
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
141 - 160 / 1,660
惰行制御装置
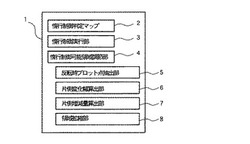
【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
運転操作支援装置、運転操作支援方法

【課題】停車状態を維持するための制動力を運転者のアクセル操作に応じて解除して車両を発進させる際に、車速コントロールの操作性を向上させる。
【解決手段】アクセル操作量Saが第一の閾値th1以下のときには、最終制動力指令値FBを保持制動力指令値FBPKBとし、アクセル操作量Saが第一の閾値th1を超えるときには、アクセル操作量Saが大きいほど、保持制動力指令値FBPKB未満の範囲で最終制動力指令値FBを小さくする(ステップS109)。一方、アクセル操作量Saが第二の閾値th2以下のときには、駆動力指令値FAはクリープトルクTcに設定し、アクセル操作量Saが第二の閾値th2を超えると、アクセル操作量Saが大きいほど、クリープトルクTcよりも大きな範囲で駆動力指令値FAを大きくする(S112)。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
惰行制御装置
【課題】惰行制御終了時にタイヤがロックしてしまうなどの危険なモードを回避することが可能な惰行制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落とす惰行制御を行う惰行制御装置において、惰行制御中に変速の操作を禁止する変速禁止手段6を備えたものである。
(もっと読む)
惰行制御装置
【課題】ドライバーのアクセル操作に応じた惰行制御を行うことができ、ドライバーの不快感を低減可能な惰行制御装置を提供する。
【解決手段】所定の学習開始条件を満たし、かつ、アクセル開度速度が、惰行制御開始条件、あるいは惰行制御終了条件で設定されているしきい値範囲外となったとき、当該アクセル開度速度の大きさに応じて、前記しきい値範囲を拡大するアクセル開度速度学習手段6を備えた。
(もっと読む)
車両の統合制御装置
【課題】自動操舵機構の有する過渡時における応答性の問題を適切に補償して、通常走行時の快適性を保つことはもちろん、理想のハンドリング性能を実現する。
【解決手段】制御ユニット50の操舵制御部20では、ハンドル角θHd、ハンドル角速度(dθHd/dt)により目標舵角δtを算出し、モータ回転角θMを算出して、このモータ回転角θMを、ギヤ、モータの慣性等に起因する振動を抑制する為、所定のローパスフィルタによる処理や不感帯処理を行って、モータ駆動部21に出力する。サス_ECU40では、ハンドル角速度(dθHd/dt)に基づいて、減衰力補正基本値Cpを設定し、減衰力補正値Cを算出して、ストローク速度(dST/dt)、減衰力補正値Cを基に減衰力Faを設定し、所定のローパスフィルタによる処理等を行って出力する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
障害物回避装置
【課題】自車両周辺の障害物を高精度に認識しながら、当該認識された障害物および/または当該認識の信頼性に応じて、適切なタイミングで衝突回避システムを作動させる障害物回避装置を提供する。
【解決手段】本発明の障害物回避装置は、障害物を検知する複数の検知手段と、複数の検知手段によって検知された障害物に関する情報に基づいて、複数の検知手段によって検知されたそれぞれの検知結果に相関性があるか否かを判定する相関性判定手段と、相関性判定手段によって判定された判定結果に応じて、衝突回避システムを制御する障害物回避制御手段とを備え、障害物回避制御手段は、相関性判定手段によって相関性があると判定された場合、相関性がないと判定された場合に作動させるタイミングより早いタイミングで衝突回避システムを作動させることを特徴とする。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
ドライバ状態検出装置
【課題】ドライバの意識喪失状態をより早い段階で検出することができるドライバ状態検出装置を提供する。
【解決手段】本発明に係るドライバ状態検出装置1では、ドライバの操舵特性であるモデルパラメータを予め算出し、車線と車両の偏差に対して、そのドライバが本来操作すると考えられる推定舵角を算出する。その推定舵角と実舵角とのずれに基づいて見かけ上の目標コースを算出し、意識喪失判定に用いる。見かけ上の目標コースが車線中心から単調に外れた場合には、それは意識喪失状態であると判断する。また、モデルパラメータが小さい場合に発生する誤判定を回避するために、自車両の進行方向の延長線上に見かけ上の目標コースがある場合にのみ意識喪失判定を行う。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
車両の動力伝達制御装置
【課題】アイドルストップ機能によって内燃機関の運転が停止している場合においてもクラッチのスタンバイ位置を取得できる動力伝達制御装置を提供すること。
【解決手段】車両が停止中、且つ、変速機がニュートラル状態にあり、且つ、クラッチが分断状態(クラッチストローク=0)にあり、且つ、内燃機関の運転がアイドルストップ機能によって停止している場合において、内燃機関に燃料を噴射することなくスタータモータを駆動することにより、内燃機関の出力軸が回転する状態が確保される。即ち、内燃機関の出力軸が回転する一方で、変速機の入力軸が回転していない状態が得られる。この状態においてクラッチストロークが調整されて、変速機の入力軸の回転速度の推移に基づいて、クラッチのスタンバイ位置が取得される。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両駆動システムの制御装置
【課題】内燃機関の出力を一定にしながら回転数を変更することが可能な車両駆動システムにおいて、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率が最大となる回転数まで内燃機関の回転数を速やかに変化させる。
【解決手段】回転数の許容最大変化量を出力に関連付けて記憶装置に記憶しておく。要求出力に応じた許容最大変化量を記憶装置から読み出し、予め設定された動作線上の回転数を初期値として許容最大変化量で回転数を変化させていく。そして、回転数が変更される度に、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率を計算し、システム効率が最大となる回転数を特定する。そして、システム効率が最大となる回転数を最適回転数として確定する。
(もっと読む)
車両の制振制御装置
【課題】旋回性能を向上可能な車両の制振制御装置を提供すること。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車両のピッチング振動とバウンス振動を抑制するような補正トルクを算出する補正トルク算出手段54と、前記補正トルクに基づいて前記制駆動トルク発生手段に対し補正トルク指令値を出力する補正トルク指令値出力手段56と、車両のピッチング振動よりもバウンス振動を優先的に抑制するような補正トルク指令値を算出するための優先度合いを設定する優先度合い設定手段55とを備えた。
(もっと読む)
自動車走行制御装置
【課題】 アクセルペダルの誤操作踏込事故を防止できる自動車走行制御装置を提供すること。
【解決手段】 アクセルペダルの急激な踏み込みを阻止する方向の抵抗力を発生する抵抗力発生機構を設け、上記抵抗力に抗してアクセルペダルを踏み込んだときオンする動作スイッチを設け、アクセルペダルアームにアクセルペダルの踏み込みによりオンするアクセルアームスイッチを設け、上記動作スイッチのオン状態において電源バッテリーを上記アクセルアームスイッチに供給可能に構成し、上記アクセルアームスイッチのオン状態において上記電源バッテリーを該アクセルアームスイッチを介して配電部に供給することにより燃料カット装置を作動し得るように構成し、上記アクセルペダルの上記抵抗力に抗しての急速な踏み込みに基づく上記動作スイッチと上記アクセルアームスイッチのオンに基づいて上記燃料カット装置を作動させる。
(もっと読む)
車両の制振制御装置
【課題】走行状況に応じた制振トルクを算出することが可能な車両の制振制御装置を提供する。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクを算出する第1補正トルク算出手段と、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクを算出する第2補正トルク算出手段と、走行状態に基づいて前記第1補正トルクと前記第2補正トルクに所定の重み付けをした補正トルク指令値を算出し、前記制駆動トルク発生手段に出力する入力信号処理手段と、を備え、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクと、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクとに、走行状態に基づいて所定の重み付けを行う。
(もっと読む)
141 - 160 / 1,660
[ Back to top ]