
Fターム[3D041AA77]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | ペダル、レバーの作動規制 (28)
Fターム[3D041AA77]に分類される特許
1 - 20 / 28
車両の補助制動装置
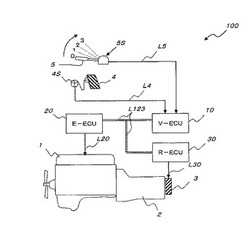
【課題】補助制動装置が作動中でもアクセルペダルの踏み込み量に応じた制動力が得られ、頻繁な加速・減速の繰り返しを防止して、省燃費運転を実現する車両の補助制動装置の提供。
【解決手段】車両電子制御ユニット(10)及びその他の電子制御ユニット(20、30)を有し、車両電子制御ユニット(10)とその他の電子制御ユニットは車両内通信システム(L123)により接続されており、補助制動スィッチ(5)のスイッチ位置を検出する補助制動スイッチ位置検出装置(5S)と、アクセルペダル(4)の踏み込み量を計測するアクセルペダル踏み込み量計測装置(4S)を有している。
(もっと読む)
車両用故障診断装置

【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
自動車運転支援装置および自動車
【課題】大きな力で自動車操縦機器を一定位置または角度で保持する必要がある状況であっても、アクチュエータのエネルギー消費を抑制し、機器の寿命を確保すると共に、装置の小型化を図る。
【解決手段】自動車の運転を支援する自動車運転支援装置であって、駆動力を発生するアクチュエータと、前記アクチュエータが発生した駆動力を一方向にのみ伝達する不可逆機構と、前記不可逆機構から伝達される駆動力を伝達しまたは切断する切り替え機構と、前記駆動力切断機構が前記不可逆機構から伝達される駆動力を伝達するときに、自動車操縦機器へ前記駆動力を伝達する駆動力伝達機構と、を備える。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
無人車両遠隔操作システム
【課題】操作者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部により取得した測距データに基づいて、走行可能エリアを抽出するエリア抽出手段10aと、無人車両の走行状態を取得する走行状態取得手段10bと、取得した無人車両の走行状態と、抽出した走行可能エリアとに基づいて、走行のための操作限界を示す操作限界情報を生成する操作限界情報生成手段10cとを無人車両に設ける一方、生成した操作限界情報を表示部に表示させる操作限界情報表示手段を遠隔操作装置に設けている。
(もっと読む)
衝突安全システム
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置
【課題】車両が搭載するバッテリの消耗を低減した車両制御装置等を実現することを目的とする。
【解決手段】車両に搭載されたバッテリ800を用いて車両を電気的に制御する車両制御装置100において、検知した車両状態に基づき車両の制御の迅速性が必要ではないと判断される場合に、バッテリ800の電流消費を低減するように、制御の通電量を抑制する車両制御装置100とする。好ましくはホイールシリンダを増圧する増圧弁を通電制御して要求制動力に対応する液圧を供給するブレーキ電子制御装置においては、検知した車両の状態に基づき要求制動の迅速性が必要ではないと判断される場合に、増圧弁への通電量を抑制するブレーキ電子制御装置とする。
(もっと読む)
車両制御装置
【課題】検知された障害物の特性に合わせた適切な車両制御を行う。
【解決手段】制御部4が、障害物が移動物であるのか停止物であるのか、及び車両や壁であるのか人や軽車両であるのかに基づいて目標停止距離を変更する。すなわち制御部4は、障害物が人や軽車両である(車両や壁でない)場合には車両や壁である場合と比較して、目標停止距離Dを大きくすることにより制動力を発生させる時点での障害物からの距離を大きく(即ち制動力の発生タイミングを早く)する。これにより、検知された障害物の特性に合わせた適切な車両制御を行うことができる。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】車両の走行を適切に支援できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】定車間制御状態にある場合に所定の条件の少なくともいずれか1つが成立すると、制御装置3は、定車間制御状態から減速支援制御状態に遷移するよう各部を制御するように構成した(状態遷移G)。すなわち、検出された自車両の走行環境に基づいて、または、検出したドライバの操作に基づいて、定車間制御を解除するが、減速支援制御は解除しないように構成した。したがって、定車間制御によって車両が加速されることを防止して、車両の減速を行う減速支援制御を継続できる。これにより、ドライバの意図しない車両挙動を防止しつつ、減速を支援する走行シーンを拡大できるので、走行環境やドライバの操作に応じて適切に車両の走行を支援できる。
(もっと読む)
運転走行支援装置
【課題】運転者に運転能力が低下していることを気付かせ、運転能力が低い状態での運転を減少させる運転走行支援装置を提供する。
【解決手段】運転走行支援装置10は、運転者の覚醒状態又は飲酒状態を検出する運転者状態検出部11と、前記運転者状態検出部11により検出された覚醒状態又は飲酒状態に基づいて、前記運転者の状態を判定する運転状態判定部12と、前記運転状態判定部12により判定された前記運転者の状態に基づいて、アクセル、ブレーキ、ステアリング、車間距離制御手段及び車線維持手段の少なくとも1つの制御特性を変更するように制御する車両制御部13と、を備えている。
(もっと読む)
車両用報知装置
【課題】車速を低下させて警報を与える場合でも、ドライバの運転操作を有効にする。
【解決手段】走行制御システムは、レーダ装置30、障害物検出処理装置2及びコントロ
ーラ5により前方にある物体に自車両が接触する可能性を検出し、さらにコントローラ5
により接触可能性の検出結果に基づいてアクセルペダル4の踏み込み量に対する駆動トル
クの発生量を補正する。ここで、補正は、接触可能性が高いほど、アクセルペダル4の踏
み込み量に対する駆動トルクの発生量を少なくする補正である。
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
運搬車のスロットル操作装置
【課題】運搬車や、移動農作業機等にあっては、走行時にスロットルレバーを所定の位置で保持できる機構を有するスロットルレバーが用いられることが多い。このような形態において、エンジンを高速回転に設定しているとき、ブレーキ操作をしてもエンジントルクが強いためにブレーキが効き難いことがあり、咄嗟のときは危険である。
【解決手段】摩擦機構3を介して操作設定位置を維持可能のスロットルレバー2と、ブレーキ連動のブレーキレバー4を、スプリング5を介して連動構成して、ブレーキ操作を行うことによってこのスロットルレバー2の設定位置に拘らずエンジン回転を下げると共に、該ブレーキレバー4を制動解除することにより、スプリング5によりスロットルをスロットルレバー2による操作設定位置へ復帰することを特徴とする運搬車のスロットル操作装置。
(もっと読む)
車両の衝突防止装置
【課題】運転者の入力操作による車両の運動制御と衝突防止装置による車両の運動制御との調整を行い、衝突回避能力を高いレベルに保ちつつ、車両の運動に対する運転者への違和感をできるだけ少なくした車両制御を実現できる衝突防止装置を提供することである。
【解決手段】運転者の運転状況検出手段11と、車両周囲の障害物の情報を基に障害物との衝突を回避するための回避運動計算手段12と、前記回避運動計算手段12の回避運動計算結果と前記運転状況検出手段11で検出した運転者の入力操作とを合成して障害物との衝突を回避する車両行動決定手段13と、前記車両行動決定手段で決定した車両行動に基づいて運転操作の支援を行う運転支援手段14を有し、車両行動決定手段13は、運動マップ上で運転者の入力操作と回避運動計算結果とに重み付けして運転者の入力操作と回避運動計算結果とを合成して障害物との衝突を回避するための車両行動を決定する。
(もっと読む)
車両用運転操作補助装置
【課題】運転者による前後方向および左右方向の運転操作を適切にアシストすることができる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置1は、自車両の周囲に存在する障害物を検出する障害物検出手段10,20,21,30と、障害物検出手段10,20,21,30による検出状況に基づいて、自車両に対する障害物の存在方向、相対距離および相対速度をそれぞれ検出する障害物認識手段50と、障害物認識手段50からの信号に基づいて、自車両の障害物に対するリスク度を算出するリスク度判定手段50と、リスク度判定手段50からの信号に基づいて、運転者による自車両の前後運動および左右運動に関わる運転操作を促すように、車両機器の作動を制御する車両機器操作量制御手段60,80,90と、車両機器操作量制御手段60,80,90における前後方向の制御量および左右方向の制御量の配分をそれぞれ調整する配分調整手段50とを有する。
(もっと読む)
運転装置の制御装置
【課題】モードの設定が初期化された場合であっても、操作性の問題の発生を防止できる運転装置の制御装置を提供する。
【解決手段】障害者が運転するための障害者モードと健常者が運転するための健常者モードとが選択的に設定される運転装置を制御するためのECU50において、ECU50にリセットが発生したことによりモードの設定が初期化された場合に、初期化前に設定されていたモードに再設定する。これにより、モードの設定が初期化された場合であっても、操作性の問題の発生を防止できる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
車両制御装置
【課題】取得した生体情報に基づいて、より正確な必要性判断のもと運転支援を行う。
【解決手段】心拍等の生体情報が所定の閾値(基準値)を越えたかい否かを、警告や車両制御等の運転操作支援を行うか否かを判断するための条件とし、この生体情報の閾値を、同乗者の有無に応じて変更する。これにより、従来よりも、より正確な運転者支援を行うことができるようになる。
すなわち、一人で運転している時と、隣に上司などの普段から緊張する相手が同乗している場合とでは、通常時の生体情報が異なるため、同じ閾値で判定できない。
そこで、同乗者によって緊張度が増している場合は、その緊張度を踏まえて閾値を設定し、運転操作に対する緊張度を検出しやすくする。
(もっと読む)
運転装置の制御装置及び制御方法
【課題】誤作動に基づく運転性の悪化を防止する運転装置の制御装置及び制御方法を提供する。
【解決手段】運転装置の制御装置は、車両に走行指示を与えるレバーを有する運転装置を制御するための制御装置において、操作レバー12及び/又はハンドル60が握られているかどうかを検出する検出手段54と、検出手段の検出結果に基づき、操作レバー及び/又はハンドルを握られていないときは、操作レバー12による車両への走行制御を禁止する駆動制御手段52とを備えている。これにより、誤作動に基づく運転性の悪化を防止することができる。
(もっと読む)
1 - 20 / 28
[ Back to top ]