
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
61 - 80 / 1,660
車両運動制御装置
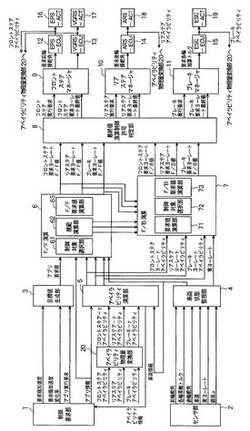
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
アイドリングストップ制御装置
【課題】従来よりもアイドリングストップの時間帯を長くして一層燃費を向上するとともに、エンジンの自動始動による車両発進時の安全性を向上したアイドリングストップ制御装置を提供する。
【解決手段】エンジンにクラッチを介して変速機を連結し、エンジンを自動停止および自動始動するアイドリングストップ制御装置であって、始動条件は、クラッチが断状態とされ、かつブレーキ操作部材の操作量が減少しあるいは無くなることを必要条件として含み、自動停止中にブレーキ操作部材の操作量に関わらず所定の制動力を発生して保持する手段(S29)と、自動停止中に始動条件が成立したか否かを判定する手段(S21〜S28)と、始動条件が成立するとエンジンを自動始動する手段(S30)と、ブレーキ操作部材の操作量が減少しあるいは無くなったときから所定の保持時間が経過すると所定の制動力を解除する手段(S34、S36)と、を有する。
(もっと読む)
車両の走行制御装置
【課題】発進クラッチを締結するときであってもエンジンストールを生じさせない車両の走行制御装置を提供する。
【解決手段】内燃エンジンの冷却水温に基づいて第1アイドル回転速度を演算する第1演算部(S1)と、自動変速機の作動液の温度に基づいて第2アイドル回転速度を演算する第2演算部(S2)と、第1アイドル回転速度及び第2アイドル回転速度のうちいずれか高いほうを目標アイドル回転速度として設定する目標アイドル回転速度設定部(S3〜5)と、目標アイドル回転速度で内燃エンジンを運転して、モータージェネレーター及び駆動輪の間に配置された発進クラッチをスリップ制御する発進クラッチ制御部(S6)と、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン始動の遅れを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 変速機の変速時に変速機内の開放側の摩擦締結要素を開放して変速を行うニュートラル変速中にエンジン側締結要素を締結してエンジンを始動するニュートラル変速始動モードと、ニュートラル変速でないときにエンジン側締結要素を締結してエンジンを始動する通常始動モードとを有し、ニュートラル変速始動モードのときのエンジン側締結要素の締結速度を、通常始動モードのときのエンジン側締結要素の締結速度よりも速くするようにした。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第1締結要素を解放する際に、第2締結要素の発熱量を抑制しつつ、エンジンの吹き上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEを駆動しつつ、第1締結要素CL1を締結し、第2締結要素CL2をスリップ制御している状態から、第1締結要素CL1を解放する際に、目標エンジントルクが設定値以下となってから第1締結要素CL1を解放するまでの待ち時間を、第2締結要素CL2の温度が高いほどおよび/または目標駆動トルクが大きいほど短く設定するようにした。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の制御装置
【課題】ロックアップクラッチを有する流体式動力伝達装置を搭載した車両に対し、燃料消費率の更なる改善を図ることが可能な車両の制御装置を提供する。
【解決手段】ロックアップクラッチ付きのトルクコンバータを搭載した車両に対し、ロックアップクラッチの減速時スリップ制御時、ロックアップクラッチの油圧学習が未完了の場合にはロックアップ解放車速を高く(V2に)設定し、ロックアップクラッチの油圧学習が完了した場合にはロックアップ解放車速を低く(V2’に)設定する。また、車両の定常走行時、ロックアップクラッチの油圧学習が未完了の場合にはエンジン回転数を高く設定し、ロックアップクラッチの油圧学習が完了した場合にはエンジン回転数を低く設定する。
(もっと読む)
車両用駆動システム
【課題】エコラン走行中のエンジン再始動時にてクラッチを開放状態から係合状態に切り替えるときに発生する振動を抑制できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、車両走行中にて、所定のエンジン停止条件の成立によりエンジン2を停止させると共に、所定のエンジン再始動条件の成立によりエンジン2を再始動させるエコラン制御を行う。また、車両用駆動システム1は、エンジン2からの駆動力を変速して出力する変速機5と、エンジン2から変速機5への駆動力の伝達を係合状態にて許容すると共に開放状態にて遮断するクラッチ4と、変速機5およびクラッチ4を制御する制御装置7とを備える。そして、制御装置7は、車両走行中であってエンジン停止条件が成立してクラッチ4を係合状態から開放状態に切り替えるときに、変速機5の変速比γを増加させる変速比増加制御を行う。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】バッテリの内部抵抗が高くても過電圧を抑制し、バッテリを保護する。
【解決手段】内燃機関10と、電動発電機20と、前記内燃機関の出力軸及び前記電動発電機の出力軸に直接的又は間接的に接続された駆動車輪54と、前記電動発電機と前記駆動車輪との間の駆動力を断接するクラッチ25と、前記電動発電機に電力を供給するとともに前記電動発電機からの電力を充電するバッテリ30とを備えたハイブリッド車両に対し、制御信号を出力する制御装置であって、前記内燃機関を少なくともアイドル回転数で駆動する要求と、前記電動発電機を回生駆動する要求と、前記バッテリの内部抵抗値が所定値以上であることを検出した場合に、前記内燃機関の回転数制御を実行する制御手段60を備える。
(もっと読む)
ハイブリッド車両の制御装置自動車の発電制御
【課題】強制発電モードでありかつ減速コースト運転中である場合において特定の条件ではエンジンをフュエルカットすることとして燃費を向上させる。
【解決手段】強制発電モードでありかつ減速コースト運転中であると判定された場合に、エンジンをフュエルカットしたときバッテリから放電されるフュエルカット時バッテリ放電条件であるのか、それともエンジンをフュエルカットしたときバッテリに充電されるフュエルカット時バッテリ充電条件であるのかを判定し(S3)と、この判定結果よりフュエルカット時バッテリ放電条件であると判定された場合に作動状態のエンジンでモータジェネレータを連れ回しての発電を行わせ(S7、S8)、フュエルカット時バッテリ充電条件であると判定された場合にエンジンをフュエルカットする(S5、S6)。
(もっと読む)
火花点火内燃機関
【課題】ハイブリッド車両の火花点火内燃機関において、車両減速時にモータ・ジェネレータを発電機として作動させることができないときに、火花点火内燃機関の振動及び騒音の増大を抑制して比較的大きなエンジンブレーキを発生させる。
【解決手段】モータ・ジェネレータと共にハイブリッド車両に組み込まれる火花点火内燃機関において、機械圧縮比可変機構を具備し、車両減速時に前記モータ・ジェネレータを発電機として作動させることができないときには(ステップ102)、自動変速器により機関回転数を高める(ステップ109)と共に機械圧縮比可変機構により実圧縮比を低下させる(ステップ108)。
(もっと読む)
車両の駆動力制御装置
【課題】 アクセルオフによりドライブ走行からコースト走行へ移行する際のショックの緩和と空走感の抑制とを両立できる車両の駆動力制御装置を提供する。
【解決手段】 目標駆動力tFoを算出する目標駆動力演算部30と、推定駆動力Fo^を算出する実駆動力推定手段と、目標駆動力tFoと推定駆動力Fo^との偏差である駆動力偏差ΔFoが減少方向に変化している場合、目標駆動力tFoが所定のトルク閾値Fo_th未満のときには目標駆動力tFoがトルク閾値Fo_th以上のときよりも目標駆動力tFoの変化率を大きく制限する駆動力変化率制限部61と、を備えた。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】自動変速機の入力軸に動力伝達可能に連結された電動機を備える車両用動力伝達装置において、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフトの際にガタ打ちに伴うショックを抑制する。
【解決手段】車両10が被駆動状態であるときに変速機入力トルクTATを零に向かって制御する際にその変速機入力トルクTATが零に近づくに伴って、車両状態に基づいて変速機入力トルク変化率が抑制されるので、ガタ打ちに伴う振動が抑制される。また、そのガタ打ちを起振源とするガタ打ち後の振動も抑制される。よって、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフト時において、ガタ打ちに伴うショック(すなわちガタ打ちショックやガタ打ち後の振動的なショック)や歯打ち音が抑制される。
(もっと読む)
61 - 80 / 1,660
[ Back to top ]