
Fターム[3C269SA04]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 制御対象を直接動かして教示するもの (162) | 教示用手動操作手段を用いるもの (105)
Fターム[3C269SA04]の下位に属するFターム
制御対象の作業部近傍に設けられた (3)
Fターム[3C269SA04]に分類される特許
1 - 20 / 102
操作装置および可動機械制御システム
【課題】操作装置に配置されたキーの名称を各言語に対応させる場合は、各言語に応じたキーシート等を在庫として用意しておき、出荷国に応じた貼付作業を行う必要があるために、その分の管理コストや製造工数を必要とする。
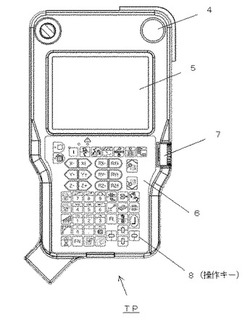
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には操作キーの名称が印字されていない。操作装置TPの本体または接続先のコントローラは、操作キーの名称をガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、操作キーの名称および画像が各言語に応じて表示部5に表示される。本発明により各国に応じた作業が不要になるというメリットがあると同時に、作業者は、これまでと同様に操作キーの名称を容易に知ることができる。
(もっと読む)
操作装置および可動機械制御システム

【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
(もっと読む)
ロボットの位置姿勢補間方法及びロボットの制御装置
【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
ロボットシステム
【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
携帯遠隔操作装置およびロボットシステム
【課題】表示部へ表示された教示データから容易にコマンドを視認することができること。
【解決手段】所定の動作をロボットへ実行させる命令ごとに表示色を設定し、設定された表示色を命令に関連付けて記憶する。また、命令をロボットへ教示するティーチングによって作成された教示データを命令に関連付けられて記憶された表示色に基づいて表示部へ表示する。さらに、表示部へ表示された教示データの表示色を所定の操作によって設定された表示色へ一時的に変更して表示部へ表示するよう携帯遠隔操作装置およびロボットシステムを構成する。
(もっと読む)
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
溶接位置検出方法、及び溶接位置検出装置
【課題】
溶接線の進行方向が大きく変化するワークに対してセンシングを行う場合、進行方向の変化に応じてロボットの姿勢を変更する必要がある。このため、教示に時間を要したり、ロボットがワークや治具等と干渉したりする。
【解決手段】
マニピュレータM1に取付けられた溶接トーチ14に対して開先位置検出センサLSが可動機構62を介して設けられる。溶接線の進行方向が変化する場合は、開先位置検出センサLSの溶接トーチ14に対する相対位置であるセンシング位置を、ロボットの姿勢変更により変更するのではなく、可動機構62により変更するようにしている。教示工数低減、干渉低減を図ることができる。
(もっと読む)
教示装置及び教示設備
【課題】信号ケーブルと電源ケーブルとを一纏めにして、教示装置と被教示機器とを接続・配線することができる教示装置及びこのような教示装置を使用した教示設備を提供する。
【解決手段】被教示機器4に制御内容を教示する教示装置1において、教示部19と電源部とからなり、上記教示部19には上記被教示機器4に電力を出力する電源出力端子と上記被教示機器4に制御信号を出力する制御信号出力端子とが設けられていて、上記電源出力端子と上記制御信号出力端子は一つに纏められており、上記被教示機器4に電力を供給する電源ケーブルと上記被教示機器に制御信号を出力する信号ケーブルを一つに纏めたものの一端に設けられた一つのコネクタ11aが上記一つに纏められ端子に差し込まれるように構成された教示装置1。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】ロボットアームの先端のフランジに発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、手先が正しく移動目標位置に移動したときの発光ダイオードの位置と実際の移動位置とを基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ロボットの教示システムおよび教示方法
【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
産業用ロボット
【課題】アラーム発生時にどのデータを記録するかは予め設定されており、運転稼動中に運転を停止させることなく、どのデータを記録するのか設定することができない。
【解決手段】ロボットと、前記ロボットを制御するロボット制御装置と、前記ロボットを操作するティーチペンダントとを備えた産業用ロボットであって、前記ロボット制御装置および/または前記ティーチペンダントは記録メディアスロットを有し、前記記録メディアスロットに接続された記録メディア内に記憶されており前記産業用ロボットの動作中に記憶する情報を定義した記録方法ファイルを前記記録メディアの接続時に自動的に読み出し、前記記録方法ファイルを構成しており情報を記録するトリガとなる記録トリガの監視や記録した情報の書き出しを含む処理を行う解析用機能の実行を自動的に開始する。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム
【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ティーチング装置およびティーチング方法
【課題】周辺機器との干渉を抑えるために記録される位置データの容量を抑えつつ、作業者に位置データの記録操作を意識させずにティーチングを行うことができるティーチング装置を得ること。
【解決手段】ティーチング装置50は、ロボットに対して動作経路のティーチングを行うティーチング装置であって、ロボットを移動させる際に操作される入力部に対する操作内容を受信する受信部と、ロボットの位置を検出する位置検出部と、入力部に対する操作内容が切替えられたときのロボットの位置データを位置検出部に送信させる制御部と、位置検出部から送信された位置データを記録する記憶部と、を備える。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御装置
【課題】円弧状部分から直線部分に入る位置を正しくティーチングできず、直線部分に入った位置をティーチングしてしまっても、ツール先端に円弧状部分により近い形状の軌跡を辿らせる。
【解決手段】4つのティーチング位置P1〜P4のうち、P1からP2の間、P3からP4の間は直線補完する。P2が作業対象部分の直線部分から円弧状部分に入った位置に正しくティーチングし、P3は円弧状部分から直線部分に入った位置をティーチングした場合、P2とP3との間は楕円で曲線補間する。この場合、P2には楕円の長径部分が接するので円に近く、P3には短径部分が接するので直線に近くなり、結果として作業対象部分の形状に近くなる。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
7軸多関節ロボットの制御装置および教示方法
【課題】 教示作業時においてロボット全体の動作軌跡を容易に把握して適切な教示を行うことができる7軸多関節ロボットの制御装置および教示方法を提供する。
【解決手段】 7軸多関節ロボット1の教示を行う教示モードにおいて、所定の平面Pzを設定する設定器21と、肘部Eの動作軌跡が設定器21により設定された平面Pz内に制限されるように7軸多関節ロボット1を動作制御する制御器23と、手先11の位置が教示された場合に、肘部Eの動作の制限を拘束条件として、手先11の位置変化に基づく各回転軸A1〜A7の回転角度を演算する逆変換演算を行う演算器22とを備えている。
(もっと読む)
ロボットの制御装置及びロボットの姿勢補間方法
【課題】ロボットの手先がワークを把持して加工を行う場合の作業精度を向上させる。
【解決手段】制御装置は、手先の先端点を座標原点とするX方向,Y方向,Z方向の各軸について、手先の位置及び姿勢をティーチングする場合に、座標原点から各軸方向の所定距離に手先の姿勢を定める姿勢点を設定すると、ティーチングした姿勢に対応する姿勢点の間について、各軸の姿勢点の移動軌跡がそれぞれ滑らかに繋がるように補間する。
(もっと読む)
1 - 20 / 102
[ Back to top ]