
Fターム[3D012BB01]の内容
自動自転車、自転車のフレーム (1,379) | 他に分類されない自転車 (500) | 遊戯用 (129)
Fターム[3D012BB01]の下位に属するFターム
スケートボード型 (31)
Fターム[3D012BB01]に分類される特許
1 - 20 / 98
移動可能な器具
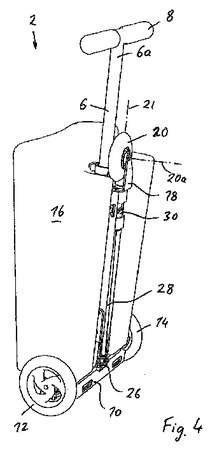
移動可能な器具は、平坦要素(4)と、第1回転軸(12a)の周りに回転するように軸支された少なくとも1つの第1輪(12)と、上記平坦要素(4)に近い近位端(6b)および握み(8)をもつ遠位端(6a)を有する握り支柱(6)と、上記第1輪(12)の近傍に在って,動作状態において平坦要素(4)に対して好ましくは略直角に整列させて,握り支柱(6)の遠位端が平坦要素(4)から最も離れ、休止状態において握り支柱(6)の遠位端(6a)が平坦要素(4)に最も近づくように,握り支柱(6)が第1旋回軸(23)の周りに旋回できるように上記握り支柱(6)の近位端(6b)を上記平坦要素(4)に連結する旋回継手と、上記平坦要素(4)の第1輪および旋回継手の配置から離れた遠位端に第2回転軸(20a)の周りに回転するように軸支された少なくとも1つの第2輪(20)を備える。上記器具の特徴は、上記第2輪(20)が、略移動方向(A)に延びる第2旋回軸(21)の周りにも旋回できるように平坦要素(4)に配置され、かつ、メカニズム(28,30)を介して握り支柱(6)に連結され、このメカニズムは、平坦要素(4)に対する握り支柱(6)の第1旋回軸(23)周りの旋回運動を、第2輪(20)の第2回転軸(20a)の平坦要素(4)に対する角度が、休止状態において動作状態におけるよりも大きくなるように、第2輪(20)の第2旋回軸(21)周りの旋回運動に変換する。 (もっと読む)
無人一輪車。

【課題】 一輪車を無人で転倒させることなく走行させる。
【解決手段】 フレームに車輪を懸架して無人で走行する無人一輪車において、フレームに車輪を駆動する走行用モータを取り付けるとともに、フレームから左腕と右腕を張出させ、フレームにこれら左腕と右腕をそれぞれ水平軸回りの回動と鉛直軸回りの回動をさせる上下用モータと旋回用モータを取り付け、フレームの重心変移で発生する前後方向及び左右方向の転倒モーメントに基づくフレームの転倒を、走行用モータによる車輪の前後移動に基づく前後方向引戻しモーメントと、上下用モータによる左腕又は/及び右腕の水平軸回りの回動に基づく左右方向引戻しモーメントと、旋回用モータによる左腕又は/及び右腕の鉛直軸回りの回動に基づく左右方向引戻しモーメント及び回行時の遠心力に基づく旋回モーメントとを発生させて防ぐ。
(もっと読む)
椅子付3輪キャンバリング車
【課題】椅子に座った下肢障害者が自らの左右体重移動のみで安全にしかも確実に前進走行させて楽しめる椅子付3輪キャンバリング車を提供する。
【解決手段】舵取り軸21にハンドル20と単一前輪22aを設け,舵取り軸21の下部左右には後方に伸びた一対のトレーリングアーム2の前方を取り付け,両トレーリングアーム2の後部にはそれぞれ一対の後輪22bを設置した椅子付3輪キャンバリング車において、両トレーリングアーム2の後部にはトレーリングアーム2に固定した一対の側脚3と座部4からなる左右揺動とその復元可能な椅子を搭載することで、座部4に座った人が自らハンドル20を握り、座部4に左右に体重移動させて椅子と両脚部と後輪とトレーリングアームを同時に左右に揺動させることを繰り返すことにより車全体を前進させる椅子付3輪キャンバリング車である。
(もっと読む)
倒立型移動体の制御装置
【課題】倒立型の移動体が振動的になることなく安定に所望の速度で走行できるようにする。
【解決手段】負荷角度θ1が負荷角度指令θ1*の近傍である場合、減衰のみを移動体本体141に加えるように制御する。すなわち、制御装置130は、場合分け線形トルク演算器105と、制御切替器106と、を備える。場合分け線形トルク演算器105は、負荷速度と減衰パラメータとの乗算値に負号を付した減衰トルクと、位置偏差、速度偏差および加速度偏差の一つ以上に所定ゲインを乗算して得る線形フィードバックトルクと、を算出する。制御切替器106は、前記減衰トルクと前記線形フィードバックトルクとを切り替えて出力する。制御切替器106は、負荷角度θ1が負荷角度指令θ1*の近傍である場合、減衰トルクを出力し、それ以外の場合には前記線形フィードバックトルクを出力する。
(もっと読む)
走行装置及びその制御方法
【課題】走行装置及びその制御方法において、倒立制御を安定的に行うこと。
【解決手段】走行装置1は、搭乗者の乗車を検出する乗車検出手段と、車輪31、32の駆動を制御して倒立制御を行う制御手段233と、搭乗者が乗車している状態での倒立制御を行う乗車制御モードと、搭乗者が乗車していない状態での倒立制御を行う空車制御モードと、を選択するためのモード選択手段41aと、乗車検出手段による検出結果と、モード選択手段41aによる選択結果と、が一致するか否かを判定する判定手段232と、を備えている。制御手段233は、判定手段232による判定結果に基づいて、倒立制御を行う。
(もっと読む)
同軸二輪車
【課題】速度の提示を適切に行うことにより、走行の安全性を向上させる同軸二輪車を提供する。
【解決手段】同軸二輪車は、一対の車輪をそれぞれ駆動する一対の車輪駆動ユニットと、車輪駆動ユニットに走行指令を与える走行制御部と、同軸二輪車の移動速度を算出する移動速度算出手段と、移動速度算出手段にて求められた移動速度を搭乗者に提示するための速度提示音を表す信号を生成する速度提示信号生成部と、速度提示音を発音するスピーカと、を備える。スピーカは、地面または前方に向けて発音するように設けられている。速度提示音は、移動速度に応じて音高、音量、音の継続時間を変化させる。
(もっと読む)
同軸二輪車
【課題】速度の提示を適切に行うことにより、走行の安全性を向上させる同軸二輪車を提供することにある。
【解決手段】同軸二輪車10は、一対の車輪2L、2Rをそれぞれ駆動する一対の車輪駆動ユニット3L、3Rと、車輪駆動ユニット3L、3Rに走行指令を与える走行制御部と、同軸二輪車10の移動速度を算出する移動速度算出手段と、移動速度算出手段にて求められた移動速度を発光色および発光パターンによって周囲に提示するための速度提示信号を生成する速度提示信号生成部と、速度提示信号によって指令された発光色および発光パターンで発光する発光装置46と、を備える。発光装置46は、ハンドル部45に設けられ、前方および上方に向けて発光する。
(もっと読む)
体重移動バランス自動車
【課題】体重移動を利用してバランスをとりながら運転し走行する高齢者向き身障者向きの自動車を提供することを目的としている。
【解決手段】ヘルメットなどの体重移動検知体1の設けられた全方向加減速操縦桿2の下端を可動自在に保持する水平回転盤付トロコイド推進後輪制御機構3がジャイロ安定車体10に設けられるとともに、原動体4とエネルギー供給体5により駆動されうるようになされ、ジャイロ安定車体10の旋回を阻止する旋回防止前輪6が固定して設けられ、ジャイロ安定車体の前部に肩幅間隔に並設されブレーキ7付きの2本の身体保持ステッキ8が設けられてなる構成
(もっと読む)
移動体
【課題】高い操作性を有する移動体を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる全方位車輪6と、車輪6を駆動する駆動モータと、搭乗席の搭乗面に加わる力に応じた計測信号を出力する力センサ9と、車台13に対して搭乗席8をヨー軸周りに回転可能に支持する支持台14と、支持台14のヨー軸周りの回転角を検出するために設けられたエンコーダ14aと、力センサ及びエンコーダ14aからの出力に応じて、車輪6を回転させるための指令値を駆動モータ603に出力する制御計算部51を備えるものである。
(もっと読む)
車輪角度変更機構
【課題】 必要とするスペースが小さく、簡単な構造で、トルクを略前後均等に伝えることが可能な車輪角度変更機構を提供する。
【解決手段】 左右一対の車輪部7の角度を変更する車輪角度変更機構1において、左右一対の車輪部7の上方を連結する上リンク部材5と、左右一対の車輪部7の下方を連結する下リンク部材6と、下リンク部材6に支持されるスライドアクチュエータ本体41と、スライドアクチュエータ本体41と、上リンク部材5と、に連結されるスライダ45と、を備えたことを特徴とする。
(もっと読む)
車体構造及び同軸二輪車
【課題】搭乗者の積極的な荷重配分で同軸二輪車と一体となって操作を楽しむ娯楽性能を備えた車体構造を提供する。
【解決手段】車体10は、同一軸心線上に配置された2個の車輪20を備える同軸二輪車1を成す車体である。車体10は、横リンク111、112と、縦リンク113とを有しており、同軸二輪車1の左右方向へ回転可能な平行リンク機構110と、縦リンク113の上端部に設けられたステッププレート120と、を備えている。左右のステッププレート120に乗せられた搭乗者の荷重は、同軸二輪車1の旋回時に、縦リンク113に設けられた車輪20の接地点Aを通り、且つ縦リンク113と平行な線Nより内方側又は外方側へずれた位置から平行リンク機構110に作用する。
(もっと読む)
走行装置、走行装置の制御方法
【課題】制御パラメータの調整を迅速かつ容易に行うことができ、さらには、ロバスト性の高い制御系を容易に実現可能な走行装置及びその制御方法を提供すること。
【解決手段】本発明に係る走行装置は、本体の姿勢情報を検出する姿勢検出手段と、車両の速度を検出する車両速度検出手段と、を備え、車両を加速又は減速させる場合に、擬似姿勢指令生成手段17は、検出した姿勢情報と、検出した車両速度と、入力する姿勢情報指令と、入力する車両速度指令とに基づいて、本体の擬似姿勢情報指令を生成し、姿勢制御手段18は、姿勢検出手段で検出した姿勢情報が、擬似姿勢指令生成手段17で生成した本体の擬似姿勢情報指令に追従するように姿勢制御を行うものである。
(もっと読む)
二輪自動車
【課題】 加減速時の応答性を向上させることができる二輪自動車を提供する。
【解決手段】 二輪自動車1は、車体2と、この車体2の左右両側に同軸上に配置された車輪3A,3B(車輪3Bは不図示)とを備え、車両重心Gが車輪3A,3Bの中心Sよりも下方に位置している。車体2には、車輪3A,3Bをそれぞれ回転駆動させる2つの駆動モータと、通常時には路面Rに接地されない前補助輪8及び後補助輪10と、この前補助輪8及び後補助輪10を上下方向に移動させる補助輪接地モータ11,12とが設けられている。また、二輪自動車1は、アクセル開度センサの検出値に基づいて、急加速時には後補助輪10を下方に移動させて路面Rに接地させるように補助輪接地モータ12を制御し、急減速時には前補助輪8を下方に移動させて路面Rに接地させるように補助輪接地モータ11を制御するECUを有している。
(もっと読む)
車輪角度変更機構
【課題】 必要とするスペースが小さく、簡単な構造で、左右輪の角度をそれぞれ別々に傾斜させることが可能な車輪角度変更機構を提供する。
【解決手段】 車体2に支持され、回転駆動力を発生するモータ4と、モータ4の出力軸4bと一体に回転するサンギヤ51と、サンギヤ51の周囲に複数配置され、サンギヤ51と噛み合うプラネタリギヤ52と、円環状の部材からなり、複数のプラネタリギヤ52を囲むように配置され、プラネタリギヤ52と噛み合うアウタギヤ54と、プラネタリギヤ52を回転可能に支持する第1シャフト53と、モータ4の出力軸4bに対して回転可能に支持され、第1シャフト53を有するキャリア55と、キャリア55又はアウタギヤ54の一方を車輪部7と一体に連結し、他方を車体2に対して支持する連結手段9と、を備えたことを特徴とする。
(もっと読む)
車両
【課題】段差抵抗トルクの推定値の履歴に基づいて、段差計測センサによる段差の計測値を補正し、また、その異常状態も検出することによって、段差計測センサをより有効に利用することを可能にし、段差のある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、車体に回転可能に取り付けられた駆動輪と、路面の段差を計測する段差計測センサと、駆動輪に付与する駆動トルクを制御して駆動輪と車体の姿勢を制御する車両制御装置とを有し、車両制御装置は、段差を昇降するときに、段差による抵抗である段差抵抗トルクを推定する段差抵抗トルク推定手段を備え、段差抵抗トルクの推定値に基づいて段差計測センサによる段差の計測値を較正する。
(もっと読む)
車両
【課題】上り段差に到達する直前に、能動重量部を段差の上段側に移動させるとともに、車体を段差の下段側に傾けることによって、高速で段差に進入した場合でも常に安定した車両動作を維持することができ、段差がある場所でも快適かつ安全に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、前後方向に移動可能に前記車体に取り付けられた能動重量部と、前記駆動輪12に付与する駆動トルクを制御するとともに、前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の上り段差に乗り上げる時の前記能動重量部の最大移動量を予測し、前記段差に接触する前に前記能動重量部を前記最大移動量だけ前記段差の上段側に移動させるとともに、前記能動重量部の移動量に応じて前記車体を前記段差の下段側に傾ける。
(もっと読む)
車両
【課題】段差昇降時における車両加速度の限界値を適切に評価し、その限界値で車両加速度の目標値を制限することによって、高い段差に進入した場合であっても常に安定した車両動作を維持することができ、高い段差のある場所でも、安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の段差を昇降するときに、車両加速度の目標値を制限する。
(もっと読む)
車両
【課題】上り段差に到達する直前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させることによって、高速で上り段差に進入した場合でも常に安定した車両動作を維持し、段差がある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の上り段差に接触する前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させる。
(もっと読む)
車両制御装置
【課題】乗員の重量及びエネルギ残量を検出し、検出された乗員の重量及びエネルギ残量に応じて車両の起動制御を行うことによって、適切に駆動源の起動を制御することができ、安定した走行状態を実現することができる安全性の高い制御を行うようにする。
【解決手段】乗員が搭乗する搭乗部13を備える車体と、回転可能に該車体に取り付けられ、駆動源によって駆動される駆動輪と、前記駆動源にエネルギを供給するエネルギ源とを備える車両を制御する車両制御装置であって、前記乗員の重量を検出する乗員重量検出手段と、前記エネルギ源のエネルギ残量を検出するエネルギ残量検出手段と、検出された前記乗員の重量及び前記エネルギ残量に応じて前記車両の起動制御を行う制御手段とを有する。
(もっと読む)
車両
【課題】段差の昇降途中では、走行指令に係わらず、車両加速度の目標値を固定することによって、段差の昇降途中で折り返し動作を行うことがなく、段差に乗り上げるときにも、段差を降りるときにも走行状態や車体の姿勢を安定に保つことができ、段差のある場所でも安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、走行指令を入力する入力装置30と、該入力装置30から入力された走行指令に基づき、前記駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の段差の昇降途中では、前記走行指令に係わらず車両加速度の目標値を固定する。
(もっと読む)
1 - 20 / 98
[ Back to top ]