
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
121 - 140 / 1,660
速度制御装置
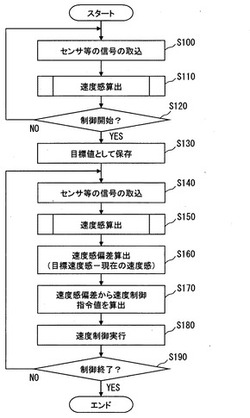
【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
変速制御装置

【課題】アップシフト制御中にアクセル開度が低開度状態に変化した場合でも、入力部材の回転速度を精度良く制御でき、トルクショックが車輪側に伝達されることを抑制する。
【解決手段】回転電機を有する駆動力源に連結される入力部材と、車輪に連結される出力部材と、入力部材の回転速度を各変速段の変速比で変速して出力部材に伝達する変速機構と、を備えた変速装置を制御する変速制御装置であって、解放側の摩擦係合要素の油圧指令を制御する解放側油圧制御部と、駆動力源から出力される駆動力を増加させる駆動力増加制御の指示を行う駆動力増加制御指示部と、アクセル低開度状態である場合に、解放側の摩擦係合要素が解放状態であるか否かを判定する解放判定部と、を備え、解放状態でないと判定された場合に解放側要素の油圧指令を入力部材の回転速度の変化に応じて制御し、解放状態であると判定された場合に駆動力増加制御の指示を行う。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両制御装置
【課題】先行車の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することのできる車両制御装置を提供すること。
【解決手段】自車1の前方の先行車100の車車間通信情報に基づいて、自車1が先行車100に追従する追従走行制御中に、自車1が先行車100の車車間通信情報を取得する際における取得状況に応じて、追従走行制御時のパラメータを決定する。これにより、車車間通信情報の取得状況に応じた追従走行制御を行うことができ、例えば、先行車100の車車間通信情報を適切に取得できる場合には、取得した車車間通信情報を用いて理想的な追従走行制御を行い、先行車100の車車間通信情報の取得が困難な場合には、車車間通信情報に対する依存性を低くして追従走行制御を行うことができる。この結果、先行車100の車車間通信情報の取得状況に関わらず、適切な追従走行を維持することができる。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、クラッチを用いた動力伝達モードの切替えを好適に行う。
【解決手段】ハイブリッド車両の制御装置(100)は、第1電動機(MG1)、第2電動機(MG2)及び内燃機関(200)を含む動力要素と、駆動軸(500)と、第1回転要素(S1)、第2回転要素(R1)、第3回転要素(C1)を有する動力伝達機構(300)と、クラッチ(710)と、第2ブレーキ(720)とを備えたハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、第1モード及び第2モードの間で、動力伝達モードを切替える切替手段(150)と、クラッチの回転数を検出するクラッチ回転数検出手段(130)と、クラッチの回転数が第1所定値以下である場合に、第1モードから第2モードへの動力伝達モードの切替えを停止する切替停止手段(140)とを備える。
(もっと読む)
車両制御装置
【課題】自車の走行時の状態に応じて、より適切な走行モードに切替えることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する通信追従走行制御と、先行車100と自車1との間の位置関係情報をレーダー12で取得し、取得した位置関係情報に基づいて自車1の走行状態を制御する自律追従走行制御と、を切替えて追従走行が可能な走行制御ECU20を備え、通信追従走行制御中に通信追従走行制御を行うことが困難になった場合には自律追従走行制御に切替え、且つ、切替え後の自車1と先行車100との車間距離または車間時間を通信追従走行制御中における車間距離または車間時間よりも大きくする。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】噛合クラッチ接続時に発生するショックを抑制することができると共に、噛合クラッチにかかる負荷を低減することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】車両走行中のシンクロクラッチ42の接続が、電動機30のトルクTmが略零の状態で実施されるため、クラッチ接続時において前輪車軸26への電動機30のトルク伝達が発生しないに従い、接続時に発生するショックを抑制することができる。また、シンクロクラッチ接続時において電動機30のトルクTmが零であるため、シンクロクラッチ42の前後の回転速度が同期されると、シンクロクラッチ42がスムーズに接続されるに従い、シンクロクラッチ42にかかる負荷が低減され、シンクロクラッチ42の耐久性低下が抑制される。
(もっと読む)
惰行制御装置
【課題】車両振動の影響による惰行制御の終了を防止できる惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのクラッチ回転数とアクセル開度のプロット点が惰行制御可能領域内にあって、アクセルペダル操作速度が所定範囲内にて、かつクラッチ回転数とアクセル開度のプロット点が惰行制御しきい線をアクセル開度減少方向に通過したとき、クラッチを断すると共にエンジン回転数を低下させて惰行制御を開始し、アクセルペダル操作速度が所定範囲外となったか又はプロット点が惰行制御可能領域外に出たとき惰行制御を終了する惰行制御実行部3と、アクセルペダル操作加速度が車両振動判定値範囲外のときには、惰行制御実行部3による惰行制御開始・終了の判定を無効とし、アクセルペダル操作加速度が車両振動判定値範囲内のときは、惰行制御実行部3による惰行制御開始・終了の判定を有効とする振動影響除去部4とを備える。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
惰行制御装置
【課題】エンジンブレーキを確実に作動できる惰行制御装置を提供する。
【解決手段】
クラッチ回転数とアクセル開度により決定される運転状態が、アクセル開度が減少している状態で、惰行制御が可能な運転状態範囲を設定した惰行制御可能領域内になったときに、惰行制御を開始し、前記運転状態が惰行制御可能領域外になったときに、惰行制御を終了する惰行制御実行部3と、惰行制御中にアクセル開度がアクセル開放判定値以下となったときには、惰行制御を終了させるアクセル開放時惰行制御終了部4とを備える。
(もっと読む)
惰行制御装置
【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
ハイブリッド車の制御装置
【課題】ハイブリッド車の制御装置に関し、エンジン走行中にエンジンの出力が過剰になったらエンジンの不要な吹け上がりやこれによるエンジンのオーバーランを防止しながらクラッチを開放することができるようにする。
【解決手段】電動モータ1及びエンジン2を走行用駆動源として備えたハイブリッド車の制御装置において、エンジン2からの駆動力を車両の駆動輪に伝達可能とする動力断接クラッチ4と、エンジン2に接続された発電機3と、エンジンの状態量を検出する状態量検出手段74と、車両の状態に基づいてエンジンから出力されるべき目標状態量を算出する目標状態量算出手段75と、動力断接クラッチ4が接続されてエンジンの駆動力により車両が走行している際に状態量と目標状態量との差が所定量以上となると、発電機3でエンジンの回転数を抑制し、エンジンの回転数抑制が始まった後に動力断接クラッチ4を開放させる制御手段7とをそなえる。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
走行制御装置
【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
121 - 140 / 1,660
[ Back to top ]