
Fターム[3C269QC02]の内容
Fターム[3C269QC02]に分類される特許
1 - 20 / 79
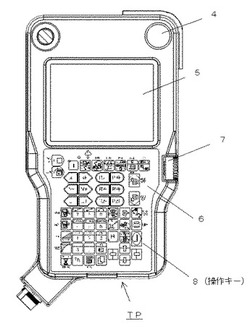
操作装置および可動機械制御システム
【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
(もっと読む)
教示装置及び教示設備

【課題】信号ケーブルと電源ケーブルとを一纏めにして、教示装置と被教示機器とを接続・配線することができる教示装置及びこのような教示装置を使用した教示設備を提供する。
【解決手段】被教示機器4に制御内容を教示する教示装置1において、教示部19と電源部とからなり、上記教示部19には上記被教示機器4に電力を出力する電源出力端子と上記被教示機器4に制御信号を出力する制御信号出力端子とが設けられていて、上記電源出力端子と上記制御信号出力端子は一つに纏められており、上記被教示機器4に電力を供給する電源ケーブルと上記被教示機器に制御信号を出力する信号ケーブルを一つに纏めたものの一端に設けられた一つのコネクタ11aが上記一つに纏められ端子に差し込まれるように構成された教示装置1。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
ティーチング装置およびティーチング方法
【課題】周辺機器との干渉を抑えるために記録される位置データの容量を抑えつつ、作業者に位置データの記録操作を意識させずにティーチングを行うことができるティーチング装置を得ること。
【解決手段】ティーチング装置50は、ロボットに対して動作経路のティーチングを行うティーチング装置であって、ロボットを移動させる際に操作される入力部に対する操作内容を受信する受信部と、ロボットの位置を検出する位置検出部と、入力部に対する操作内容が切替えられたときのロボットの位置データを位置検出部に送信させる制御部と、位置検出部から送信された位置データを記録する記憶部と、を備える。
(もっと読む)
7軸多関節ロボットの制御装置および教示方法
【課題】 教示作業時においてロボット全体の動作軌跡を容易に把握して適切な教示を行うことができる7軸多関節ロボットの制御装置および教示方法を提供する。
【解決手段】 7軸多関節ロボット1の教示を行う教示モードにおいて、所定の平面Pzを設定する設定器21と、肘部Eの動作軌跡が設定器21により設定された平面Pz内に制限されるように7軸多関節ロボット1を動作制御する制御器23と、手先11の位置が教示された場合に、肘部Eの動作の制限を拘束条件として、手先11の位置変化に基づく各回転軸A1〜A7の回転角度を演算する逆変換演算を行う演算器22とを備えている。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
遠隔操作装置及び工作機械
【課題】操作パネルの操作スイッチの状態と工作機械の内部情報を一致させることが可能な遠隔操作装置を提供する。
【解決手段】工作機械1を操作する操作スイッチを有する操作パネル4に着脱可能であって、工作機械1とは遠隔地に配置された別体のパソコン30からの操作指示により操作スイッチを遠隔操作する遠隔操作装置20において、操作パネル4の操作面に装着するパネル装着部21と、操作スイッチを操作する操作部23と、操作部23を操作パネル4に対向して移動する送りユニット22と、操作指示に基づき、操作部23及び送りユニット22を制御する制御部25と、を備え、パネル装着部21に、操作部23、送りユニット22、及び制御部25を設けた。
(もっと読む)
工作機械の制御装置及びこれを備えた加工関連データ処理システム
【課題】工作機械の制御装置にかかる負荷を軽減することができる加工関連データ処理システムなどを提供する。
【解決手段】加工関連データ処理システム1は、工作機械2の制御装置3とデータ処理装置40とが電気通信回線5を介して接続されており、制御装置3は、NC装置11と支援装置20とから構成される。支援装置20は、データ処理装置40に連係処理信号を送信してデータ処理装置40を遠隔操作し、データ処理を行わせるとともに、データ処理装置40で行われたデータ処理結果を受信する連携処理指示部22を備え、データ処理装置40は、プログラム自動生成部44と、加工シミュレーション部45と、制御装置3から連係処理信号を受信して、制御装置3で受け付けられたデータ処理要求に対応し且つワークの加工に関連したデータ処理をプログラム自動生成部44及び加工シミュレーション部45に行わせるとともに、データ処理結果を制御装置3に送信する連係処理実行部42とを備える。
(もっと読む)
ロボット制御システム
【課題】予め定められた座標系でジョグ送りする場合は複数のキーの組合せ操作が必要なため操作が煩雑になる。
【解決手段】ツールの移動方向を定める方向指示キー41Aを備え、指示された移動方向および手動操作座標系に基づき、ツールをジョグ送りするロボット制御システム10である。ジョグ送り操作時に、手動操作座標系を構成する座標軸のうち1つを選択する。次に座標軸の回転角度を設定する。そして、手動操作座標系を座標軸中心に回転させ、回転後の手動操作座標系に従ってツールをジョグ送りする。上記回転角度は、ジョグダイヤル42によって設定しても良い。また、方向指示キー41のいずれか1つを押下したまま、ジョグダイヤル42によってリアルタイムに座標系を回転させながらアナログ感覚でジョグ送りすることもできる。軸方向をいつでも変更可能とすることによりジョグ送り操作時の煩雑さを解消する。
(もっと読む)
数値制御装置
【課題】工作機械においてワークの加工時における移動対象物の通常の移送とは別にその移動対象物の速度変化を伴う動作を実施する場合に、移動対象物が加工指令プログラムによって指示される加工パスからずれるのを防ぎつつ、その速度変化を伴う動作が指示されてからその動作が実行されるまでの応答性を向上する。
【解決手段】数値制御装置2では、演算部12は、特別指令入力装置122に特別指令が入力されたことに応じて、設定単位時間の長さをその特別指令の入力直前の状態における長さからその特別指令が指示する移動対象物の速度変化に応じた長さに変化させ、その変化させた後の設定単位時間当たりの各支持体102b,106a,108a,110aの対応する移動軸方向への移動量を加工パスから算出する。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
NC工作機械
【課題】
機械操作者の操作入力作業を簡略化すべく、機械操作者の使用方法に合わせた画面表示を設定することができるNC工作機械を提供する。
【解決手段】
機械操作者からの入力データを入力する入力データ処理部と、前記機械操作者の使用方法を予め分類し記憶する使用方法分類記憶部と、前記機械操作者の入力データに応じて前記使用方法分類記憶部に記憶された何れの使用方法であるかを判断する分類判断部と、前記使用方法の分類内容に応じて、前記機械操作者に対して操作入力を促す表示画面の表示項目のうち、入力不要項目はマスクするように予め設定された表示切替内容記憶部と、前記分類判断部の判断内容に応じて、前記表示切替内容記憶部から表示すべき表示項目を特定し、前記機械操作者の入力データに応じた表示画面となるように画面切替を行う表示切替部と、を備えた。
(もっと読む)
数値制御装置及び工作機械
【課題】機械構造の異なる各種工作機械における誤差補正システムの共通化を促進しつつ、互いに平行な移動軸を持つ複数の移動装置を含む工作機械でもその平行な移動軸を持つ各移動装置の動作の誤差補正を行えるようにすることである。
【解決手段】数値制御装置16は、数値制御プログラムからその数値制御プログラムが指示する対象物の移動位置である指令位置を読み取る指令位置読取り部26と、指令位置読取り部26によって読み取られた指令位置から機械軸毎の座標を算出する機械軸座標算出部28と、機械軸座標算出部28によって算出された機械軸毎の座標を誤差データ格納部22に格納された機械軸毎の誤差データに基づいて補正することにより機械軸毎の補正座標を算出する補正演算部30と、補正演算部30により算出された機械軸毎の補正座標に従って各駆動装置2c,6b,8b,10bに前記支持体を駆動させる駆動制御部32とを備えている。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
非常停止SWを備えた着脱可能な教示操作装置を有する可動機械制御システムにおいて、非常停止の原因が、非常停止SWの操作によるものか、回路の断線によるものかを容易に確認できない。
【解決手段】
並列回路部Kは、検出器32が教示操作装置50の接続を検出したときに閉成する半導体スイッチ41とコンデンサCの直列回路に対して並列に接続されたメーク接点RY1aを備える。パルス信号生成回路42は並列回路部Kに対して「H」信号、及びパルス信号を印加する。判定回路46は、「H」信号、及びパルス信号(論理信号)が印加された状態で並列回路部Kから出力される信号の論理状態に基づいて、ロボットRの非常停止が、並列回路部Kの断線によるものか、非常停止スイッチ52の操作によるものかを判定する。
(もっと読む)
ロボットの制御装置及びロボットの位置修正制御方法
【課題】ロボット本体の手先の教示点の修正が、アーム全体について意図しない動作を生じさせることを回避できるロボットの制御装置を提供する。
【解決手段】制御装置は、ティーチチェックモードの実行停止時点に実行中であった制御プログラム中の命令を判定し、当該命令が動作命令MOVEであれば当該動作命令を、動作命令MOVEでなければ直近に実行された動作命令MOVEを対象として、その時点の手先位置が動作命令MOVEの目標位置に一致しているか否かを判定する(S8,S9)。手先位置と目標位置とが一致していない場合は(S9:NO)、以降に行われるユーザの修正操作に応じた手先位置の修正制御を行い(S16)、手先位置と目標位置とが一致している場合は(S9:YES)、以降に行われる手先位置の修正制御に制限を付与する制限付き修正制御を行う(S10〜S12)。
(もっと読む)
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
1 - 20 / 79
[ Back to top ]