
Fターム[3D034BC05]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構 (1,407) | 特殊操舵機構 (57)
Fターム[3D034BC05]の下位に属するFターム
回転ブラケット方式 (13)
センターピン操向機構 (4)
Fターム[3D034BC05]に分類される特許
1 - 20 / 40
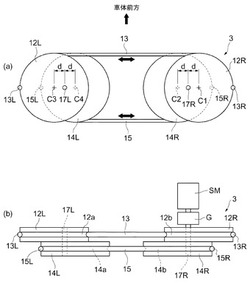
ステアリング装置
【課題】油圧アクチュエータを電動アクチュエータに置き換えることで電動化が図られたステアリング装置を提供する。
【解決手段】ステアリング装置は、転舵軸を中心として旋回自在に設けられた左ナックルアーム、右ナックルアームと、左ナックルアームおよび右ナックルアームのそれぞれに対応させて回転自在に設けられて、回転に応じて左ナックルアームおよび右ナックルアームを旋回させる左上円盤12L、右上円盤12R、左下円盤14L、右下円盤14Rと、円盤同士を繋いで設けられて、円盤同士を同一方向に回転させる上側駆動力伝達ベルト13、下側駆動力伝達ベルト15と、転舵モータSMとを有し、円盤および駆動力伝達ベルトは、転舵角が大きくなるに従って左ナックルアームと右ナックルアームとの間の旋回角度差が大きくなるように旋回させて、旋回外側の走行輪よりも旋回内側の走行輪を大きな転舵角で転舵させる。
(もっと読む)
操舵装置

【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
車両操舵装置
【課題】操舵輪の転舵角を大角度とすることができる技術を提供する。
【解決手段】車両操舵装置1は、車両の操舵輪とステアリングシャフト14とに連結され、操舵輪をキングピン軸X周りに回動させて操舵輪を転舵させるための第1転舵部20と、操舵輪とステアリングシャフト14とに連結され、操舵輪をステアリングシャフト14の回動軸周りに回動させて第1転舵部20と共同して操舵輪を転舵させるための第2転舵部30とを備える。
(もっと読む)
車両操舵装置
【課題】操舵輪に入力される横力に対する剛性を向上させるとともに、操舵輪の転舵角を大角度とすることができる技術を提供する。
【解決手段】車両の操舵輪Wを転舵するための車両操舵装置1は、一端側が操舵輪Wの回転軸70に連結され、他端側が操舵輪Wの上方で操舵輪Wの転舵軸周りに回動するよう車体BD側に連結される操舵輪支持部材10と、操舵輪支持部材10の一端側に回動可能に連結され、車幅方向に延在する第1部材(例えばロッド22)、および車体BD側と第1部材のそれぞれに回動可能に連結される第2部材(例えばピットマンアーム24)を有する連結部20とを備える。車両操舵装置1では、操舵輪Wが転舵される際、操舵輪支持部材10および第2部材が回動し、第1部材が、転舵による操舵輪Wの接近に対して退避する方向に変位する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
(もっと読む)
ステアリング装置
【課題】 追加のモータを一つ備えることで、大舵角調整機能とフェールセーフ機能を同時に付加できて、追加のモータの効率的な使用が行えるステアリング装置を提供する。
【解決手段】 車台1に回転自在に支持されるサスペンションホルダ2に、このサスペンションホルダ2に対して車輪6の転舵を行わせるホルダ上転舵用支持機構5を設ける。サスペンションホルダ2と共に車輪6を転舵する第1の転舵機構7を設ける。サスペンションホルダ2に対して車輪6を転舵する第2の転舵機構8を設ける。これら各転舵機構7,8に転舵用のモータ9,10を設ける。各車輪6にインホイールモータ20を設ける。
(もっと読む)
大型搬送車両の走行装置
【課題】簡易な構成でタイヤの操舵角を大きくした大型搬送車両の走行装置を提供すること。
【解決手段】走行モータ26やアクスル25を介して回転可能なタイヤ21を備える走行機構と、アクチュエータ24を使用して走行機構を車体に対して上下動させる昇降機構と、走行機構と昇降機構とを回転可能に支持する回転ブラケット22を回転させる操舵機構とを有するものであって、操舵機構は、回転ブラケット22に外輪311側が固定され、車体側に内輪312側が固定されたベアリング31を有し、ベアリング31の外輪311に対してウォームギヤ32を介して操舵モータの回転を伝達するようにした大型搬送車両の走行装置12。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
ステアリング装置
【課題】大舵角転舵を可能にしつつ、歯車軸方向に小型化することが可能なステアリング装置を提供する。
【解決手段】入力歯車8と噛合する第一非円形歯車10は、入力歯車8と噛合し、且つピッチ曲線の輪郭が第一非円形歯車10の回転軸RBを中心としたピッチ円の一部からなる第一円形部14と、入力歯車8と噛合せず、且つピッチ曲線の輪郭が第一非円形歯車10の回転軸RBを中心としたピッチ円の輪郭と異なる第一非円形部16を有し、第一非円形歯車10と噛合し、且つ右前輪WFRと転舵可能に接続する第二非円形歯車12は、第一円形部14と噛合可能な第二円形部20と、第一非円形部16と噛合可能な第二非円形部22を有し、第一非円形歯車10と第二非円形歯車12を、第一円形部14と第一非円形部16の第一境界24と、第二円形部20と第二非円形部22の第二境界26が噛合可能な状態で噛合させる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵モータ失陥時にも転舵可能なフェールセーフ機能を有し、かつトー角の調整が可能なステアバイワイヤ式操舵装置を提供する。
【解決手段】 操舵軸10と機械的に連結されないステアリングホイール1と、その操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを与える操舵反力モータ4と、2つの転舵モータ6A,6Bと操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6Aの出力を操舵軸10に伝達する出力伝達機構15と、他の転舵モータ6Bの出力を操舵軸10に伝達する出力伝達機構16とを設け、転舵を行う。両転舵モータ6A,6Bの出力軸を滑りねじ機構24を介して結合する。両転舵操モータの一方が失陥したとき、他方の出力を滑りねじ機構24を介して失陥した転舵モータに対応する出力伝達機構15(16)に伝達する。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 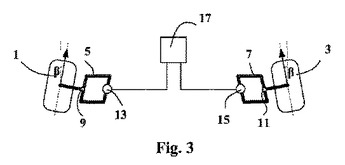 (もっと読む)
(もっと読む)
車両用ステアリング装置
【課題】 ホイールと車体との干渉を抑制しつつ操舵角の増大を実現できる車両用ステアリング装置を提供する。
【解決手段】 アッパステアリングギヤ12uは、アッパフレーム2の上面に前後動自在に保持された第1スライダ21および第2スライダ22と、第1スライダ21を前後に駆動する第1スライドアクチュエータ23と、第2スライダ22を前後に駆動する第2スライドアクチュエータ24と、第1スライダ21の後端に設置されたスイングアクチュエータ25と、第1スライダ21の後端とスイングアクチュエータ25とナックル11の上面後部とに連結された第1ステアリングアーム26と、第2スライダ22の前端とナックル11の上面前部とに連結された第2ステアリングアーム27とを主要構成要素としている。
(もっと読む)
電気自動車の制御装置
【課題】 失陥していない電動モータにより車両の走行を継続できる電気自動車の制御装置を提供する。
【解決手段】 目標駆動力生成部16は、モータの一方が失陥した場合、車両の加速を禁止するフェールセーフ制御を実施し、フェールセーフ制御中に車両が安定走行状態となった場合には、車両の加速を許可するリンプホーム制御へ移行する。
(もっと読む)
全方向移動車輌
【課題】屋外の悪路や段差などを有する場所では強力な走破性を発揮し、屋内などの狭い場所では全方向へ移動可能な走行機能を発揮する、全方向用移動車輌を提供する。
【解決手段】左右の前輪20L,20Rと、左右の後輪30L,30Rと、前輪及び後輪を支持するボディ40と、を備え、前輪及び後輪をそれぞれ車輪外周に沿って並んで配置した複数個の回転体を有し、各回転体をそれぞれ車輪の回転軸と直交する軸まわりに回転可能に支持した全方向用移動車輌であって、ボディ40の四つのコーナー部で車輌上下方向へ延び前輪20L,20R及び後輪30L,30Rを取り付けた鉛直回転軸60と、これらの鉛直回転軸まわりに前輪及び後輪を回転させる回転手段70と、を備えている。
(もっと読む)
カミヤテックトレーラー
【課題】トラクターとトレーラーからなる長尺貨物輸送用車輌において、ヘアーピンスリップを防止するステアリング機構を提供する。
【解決手段】トレーラーの前端部に設置して成るブレーキチャンバー(K)の作動力を、直接、車輪部のアジャスターロットやディスクブレーキの作動力として応用する手段によりトラクター・トレーラーとのブレーキの作動時間差を解消しヘアーピンスリップを防止して、更に梃付ベルクランク型キングピンを装着したトラクター・トレーラーが右旋回走行すればトレーラー側から見た該ベルクランクは梃の働きで右回りのねじり作用が働きトルクが生じベルクランクが右回転運動作用をする効果を得る。該ベルクランクに棒鋼を連結して成る回転作動力伝達機構の設置によりトレーラー後部の車輪のステアリング機構の操作動力として応用し、該梃の働きによってヘアーピンスリップを防止する。
(もっと読む)
乗用型移動農機
【課題】トレッド調整の際にステアリング機構の調整が不要かつ、トレッド変更後でもステアリング感覚が良好な乗用型移動農機を提供する。
【解決手段】乗用管理機のステアリング機構25は、フロントアクスルケース41に平行に設けられた伸縮自在な操向伝動軸90と、操向伝動軸90の両端部をそれぞれ軸支する左右の操向ケース91と、操向ケース91に内装され、機体上下方向に延びた操向軸91と、ファイナルケース34と操向軸92とを連結するリンク機構93とから構成され、操向軸91の回動に連繋してファイナルケース34を回動させて前輪2を操向している。操向ケース91は、上部ケース36と連結して構成されており、トレッド調節の際、車軸支持ケース38と一緒に機体幅方向に移動する。
(もっと読む)
車両用操舵装置
【課題】 通常走行時の操縦安定性を確保しつつ、最大転舵角を大きく取ることができる車両用操舵装置を提供する。
【解決手段】 上側支持点7aと下側支持点とをそれぞれ懸架部材(サブリンク10、アッパーアーム11)を介して車体に支持し、上側支持点7aを車輪1の車幅方向内側の側面16よりも内側に配置したナックル5と、キングピンオフセット量を変更する第1の自由度と、キングピン傾斜角を変更する第2の自由度との2自由度を有し、下側支持点を側面16よりも内側の位置と外側の位置との間で移動可能なキングピン軸変更装置と、操舵状態に応じた目標転舵角θに基づいて、車輪1の転舵角を制御する転舵制御装置19と、目標転舵角θに応じてキングピン軸変更装置を制御するキングピン軸制御装置20と、を備える。
(もっと読む)
キャンバ角制御装置
【課題】走行する車両の安全性を確保することができるキャンバ角制御装置を提供すること。
【解決手段】キャンバ角付与装置4が故障し、前輪2FL,2FRまたは後輪2RL,2RRにおいて双方のキャンバ角が異なると、車両1は、スラスト力の強い方向へ旋回させられるので、車両1の直進性や旋回性が損なわれ安全性が低下してしまう。車両用制御装置100によれば、正常に動作する車輪2のキャンバ角を、異常のある車輪のキャンバ角と等しくなるように制御するので、その結果、双方の車輪2のスラスト力が等しくなり、車両1においてスラスト力が均衡することとなる。すなわち、車両1が旋回させられる力が抑制されるので、車両1の直進性や旋回性が損なわれることを抑制することができる。よって、走行する車両1の安全性を確保することができる。
(もっと読む)
車両用駐車支援装置
【課題】 簡単な制御にて車両を狭い駐車スペースに旋回駐車できるようにする。
【解決手段】 旋回方向と逆側の車両の進行方向側角部Aが初期位置における進行方向側角部Aを通り車幅方向に延びる直線(ラインL1)に沿って移動し、かつ、旋回方向と逆側の車両の反進行方向側角部Bが初期位置における反進行方向側角部Bを通り車両前後方向に延びる直線(ラインL2)に沿って移動するように、4輪の転動距離に対応した目標転舵角を設定する。これにより、ハンドル操作なしに車体サイズの限界に近い狭いL字状コースに車両を進入させて駐車することができる。
(もっと読む)
1 - 20 / 40
[ Back to top ]