
Fターム[3C269QB14]の内容
数値制御 (19,287) | 演算手段の構成、機能 (558) | サブルーチンの利用 (30)
Fターム[3C269QB14]に分類される特許
1 - 20 / 30
レーザ加工方法、装置及びプログラム
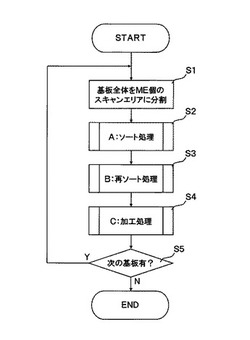
【課題】加工経路を最短にした場合であっても、熱による穴径のバラツキ量を最小限に抑え、加工品質を向上させる。
【解決手段】レーザ光を走査させる前記プリント基板を複数のスキャンエリアに分割し(S1)、スキャンエリア内の穴あけの順番を走査経路の距離が最短となるように並べ替え(S2)、並べ替えられた穴のうち、第N番目の穴と第N+1番目の穴(ただし、Nは、「1≦N≦あける穴の最大数−1」の整数)との距離が予め設定された閾値未満と判断され、かつ第N+1番目の穴が前記あける穴の最大数でないと判断された場合、第N+1番目の穴と第N+2番目の穴との順序を入れ替え(S3)、N番目の穴と入れ替えられた第N+1番目の穴との距離が閾値未満と判断された場合、第N番目の穴を加工した後、予め設定された放熱時間Tだけ加工を停止させ、その後、加工する(S4)。
(もっと読む)
速度監視装置

【課題】低い分解能の位置センサが使用でき、かつ誤検出せずに高速応答可能な速度監視装置を提供する。
【解決手段】速度監視装置は、記憶手段に、許容移動マージンPMと、1周期期間で許容される前記可動部の最大移動距離である比較速度量VCと、現在の時刻tからM周期前までにおける前記可動部の位置データP(t−nT)(nは、M以下の自然数)と、を記憶しておく。速度判定の際は、1からMまでのすべての整数nに対して、|P(t)−P(t−nT)|>VC*n+PMの成否を判定し(STEP6)、当該不等式が成立した場合には、速度超過と判定する(STEP20)。
(もっと読む)
数値制御装置および加工プログラム生成方法
【課題】軸名称の変更に柔軟に対応できる数値制御装置を得ること。
【解決手段】数値制御装置は、加工設定ユニットによる加工形状の入力のほかに、当該加工形状を加工する回転軸に対する設定内容を、前記設定対象の回転軸を指定するテーブル選択ユニットと、前記設定内容を前記設定対象の回転軸を指定することなく記述した補助ユニットと、に分けて受け付ける。
(もっと読む)
工作機械用制御装置
【課題】工作機械を試験する前に作業者に加工プログラムの実行順を入力させる作業負担を回避して簡便に加工プログラムのデバッグを実現する工作機械用制御装置を提供すること。
【解決手段】系統番号1、2、3の小さい順に加工プログラムブロックS1−1等を直列に実行するとともに同時に並行して実行すべき加工プログラムブロックS1−4、2−3、3−3を自動的に並行して同時に実行してデバッグを実行する工作機械用制御装置100。
(もっと読む)
工作機械
【課題】長期間の放置に伴う主軸の焼き付を含めた破損要因をユーザ側で回避する。
【解決手段】マシニングセンタ1は、装置本体への電源供給をON/OFFする電源スイッチ56と、被加工物を加工する工具を備えた主軸9を回転駆動する主軸モータ74と、電源スイッチ56をOFFしている期間又は主軸モータ74が駆動していない期間の少なくとも何れか一方の期間を放置期間としてカウントするカウンタ55と、放置期間が予め規定した期間を超えているか否かを判定する数値制御装置50と、数値制御装置50が規定期間を超えていると判定した場合にその旨をユーザに報知するディスプレイ82と、を有し、数値制御装置50は、規定期間を超えていると判定した場合に主軸モータ74の駆動を制限する。
(もっと読む)
プリプレグテープ並びにテープ制御情報設定方法
【課題】プリプレグテープの貼着時に、様々な曲面に対応して皺無く貼着や積層を図ることを提供する。
【解決手段】テープ幅を等分した複数条のテープ分割体に分断され、三次元に湾曲した曲面に貼着されるプリプレグテープを用いる。このプリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法は、プリプレグテープが貼着される曲面に設定されるレイアップパスを取得するレイアップパス取得ステップS1、S6と、レイアップパス取得ステップS1、S6で取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップS101と、演算開始点を通り且つレイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップS7とを備えている。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
工作機械の制御方法、および、それに対する装置
【課題】工作機械の数値制御において、CAD/CAM環境内でカッターによる機械加工プログラムと検査ルーチンの創成を統合することにより、検査ルーチンを速く行うことができるようにする。
【解決手段】工作機械における測定用プローブ30の検査経路を作成する方法が、検査される被加工物の幾何学的形体を選択可能であるプログラム、例えば、改良型CAM用のエディタープログラム44を実行させるステップを含んで開示されている。一度選択されたプログラムは、工作機械の数値制御(NC)に読み込むためのソフトウェアに含まれている測定用プローブ経路を作り出すだろう。そのソフトウェアは、NCにより読み取り可能、あるいは、NCコントローラに接続されるプロセッサー20で使用する読み取り不可の命令として書き込まれる検査経路用命令と一緒に切削命令を有し、好ましくは、そのNCと同時に動作する。
(もっと読む)
測定プログラムのチェック方法及び測定機能を有する機械
【課題】動作内容を容易にチェックすることができ、信頼性の高い測定を行うことができる測定プログラムのチェック方法及び測定機能を有する機械を提供する。
【解決手段】測定プログラムの動作チェックをするチェックモードを選択して測定プログラムを起動し、表示手段60の画面上に文字で表示された測定プログラムの内容と画面上に図形、文字又は記号で表示された測定指令の内容とをチェックする。
(もっと読む)
ロボットシステムに教示する方法
最初に、対象物モデルライブラリ及び作業モジュールライブラリを提供する。対象物モデルライブラリは、処理すべき実際の対象物に幾何学的に類似する少なくとも1つの対象物モデルを含む。作業モジュールライブラリは、行うべき各作業用の少なくとも1つの作業モジュールを含む。それから、処理すべき各実際の対象物に対して、対象物モデルライブラリにおける対象物モデルとの関連により、及び、対象物モデルの幾何学的パラメータの明細により、仮想対象物を定義付けする。その後、行うべき各作業に対して、作業モジュールライブラリから作業モジュールを選択すると共に、その作業パラメータを特定することにより、その操作を定義付けする。随意に、定義付けされた各仮想対象物に対して、その仮想対象物には、対応する実際の対象物を前もって撮像した少なくとも1つの二次元画像を関係づける。  (もっと読む)
(もっと読む)
プログラム作成支援方法、プログラム及びプログラム作成支援装置
【課題】プログラムを効率よく作成する。
【解決手段】プログラムを所定のブロックに分け、ブロック毎に命令文字列群であるブロック別文字列54と、所定の命令文字列である開始文字列と、終了文字列とを有するブロック別検索範囲53が記憶部50に格納されており、ロボット動作プログラム作成装置1が、処理の対象となっているブロック別文字列54において、ブロック別検索範囲の開始文字列と、終了文字列に挟まれた検索文字列を検出し、この検索文字列を強調表示して表示部14に表示させる。
(もっと読む)
部品プログラムの作成のための方法
【課題】工作機械のための部品プログラムの簡単な作成を可能にする。
【解決手段】部品プログラム21が制御命令を有し、制御命令に基づいて制御装置9によって工具16の運動が制御可能であり、工具の運動および加工工程に関する情報を含む運動情報22が読み込まれる部品プログラム21の作成方法に関する。制御装置9において特定の実行すべき加工工程のために制御サブプログラム11a,11bを指定する使用可能性情報23が読み込まれ、使用可能な制御サブプログラム11a,11bおよび運動情報22に基づいて、実行すべき加工工程のために当該加工工程に付属する制御サブプログラム11a,11bが使用可能である場合に、当該加工工程に付属する制御サブプログラム11a,11bの呼出しのための制御サブプログラム呼出し要求が制御命令として発生させられる。
(もっと読む)
機械加工装置、機械加工装置の回転数演算装置、機械加工装置のびびり振動評価装置および機械加工装置のびびり振動評価方法
【課題】
切削加工時の回転数を必要以上に落とすことなく、びびり振動を低減させる。
【解決手段】
マシニングセンタ2のびびり振動は、X軸加速度センサ10およびY軸加速度センサ12によって検出される。検出されたびびり振動によって、びびり振動の周波数が演算される。びびり振動の周波数より、びびり振動を低減することのできるエンドミル8の回転数が演算される。
(もっと読む)
多関節ロボット
【課題】目標位置および目標姿勢に到達するように移動可能な多関節ロボットの提供。
【解決手段】関節アームは、複数の関節により直列に連結された複数のリンクを有している。順運動学演算部22は、パルスエンコーダ16a〜16fにより検出された各リンクの回転角度に基づき、関節アームの先端部の現在位置および現在姿勢を算出する。回転角更新部25は、算出された関節アームの先端部の現在位置および現在姿勢の、関節アームの先端部の目標位置および目標姿勢に対する偏差が所定値以下となるまで、繰り返してリンクの回転角度を更新し、偏差が所定値以下となった場合、更新された回転角度に基づきリンクは回転される。偏差判定部23は、偏差が所定値以下でなく、かつ、修正角度の算出回数が所定回数を超えた場合には、次回に算出される偏差を減少させ、減少された偏差が所定値以下であるか否かを判断する。
(もっと読む)
マシニングセンタの工具交換システム
【課題】工具交換装置を有するマニシングセンタの機能を拡張して高品質の平面が得られるようにする。
【解決手段】マニシングセンタの工具交換装置マガジンに、回転工具と非回転単一刃工具を収納し、回転工具で加工した後に、被加工物の取り付け替えを行なうことなく非回転単一刃工具によってプレーナ加工を行い、回転工具の軌跡痕を平滑にしたり、回転工具では加工困難な溝、角部、刻線、ねじ等をXYZRの四軸制御により加工する工具交換システムを提供して目的を達する。
(もっと読む)
溶接検査方法、溶接検査装置、溶接検査プログラム
【課題】CADシステムによらず溶接の適否を検査可能とすることを目的とする。
【解決手段】溶接の適否を検査する溶接検査装置であって、複数の基準溶接打点に関するデータを記憶した記憶部と、複数の実溶接打点に関するデータの入力を受け付ける入力部と、記憶部に記憶された基準溶接打点に関するデータ、及び前記入力部を通じて受け付けた実溶接打点に関するデータに基づいて、前記基準側と前記ロボット側の双方の図形パターンが、類似する図形パターンとなる溶接打点の組み合わせを決定する処理を行う組合決定手段と、前記類似する図形パターンを構成する組み合わせとして決定された基準側、ロボット側双方の溶接打点に基づいて、前記基準側の打点群に対して前記ロボット側の打点群を位置合わせする処理を行う位置合わせ手段と、前記位置合わせ後、前記基準溶接打点とそれに対応する実溶接打点とを比較することで溶接の適否を検査する検査手段と、からなることを特徴とする。
(もっと読む)
工具衝突防止装置、工具衝突防止方法、およびNCプログラム
【課題】処理負担が少なく、かつ工作機械の機能を問わず加工動作中における衝突判定を可能する工具衝突防止装置を提供する。
【解決手段】工具衝突防止装置200は、衝突判定に関する開始情報を工作機械に出力させるコードが記述された情報出力ブロック501、502を、衝突判定トリガー部401、402の直前に挿入することにより処理後プログラム500を生成し、工作機械100から開始情報を受信すると、開始情報または定期的に工作機械100から取得する情報により決定された工具の現在位置および移動予定位置と、ワーク102の形状をスキャンすることにより得たワーク102の形状とに基づいて工具101とワーク102との衝突判定を開始し、判定結果に応じた処理を行う。
(もっと読む)
数値制御装置、数値制御プログラム及び数値制御プログラムを記憶した記憶媒体
【課題】所定の軸の駆動を停止させて工作機械を動作させる数値制御装置を提供する。
【解決手段】加工プログラムに「M300」指令があれば主軸フラグ「1」とする。「M301」指令があれば主軸フラグを「0」とする。「M302」指令があればテーブルフラグを「1」とする。「M303」指令があればテーブルフラグを「0」とする。主軸フラグが「1」、テーブルフラグが「1」ならば(S31:YES、S32:YES)、主軸の回転、テーブルの移動を禁止して処理を実行する。主軸フラグが「1」、テーブルフラグが「0」ならば(S31:YES、S32:NO)、主軸の回転を禁止して処理を実行する。主軸フラグが「0」、テーブルフラグが「1」ならば(S31:NO、S33:YES)、テーブルの移動を禁止して処理を実行する。主軸フラグもテーブルフラグも「0」ならば(S31:NO、S33:NO)、通常通り指示に応じた処理を実行する。
(もっと読む)
ロボットによるパレタイジング作業のためのロボットプログラミング装置
【課題】パレタイジング作業のプログラムの作成に必要な実機ロボットの操作を削減し、パレタイジングプログラムの作成に要する時間を短縮することを可能にしたロボットプログラミング装置を提供する。
【解決手段】ロボットプログラミング装置は、複数種類の荷物、コンベア、判別装置、ロボット及び複数のパレットの3次元モデルを記憶する記憶部と、記憶部に記憶された3次元モデルのレイアウトを仮想空間内で作成するレイアウト作成部と、レイアウトを画面表示する表示部と、表示部に表示された各機器に関する情報を設定する情報設定部と、3次元モデルのレイアウト、及び情報設定部に設定された情報に基づいてロボットのパレタイジングプログラムを生成するプログラム生成部と、を有する。
(もっと読む)
ロボットプログラム作成装置
【課題】教示点を短時間修正しロボットや周辺設備を破損防止するプログラムの作成。
【解決手段】ロボットの教示点の情報とロボットの周囲環境モデルの情報とを格納する記憶部11を有しロボットプログラムをオフラインで作成するプログラミング部10と、ロボットの動作を制御しロボットを実際の教示点に移動させ実際の教示点の情報を捕えロボットプログラム上の教示点の情報を修正するロボット制御部20とを有し、プログラミング部10は、教示点の情報と周囲環境モデルの情報に基づきロボットをワークや障害物に干渉させずに現在位置から修正された教示点に向かって移動させる経路の生成手段12を有し、ロボット制御部20は、生成された経路に基づきロボットを修正された教示点に向かって移動させる手段22を備え、移動後に修正された教示点を再び実際の教示点の情報に置換えることでロボットプログラム上の教示点の情報を修正する。
(もっと読む)
1 - 20 / 30
[ Back to top ]