の初期において所定期間にわたって電圧印加のON期間を維持する。
(もっと読む)
エアバランスを利用して退避動作を行う位置決め装置
【課題】外部の動力に依存することなく、新たな制御回路を追加することもなく、ブレーキが動作する条件で、確実に垂直軸に退避動作をさせることができる位置決め装置を提供すること。
【解決手段】固定部20に対して可動部21が鉛直方向に対して上下に移動する構造であり、圧力調整装置46はエア源(コンプレッサ)44に接続され、圧縮空気がエア配管60を介してエア源44から圧力調整装置46に供給され、圧力調整装置46に供給された圧縮空気はエアバランスの配管80を介してエアバランスに供給され、制御装置40からの圧力調整を指令する電気信号が圧力調整の信号線80を経由して圧力調整装置46に入力し、圧力調整装置46の動作が制御され、非常停止スイッチ42は手動で緊急停止させるためのスイッチであり、これが押されると制御装置40の制御が切れて非常停止状態となる。
(もっと読む)
ユーザインタフェースが変更可能な数値制御装置
【課題】ユーザインタフェースが変更可能な数値制御装置を提供する。
【解決手段】保守作業を行うにあたり、画面切換情報記憶した外部記憶媒体9を装着する。数値制御装置100は、工作機械120の非常停止信号121、または、安全状態信号122の信号入力11を確認し、非常停止信号121、あるいは、安全状態信号122の入力が無い状態で強制ボタンの押下の何れか1つによって、数値制御装置100は非常停止状態にされ(符号8参照)、工作機械120からの安全状態信号122の入力が有れば、数値制御装置100は非常停止状態にされず、ユーザインタフェース表示に用いられる画面テーブルが通常作業用画面テーブル6から保守作業用画面テーブル7に切り換わり(図5の切換12)、表示装置13に表示されるユーザインタフェース表示が、通常作業用インタフェース表示14から保守作業用ユーザインタフェース表示15に切り換わる。
(もっと読む)
ブロック実行順表示装置
【課題】シーケンスプログラムおよびNCプログラムからなる制御プログラムの全体を構造的かつ視覚的に表現し、制御プログラムの実行順序および実行状態を容易に把握することができるブロック実行順表示装置を提供する。
【解決手段】数値制御およびシーケンス制御を備えた生産装置50と、シーケンスプログラム13aを実行するプログラマブルコントローラ10と、NCプログラム23aを実行する数値制御装置20と、シーケンス機能ブロックおよびNCプログラム実行ブロックを実行順に配列したブロック実行順配列を表示するブロック実行順配列表示手段116aと、配列要素の一つを選択する選択手段と、選択手段によってNCプログラム実行ブロックが選択されると、複数のNC機能ブロックを実行順に配列したNC機能ブロック実行順配列を表示するNC機能ブロック実行順配列表示手段116cを備える。
(もっと読む)
産業用ロボット
【課題】アラーム発生時にどのデータを記録するかは予め設定されており、運転稼動中に運転を停止させることなく、どのデータを記録するのか設定することができない。
【解決手段】ロボットと、前記ロボットを制御するロボット制御装置と、前記ロボットを操作するティーチペンダントとを備えた産業用ロボットであって、前記ロボット制御装置および/または前記ティーチペンダントは記録メディアスロットを有し、前記記録メディアスロットに接続された記録メディア内に記憶されており前記産業用ロボットの動作中に記憶する情報を定義した記録方法ファイルを前記記録メディアの接続時に自動的に読み出し、前記記録方法ファイルを構成しており情報を記録するトリガとなる記録トリガの監視や記録した情報の書き出しを含む処理を行う解析用機能の実行を自動的に開始する。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】電源スイッチがオンされると、スイッチング制御回路が動作を開始し、コンバータ回路のスイッチング素子のオンオフ制御で制御用電源がCPUに供給され、自己の動作電源をコンバータ回路からダイオードを介して給電する。CPUにより、コンタクタがオンされてロボット用電力が供給される。電源スイッチがオフされると、CPUにより、給電監視手段によるダイオードブリッジへの給電停止の検出をもってスイッチのオフ状態が判断され、平滑コンデンサの充電電荷を電源として動作する期間中に、ロボット本体の停止制御の実行後に前記コンタクタがオフされる。
(もっと読む)
工作機械
【課題】長期間の放置に伴う主軸の焼き付を含めた破損要因をユーザ側で回避する。
【解決手段】マシニングセンタ1は、装置本体への電源供給をON/OFFする電源スイッチ56と、被加工物を加工する工具を備えた主軸9を回転駆動する主軸モータ74と、電源スイッチ56をOFFしている期間又は主軸モータ74が駆動していない期間の少なくとも何れか一方の期間を放置期間としてカウントするカウンタ55と、放置期間が予め規定した期間を超えているか否かを判定する数値制御装置50と、数値制御装置50が規定期間を超えていると判定した場合にその旨をユーザに報知するディスプレイ82と、を有し、数値制御装置50は、規定期間を超えていると判定した場合に主軸モータ74の駆動を制限する。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
数値制御装置
【課題】測定対象物の計測作業をより簡易にでき得る数値制御装置を提供する。
【解決手段】3Dモデルを用いて干渉を検知する機能を有する数値制御装置は、その3Dモデルの位置情報が正確か否かの情報が属性情報として付与された構造体および移動体の3Dモデルに基づいて、これら3Dモデルの位置を演算する数値制御装置のシミュレーション部4'と、数値制御指令に基づいて、機械およびシミュレーション部を駆動するNC
装置部2'と、を備える。NC装置部2'は、前記3Dモデルの重なりが検知された場合に、当該重なりが生じた3Dモデルの位置情報が正確か否かを判断し、位置情報が正確と判断した場合は前記数値制御指令の実行中止を機械3およびシミュレーション部4'に指示し、前記位置情報が正確でないと判断した場合は警告を出力しつつ前記数値制御指令の実行続行を機械3およびシミュレーション部4'に指示する。
(もっと読む)
数値制御装置、制御プログラム及び記憶媒体
【課題】複数の操作パネルの表示を消灯した場合であっても、作業者が操作可能である操作パネルを探す必要がなく、作業効率の低下を防ぐことができる数値制御装置、制御プログラム及び記憶媒体を提供する。
【解決手段】CPUは、サブパネルの操作が有効であるときに、作業者によるサブパネルの操作がない時間が所定時間以上であるか否か判断する(S50)。作業者によるサブパネルの操作がない時間が所定時間以上であると判断した場合、CPUはメインパネル及びサブパネルのディスプレイを消灯する(S60)。CPUは、メインパネル及びサブパネルのディスプレイを消灯した場合に、サブパネルの操作を無効に切り替え、メインパネルの操作を有効にする(S70)。
(もっと読む)
制御システム及びこの制御システムに用いる位置推定方法
【課題】サンプリング周期を細かくすることなく、モータの速度変動等に精度よく対応することが可能な制御システム及びこの制御システムに用いる位置推定方法を提供する。
【解決手段】第2モータ43と、第2モータ43の回転角度に基づくウェハのノッチの位置データを所定の周期で検出する第2エンコーダ44と、第2モータ43をサーボ制御するサーボ制御器32と、サーボ制御器32に対して動作指令を発する位置制御部2と、を有する制御システム1において、位置制御部2は、サーボ制御器32の動作指令を生成するとともに、所定周期で第2エンコーダ44から取得した位置データを取得時刻と共に記憶し、時刻tにおける被制御体の位置f(t)を位置データに基づいてn次の多項式で表し、n次の多項式補間により任意の時刻におけるウェハ(ノッチ)の位置を推定する。
(もっと読む)
数値制御装置
【課題】工作機械においてワークの加工時における移動対象物の通常の移送とは別にその移動対象物の速度変化を伴う動作を実施する場合に、移動対象物が加工指令プログラムによって指示される加工パスからずれるのを防ぎつつ、その速度変化を伴う動作が指示されてからその動作が実行されるまでの応答性を向上する。
【解決手段】数値制御装置2では、演算部12は、特別指令入力装置122に特別指令が入力されたことに応じて、設定単位時間の長さをその特別指令の入力直前の状態における長さからその特別指令が指示する移動対象物の速度変化に応じた長さに変化させ、その変化させた後の設定単位時間当たりの各支持体102b,106a,108a,110aの対応する移動軸方向への移動量を加工パスから算出する。
(もっと読む)
パソコン機能を有する数値制御装置
【課題】パソコンのオペレーティングシステムが起動しない場合でも、数値制御装置の画面を表示する。
【解決手段】パソコン100に接続された記憶装置は、領域1に汎用OSと表示アプリを、領域2に保守用OSと数値制御装置の画面を表示する表示アプリを格納する。(1)数値制御装置200は、パソコン100を起動する信号をパソコン100に送る。(2)パソコン100は、保守用OSを起動し、従来通りに汎用OSを起動する。(3)汎用OSが起動した場合、数値制御装置200に起動完了を通知し、表示アプリを実行する。(4)パソコン100からの起動完了の通知が無い場合、数値制御装置200は、パソコン100をリセットし再起動する。(5)数値制御装置200は、保守用OSで画面を表示するための起動信号をパソコン100に送信する。(6)パソコン100は再起動後、保守用OSを起動し、保守用表示アプリを実行してCNC画面を表示する。
(もっと読む)
複数軸駆動装置、複数軸駆動機械、及び複数軸駆動装置の駆動制御方法
【課題】複数のモータ制御回路のいずれかに異常が生じた場合であっても、複数の駆動軸の軸間誤差による締結部の過大な内部応力の発生を防止する。
【解決手段】モータ2の駆動を制御するモータ制御回路6を設け、共通の目標駆動位置指令とモータ3の駆動位置の位置偏差を保持する位置偏差カウンタ50と、その位置偏差を少なくするようモータ3の駆動を制御するための位置制御部202とを備えたモータ制御回路7を設け、モータ制御回路6は、異常通知信号を出力する異常検出部107と、異常検出されたときにモータ2の駆動を停止する停止制御手段とを有し、モータ制御回路7は、異常通知信号が入力された際に目標駆動位置指令に代えて、モータ2の駆動位置が位置制御部202へ入力されるように信号経路を切り替える切替スイッチSW2を有し、位置制御部202は、異常通知信号が入力された際に位置偏差カウンタ50の位置偏差をリセットする。
(もっと読む)
加工装置
【課題】 メイン操作パネルから離れた場所でメンテナンス作業を行う場合の便宜性を図った加工装置を提供することである。
【解決手段】 制御手段に接続された操作キーを有する操作パネルによって操作され、側面及び/又は背面にオペレータがメンテナンス作業を行う作業領域を備えた加工装置であって、該操作パネルは加工装置の正面に設けられたメイン操作パネルと、該作業領域近傍に設けられたメンテナンス操作パネルとからなることを特徴とする。
(もっと読む)
停電時制御装置
【課題】工作機械で停電時の制御を行なう停電時制御装置において、抵抗放電ユニットや無停電電源装置を追加することなく、ワークと工具とを干渉しない領域まで退避させることによって、ワークまたは工具の破損を回避することができる。
【解決手段】入力電源1を監視して、停電を検出した場合には、サーボモータ用アンプ3,4にサーボモータ7,8の制御状態のまま減速停止を指令するとともに、スピンドルモータ9に通電遮断を指令する停電検出部10’と、前記停電検出部10’からの停電検出信号に応じてパワー回路2とサーボモータ用アンプ3,4とスピンドルモータ用アンプ5の直流電圧低下異常のアラームしきい値を通常運転時の値から停電時の値へと変更するアラームしきい値変更部11と、前記停電検出部10’からの停電検出信号に応じてあらかじめ規定した微小距離だけサーボモータ用アンプ3,4に退避動作を指令する退避動作指令部12を設ける。
(もっと読む)
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
操作装置と可動機械制御装置とを非接続状態としても可動機械を稼働させる場合において、接続状態に戻す際に、非常停止機能の安全性を確認するために可動機械を停止する必要があった。
【解決手段】
半導体スイッチ34,34Aは、教示操作装置50が非接続状態において、オン作動すると、リレーRY1,RY3を励磁して非常停止スイッチ回路SC1,SC2が外されたことによるロボットRの停止を無効化する。診断回路40,40Aは、半導体スイッチ34,34Aがオン作動している期間に、メーク接点RY1a,RY3aがオフ作動しない範囲で半導体スイッチ34,34Aの診断を行う。教示操作装置50を接続状態に戻す際に可動機械を停止することなく非常停止機能の安全性を診断することができる。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
非常停止SWを備えた着脱可能な教示操作装置を有する可動機械制御システムにおいて、非常停止の原因が、非常停止SWの操作によるものか、回路の断線によるものかを容易に確認できない。
【解決手段】
並列回路部Kは、検出器32が教示操作装置50の接続を検出したときに閉成する半導体スイッチ41とコンデンサCの直列回路に対して並列に接続されたメーク接点RY1aを備える。パルス信号生成回路42は並列回路部Kに対して「H」信号、及びパルス信号を印加する。判定回路46は、「H」信号、及びパルス信号(論理信号)が印加された状態で並列回路部Kから出力される信号の論理状態に基づいて、ロボットRの非常停止が、並列回路部Kの断線によるものか、非常停止スイッチ52の操作によるものかを判定する。
(もっと読む)
1 - 20 / 68
[ Back to top ]