
Fターム[3D012BB00]の内容
自動自転車、自転車のフレーム (1,379) | 他に分類されない自転車 (500)
Fターム[3D012BB00]の下位に属するFターム
Fターム[3D012BB00]に分類される特許
1 - 20 / 337
倒立移動体及び角速度センサの出力値補正方法
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
倒立型移動体、その制御方法及びプログラム

【課題】急減速を行った場合でも限られた駆動力でその安全性を維持すること。
【解決手段】倒立型移動体は、倒立状態を維持しつつ、搭乗者が搭乗する搭乗部の傾斜に応じて所望の走行を行う。また、倒立型移動体は、搭乗部が後傾斜して減速する傾斜状態を水平な倒立安定状態に戻すための駆動トルクを算出するトルク算出手段と、搭乗部が後傾斜して減速する傾斜状態にあり、かつトルク算出手段により算出された駆動トルクが所定トルク以上である不安定状態にあるか否かを判定する判定手段と、判定手段により不安定状態と判定されたとき、車輪を停止する制御を行う制御手段と、を備えている。
(もっと読む)
同軸二輪車
【課題】制御装置に入力される振動等だけでなく、サポート部に入力される振動等を減衰することができる同軸二輪車を提供する。
【解決手段】本発明の一形態に係る同軸二輪車1は、車輪20(20L、20R)を支持する車体10と、車体10に連結され、サポート部50及び制御装置80を支持する本体部40と、を備え、車輪20(20L、20R)の駆動を制御することで倒立制御を行う同軸二輪車であって、車体10と本体部40との連結部に弾性体2が介在されている。
(もっと読む)
移動体制御装置、その制御方法及びプログラム
【課題】倒立型移動体の安全性を向上させる。
【解決手段】移動体制御装置110は、倒立型移動体の状態量を検出する状態検出手段123と、検出した状態量と駆動車輪410に生じる外乱トルク推定値と搭乗者の走行操作に応じ駆動車輪まわりに生じる操作トルク推定値と駆動車輪の駆動トルクとに基づき倒立型移動体の状態量及び搭乗者の姿勢角度のうち少なくとも1つを算出する状態推定手段131と、算出した状態量及び搭乗者の姿勢角度のうち少なくとも1つと駆動車輪の駆動トルクとに基づき外乱トルク推定値を算出する外乱トルク推定手段132と、算出した状態量及び搭乗者の姿勢角度のうち少なくとも1つに基づき操作トルク推定値を算出する操作トルク推定手段133と、外乱トルク推定値と操作トルク推定値と駆動車輪の駆動トルクとに基づき駆動車輪の外乱トルク及び操作トルクの組合せが不安定状態であるか否かを判定する状態判定手段と、を備える。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
倒立二輪型車両、その動作方法、及びプログラム
【課題】倒立二輪型車両の動作特性を踏まえて、倒立二輪型車両のより快適な乗車を提供することが望まれている。
【解決手段】倒立二輪型車両100は、ピッチ方向(z軸に沿う方向)におけるハンドル部45のピッチ角速度の増加に応じて制限値が低減される条件にて、倒立二輪型車両100の移動速度が制限値以上であるか否かを判定し、当該判定結果に応じて、倒立二輪型車両100の搭乗者に対してハンドル部45の急操作の是正を促すべく報知動作する。例えば、倒立二輪型車両100は、警告音を発生する。
(もっと読む)
移動体の制御方法及びプログラム
【課題】消費電力を低減することができる、移動体の制御方法を提供する。
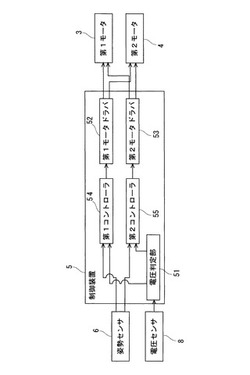
【解決手段】本発明の一形態に係る移動体の制御方法は、多重系モータ33L、33Rの一つの系を制御する第1の制御系31又は32と、多重系モータ33L、33Rの他の一つの系を制御する第2の制御系32又は31とを備える倒立制御型の移動体の制御方法であって、移動体の状態に基づいて、移動体の倒立制御が可能で、且つ復帰時に必要な機能を残して、一方の制御系の機能をスリープ状態とする。
(もっと読む)
移動体
【課題】車両の操作感覚の犠牲を抑制しつつ、カント路上における移動体の走行状態を好適に確保すること。
【解決手段】倒立二輪型車両100は、一組の車輪(11、12)を回転制御して移動する移動体である。倒立二輪型車両100は、搭乗者によって操作されるハンドル部45と、搭乗者による操作に応じて姿勢変化したハンドル部45を初期姿勢へ復帰させるバネ56と、搭乗者による操作に応じて初期姿勢とは異なる第1姿勢へ変化したハンドル部45を、第1姿勢から初期姿勢までハンドル部45の姿勢が変化する過程の姿勢である中間姿勢まで、バネ56と共にハンドル部45を復帰させるバネ58と、を備える。更に、倒立二輪型車両100は、ハンドル部45が逆方向へ傾くことに対応するべく、バネ66、バネ68を有する。
(もっと読む)
倒立振子型一輪車
【課題】訓練、慣れを要することなく簡単な操作によって乗員の思い通りに旋回する倒立振子型一輪車を提供する。
【解決手段】倒立振子型一輪車の搭乗者フレーム12に設けられた左右の足載せペダル26を操作することにより、車輪支持フレーム34ならびに車輪ユニット42を搭乗者フレーム12に対して前後方向軸線X周りに傾動させ、傾動方向にステア作用を生じさせる事で、旋回したい方向への体重移動を要することなく倒立振子型一輪車を旋回させる構成とする。
(もっと読む)
全方向移動車両
【課題】全方向への移動走行と自転運動の組合せで構成される多種類の運動を、荷重センサの出力に基づき操作できる全方向移動車両を提供する。
【解決手段】荷重センサ5a、5b、5c、5dの方向と出力値により決まるベクトルを指令値として送出する操作手段と、全方向移動車両1の運動を設定する運動設定手段71と、運動設定手段71により設定された運動をさせるべくオムニローラ2a、2b、2c,2dに動作指令を出力する車輪駆動制御手段72とを備える。運動設定手段71が、指令値の総計である総計指令値により運動方向と運動速度の少なくも1方を設定し、複数の所定の指令値の合計である所定合計指令値を用いて運動の種類を設定する。
(もっと読む)
タイヤアセンブリ
【課題】タイヤが全体的に振動しにくく、部品点数が少なく、組付工数が少ないタイヤアセンブリを提供する。
【解決手段】タイヤアセンブリ1は、ホイール2と、ホイール2の径方向外側に配置され、路面に接地するタイヤ3と、ホイール2とタイヤ3との間に介装され、ホイール2に周方向に離間して接続される一対の接続部、一対の接続部同士を連結しタイヤ3に当接する連結部、を有する複数のばね部40が周方向および車幅方向に並べられて成るサスペンション部4と、を備える。
(もっと読む)
全方向移動ロボット
【課題】駆動力を効率的に球状車輪に伝達することができる全方向移動ロボットを提供する。
【解決手段】1又は2以上の球状車輪2と、前記球状車輪2の中心で交差するピッチ軸、ロール軸、及びヨー軸周りに回転自在に前記球状車輪2を支持し、直列に連結されたピッチリンク10、ロールリンク11、及びヨーリンク12と、前記各リンクを回転駆動させるアクチュエータ5と、前記アクチュエータ5を動作制御する制御部6と、前記ヨーリンク12に固定された搭乗部4と、前記搭乗部4の姿勢を検出する変化量検出センサ7とを備えることを特徴とする。
(もっと読む)
移動体
【課題】使用者が主体的に警報を発生させることができる移動体を提供する。
【解決手段】本発明の一形態に係る移動体1は、使用者が腿部で旋回操作部40を左右方向に傾動させることにより旋回を実現する移動体であって、警報発生部61と、旋回操作部40に設けられ、使用者の腿部で操作される警報操作部62と、警報操作部62の操作信号に基づいて、警報発生部61を制御する制御部と、を備える。これにより、使用者が主体的に警報を発生させることができる
(もっと読む)
ピッチ変調による車両制御
【課題】下地表面上の特定方向への運動に対する車両の前後安定化の方法を提供すること。
【解決手段】車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は各々の後輪を駆動し、コントローラは一律の制御規則に従い該前輪が該下地表面と接触していてもなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していてもなくても、ユーザーの操縦により支配される通りにターンを続ける。
(もっと読む)
二輪車
【課題】車輪を前後に直列に配置する第1の姿勢と、車輪を左右に平行に配置する第2の姿勢とに容易に変更でき、実用性の高い二輪車を提供する。
【解決手段】二輪車の車体フレーム1を、車輪2A,2Bを支持する一対の縦フレーム11,12と、両縦フレーム11,12の上端間を架け渡す横フレーム10とで略逆U字状に構成し、各縦フレーム11,12をそれぞれ、これらの縦軸まわりの周方向に回動することで、車輪2A,2Bを前後に直列に配置する第1の姿勢と、左右に平行に配置する第2の姿勢とに変更するようになし、第1の姿勢ではペダル駆動手段6により走行し、かつ電動駆動手段5A,5Bにより走行をアシストする一方、第2の姿勢においては、倒立振り子制御による電動駆動手段5A,5Bにより走行するようになした。
(もっと読む)
倒立二輪車
【課題】複数の状態センサ間の個体差による検知データのバラツキによって発生する無駄な消費電力を抑える。
【解決手段】相互に電気的に絶縁された第1巻線22及び第2巻線23を有し、駆動輪を回転させるための第1モータ4と、第1駆動系6と、第2駆動系7と、を備える。第1駆動系6は、第1状態センサ12と、第1制御回路11を有する。第2駆動系7は、第2状態センサ17と、第2制御回路16を有する。第1駆動系6の第1状態センサ12の第1検知データと、第2駆動系7の第2状態センサ17の第2検知データは、第1駆動系6と第2駆動系7の間で共有される。第1駆動系6の第1制御回路11は、共有している検知データに基づいて第1モータ4の第1巻線22への電力供給を制御する。第2駆動系7の第2制御回路16は、共有している検知データに基づいて第1モータ4の第2巻線23への電力供給を制御する。
(もっと読む)
倒立二輪車
【課題】モータの負荷が高い場合であっても、安定した動作を行うことができる。
【解決手段】倒立二輪車は、駆動手段にかかる負荷を取得する負荷情報取得手段と、倒立二輪車の姿勢角の情報を取得する姿勢情報取得手段と、駆動手段にかかる負荷と、姿勢情報取得手段により取得された姿勢角と、に基づいて、倒立二輪車が倒立状態を維持できる限界姿勢角と、姿勢角が限界姿勢角に達する前に警告を行うための警告姿勢角と、を求める演算部と、駆動手段を駆動制御する制御部と、を備える。制御部は、現在の姿勢角が警告姿勢角以上に傾動した場合には、ユーザに警告を発する制御を行い、現在の姿勢角が前記限界姿勢角以上に傾動した場合には、ユーザに警告するとともに前記駆動手段の出力を下げる制御を行う。
(もっと読む)
1 - 20 / 337
[ Back to top ]