
Fターム[3D041AA80]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | 故障診断、警報 (143)
Fターム[3D041AA80]に分類される特許
1 - 20 / 143
走行支援装置
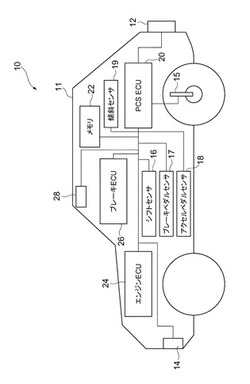
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
車両の挙動制御装置

【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
車両用故障診断装置
【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両制御装置
【課題】先行車の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することのできる車両制御装置を提供すること。
【解決手段】自車1の前方の先行車100の車車間通信情報に基づいて、自車1が先行車100に追従する追従走行制御中に、自車1が先行車100の車車間通信情報を取得する際における取得状況に応じて、追従走行制御時のパラメータを決定する。これにより、車車間通信情報の取得状況に応じた追従走行制御を行うことができ、例えば、先行車100の車車間通信情報を適切に取得できる場合には、取得した車車間通信情報を用いて理想的な追従走行制御を行い、先行車100の車車間通信情報の取得が困難な場合には、車車間通信情報に対する依存性を低くして追従走行制御を行うことができる。この結果、先行車100の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
車両制御装置
【課題】死角から物体が出現した場合であっても適切な走行支援を行うことのできる車両制御装置を提供する。
【解決手段】物体認識部16は、物体の存在の確からしさを示す確信度を演算することによって、物体検出部3によって検出された物体の認識を行う。また、物体認識部16は、検出された物体が死角から出現した物体であると判定した場合、通常時に比して確信度を増加するように演算する。物体認識部16は、確信度が通常時に比して増加するように演算することができるため、死角から急に出現した物体に対しては、物体検出部3での検出から認識するまでの間に要する時間を短くすることができる。認識するまでの時間を短くすることによって、その後の処理を早期に行うことが可能となるため、死角から急に出現した物体に対しても十分な時間を確保して適切な走行支援を行うことができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】切り替え機構の故障時における好適なフェールセーフを実現する。
【解決手段】
内燃機関(200)と、動力伝達機構(400)と、第1電動発電機(MG1)と、駆動軸(600)との間で動力の入出力が可能に構成された第2電動発電機(MG2)と、蓄電手段(12)と、動力伝達機構に備わる一の回転要素(S2)の状態をロック状態と非ロック状態との間で選択的に切り替え可能なロック機構(500)とを備えたハイブリッド車両は、ロック機構が固定変速モードから無段変速モードへ変速モードを切り替え可能な正常状態にあるか否かを判別する判別手段(100)と、ロック機構が正常状態にないと判別され且つ変速モードとして固定変速モードが選択されるフェールセーフ要求期間において、第2電動発電機の電力回生量をロック機構が正常状態にある場合と較べて増加側へ補正する補正手段(100)とを具備する。
(もっと読む)
走行制御装置
【課題】レーダ装置の発熱および劣化が生じることを的確に抑制する。
【解決手段】走行制御装置10は、先行車両に対する追従走行と渋滞追従走行とを制御する制御ステート決定部34と、追従走行の実行時に自車両の進行方向に向けて発信する電磁波の出力を増大させる出力増大モードを実行し、かつ出力増大モードよりも電磁波の出力を低減させる出力低減モードを所定時間間隔毎に一時的に出力増大モードから切り替えて実行し、渋滞追従走行の実行時には、出力低減モードを実行する発信部11aと、追従走行の実行時に、出力増大モードの反射波の反射レベルと出力低減モードの反射波の反射レベルとの比較結果に基づき、出力増大モードと出力低減モードとの切り替えの異常の有無を判定する切替異常判定部36とを備え、制御ステート決定部34は、切替異常判定部36の判定結果において異常が有る場合に渋滞追従動作の実行を禁止する。
(もっと読む)
状態推定装置
【課題】状態推定装置において、移動体に加速度が加わっている場合であっても、乗員の状態を推定可能とすること。
【解決手段】状態推定処理では、加速度センサから取得した加速度から加速度変化量を、解析処理にて導出した脈波伝播速度からPTT変化量を導出する(S150)。予め用意された状態対応関係群の中から、乗員によって入力された分類情報に一致する分類情報を有した状態対応関係に、導出された加速度変化量及びPTT変化量を照合する(S160)。このとき、照合された加速度変化量及びPTT変化量に最も類似する情報からなる第1対応関係に対応付けられた血管硬さが、乗員の血管硬さ、ひいては乗員の状態として推定される。
(もっと読む)
車両の駆動力制御装置
【課題】 後輪車輪速センサの異常時に対して、トランスミッションの保護および車両のドライバビリティの確保を両立させる。
【解決手段】 少なくとも後輪車輪速センサにより検出された後輪車輪速を用いて低摩擦係数路面を判定し、低摩擦係数路面が判定されるとフュエルカットやシフトチェンジの制限を行ってトランスミッションの保護を図るものにおいて、(a)後輪車輪速センサが異常であること(ステップS114)、(b)シフトレンジがリバースレンジからドライブレンジに操作されてから所定時間が経過したこと(ステップS112)、(c)変速段が3速以上になったこと(ステップS113)の各条件のうち、(a)の条件が成立した場合、あるいは(b)の条件および(c)の条件の少なくとも一方が成立した場合に、異常の可能性がある後輪車輪速を用いた低摩擦係数路面の判定を禁止し、トランスミッションの出力軸回転数から算出した車輪速で後輪車輪速を代用する。
(もっと読む)
衝突安全システム
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
車両運転支援装置
【課題】道路インフラ側の整備や交信機能の普及向上を要することなく、逆光によって運転者に見え難くなった交通信号機や道路標識などの交通情報を認識可能にして、その交通情報に従った対応を行なうことで、運転者が交通情報を見落として重大な事故を引き起こすことを未然に且つ確実に防止する。
【解決手段】車両前方画像から交通情報の存在する領域が分割され、その領域の明度分散が算出され、明度分散が所定値を超える領域が候補領域として認識される。候補領域が認識されると、その候補領域における交通情報の認識が可能になる絞り値が、その候補領域の明度分散に基づいて算出され、その絞り値で車両前方画像が再撮像される。
(もっと読む)
1 - 20 / 143
[ Back to top ]