
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
1,641 - 1,660 / 1,660
ロックアップ及びロックアップ解除を操作するための自動変速機の制御装置及び制御方法
ロックアップを実行するために、エンジン(4)の出力軸と自動変速機(7)の入力軸とを直結し、逆に、ロックアップ解除を実行するために、エンジンの出力軸と自動変速機の入力軸とを分離する、ロックアップ装置(6)を含むトルクコンバータ(5)を介してエンジン(4)へ連結され、さらに、エンジン(4)へトルク要求を含む指令を伝達するためのエンジンの操作装置(2)と、エンジンの操作装置(2)へトルク設定値を含む指令を伝達するための自動変速機の操作装置(3)を含む自動変速機の制御装置において、ロックアップまたはロックアップ解除の実行を可能にするために、自動変速機の操作装置は、エンジンの操作装置へ、エンジンの出力軸と自動変速機の入力軸との間のスリップと、運転者が要求するトルクの値に応じて、エンジンの回転数がトルクコンバータのタービンの回転数に到達することを可能にする、トルク設定値を伝達することを特徴とする。 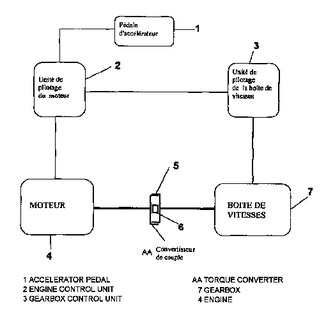 (もっと読む)
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 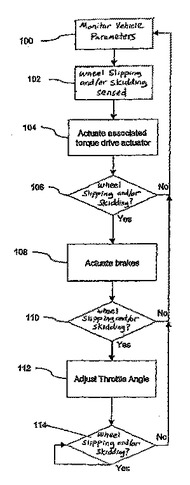 (もっと読む)
(もっと読む)
動的な軸重移動を補償する方法
本発明は、車両の荷重の一部が少なくとも一方の前輪の上に偏るときの動的な軸重移動を少なくとも部分的に補償する、改善された方法を提案する。まず、軸重移動を補償するために、駆動トルク要求が与えられ、したがって、時間制限付きのほぼ最大の駆動トルクが要求される。さらに、本発明は、特許請求の範囲に記載の方法を実施するマイクロプロセッサ及び制御装置を初めて提案する。本発明は、このタイプの制御装置又はプロセッサが取り付けられる車両駆動装置にも関する。本方法を実施するソフトウェアも記載される。最後に、本発明は、特許請求の範囲に記載の方法を実施するソフトウェアを実行するために、このタイプの制御装置又はマイクロプロセッサを備える自動車に関する。  (もっと読む)
(もっと読む)
自動車両用の速度調整システム
本発明は、設定可能な目標・速度に依存して駆動モーメント又は制動モーメントを計算するための手段を備えた自動車両用の速度調整システムに関し、この際、目標・速度は操作可能な操作要素の単一操作により設定される。本発明に従い、操作要素を継続操作する場合には目標・速度に代わり目標・加速度が設定され、この目標・加速度から駆動モーメント又は制動モーメントが計算される。 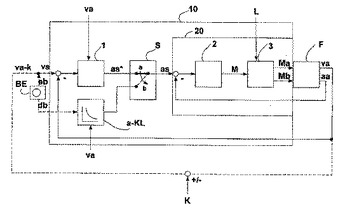 (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。 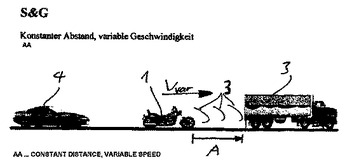 (もっと読む)
(もっと読む)
自動車のための距離制御付き速度制限方法及び速度制限装置
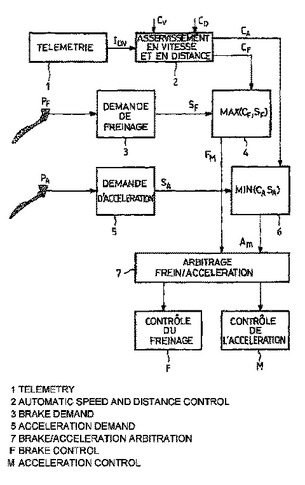
本発明は、測距手段と、距離と速度を制御するためのエンジン動作制御手段とが装備された自動車のための距離制御付き速度制限方法及び速度制限装置に関する。本発明の方法は、速度制限方法の起動後に、設定速度を選定し、同じ走行車線に、より低速な自動車が存在しない場合には、自動車の速度が設定速度以下である限りは、アクセルペダルに対する運転者の操作によって、また、設定速度に達するか超過するときには、速度制限方法の非活性化の可能性付きの、自動制御によってエンジントルクを制限することからなる。装備された自動車の前方に、より低速な目標自動車の存在する場合には、本方法は、速度の自動減速と、運転者によって調整可能な、2つの上記自動車の間の一定追随時間の維持と、速度制限方法の非活性化を伴わないで、運転者に本方法によって決定された速度の減速を許容することからなる。
 (もっと読む)
(もっと読む)
自動変速機内でのオーバーラップシフトの自然発生性を高める方法
本発明は、自動変速機内のオーバーラップシフト操作の自然発生性の増大方法に関する。エンジン点火が、シフト命令と共に、あるいはその直後に、指示される。これによって、スイッチオフされるべき回路エレメントが開放され、及び/または、回転速度グラジエント(タービンの回転速度)が増大される。 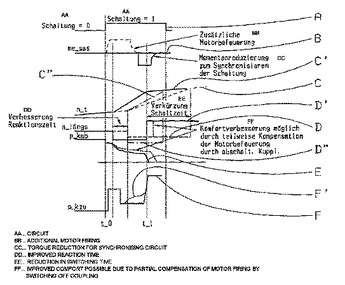 (もっと読む)
(もっと読む)
惰性運転における車両駆動ユニットの運転方法および装置
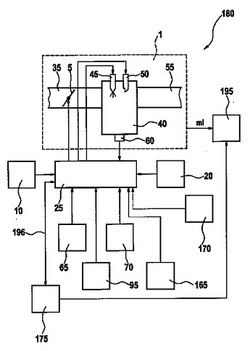
【課題】惰性運転において燃料消費量を低減させる、車両駆動ユニットの運転方法および装置を提供する。
【解決手段】駆動ユニット(180)の惰性運転において、駆動ユニット(180)の出力変数が事前設定走行方式により設定される、車両駆動ユニット(180)の運転方法において、駆動ユニット(180)の惰性運転に対して少なくとも2つの事前設定走行方式が設定され、惰性運転において、事前設定走行方式のいずれかが走行状況の関数として選択される。
(もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。 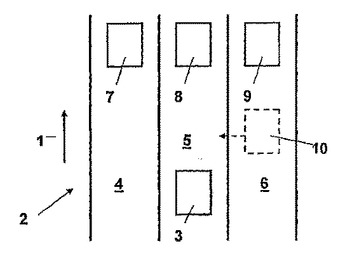 (もっと読む)
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車両内で距離を制御する方法及び装置に関する。本発明に従って、車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。 さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定される。前記重み付け値から、距離変数のための設定値(dsetp)が決定され、これにより、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう制御される。本発明は、重み付け値(gi)を共に掛け合わせて、距離変数の設定値(dsetp)を決定することを特徴とする。
 (もっと読む)
(もっと読む)
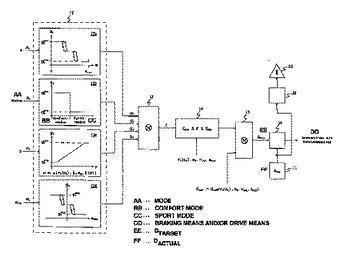
事故による損傷を低減する方法及び装置
この発明は、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない場合に、事故による損傷を低減するための方法及び装置に関する。その場合に、この発明では、システムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)、車両を安全な場所に移動させる形で、車両を制御するものである。 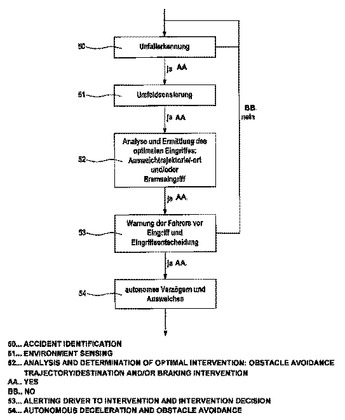 (もっと読む)
(もっと読む)
追従間隔制御を改良する方法
【課題】
追従間隔制御の快適性と安全性を向上させること。
【解決手段】
車両の追従間隔制御システムを改良する方法では、追従間隔制御の制動圧要件に車両の電子式制動制御システムのシステム制御が比較的にゆっくりな速度で行われるので、最高圧力増加率或いは減少率は超過しない。代用として、制動圧積分によりあらかじめ制動制御の計画が行なわれる。 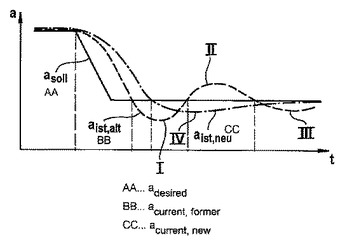 (もっと読む)
(もっと読む)
車両用の制御システム
本発明は、電子制御可能な駆動伝達系と、システム制御装置(6)に関連付けられる調整レベル(4)と、前記調整レベルにおいて車両の状態変数(ZG)から及び運転者の操作(FW)から生成される所望の値(SW)とを含む制御システム(1)に関する。アクチュエータ(A)を制御するために使用される作動信号(AS)は、前記所望の値から生成される。前記制御システムは、調整レベル(K)の下方に配置される実行レベル(AE)も備え、前記実行レベルは、作動信号(AS)を行うために使用されるアクチュエータ(A)を備える。本発明によれば、車軸(3)に関連付けられた少なくとも1つのブレーキアクチュエータ(AA1)を作動させるために使用される車軸電子モジュール(2)が設けられ、車軸(3)の領域に配置される。車軸電子モジュール(2)は、所望の値(SW)を送信するために、また所望の値(SW)から、それぞれの軸アクチュエータ(AA)を制御する作動信号(AS)を決定するために、調整レベル(K)に接続される。車軸電子モジュール(2)は、作動信号(AS)を送信するために使用される制御可能なデフロック(DS)に接続される。
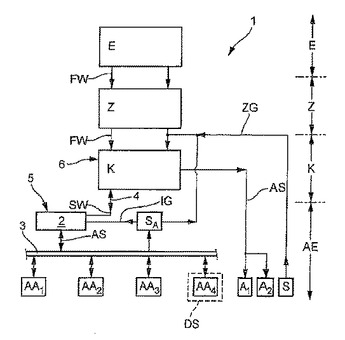 (もっと読む)
(もっと読む)
間隔警告システムを有する自動車内の疲労警告装置

運転者の疲労状態を検出するための運転者センサ技術(20)と間隔警告システムとを有しており,その間隔警告システムは環境センサ技術を有し,かつ,前を走行する車両に対する警告間隔を下回った場合に警告信号を出力し,および/または車両の駆動システムおよび/またはブレーキシステム(14,16)へ制御介入を行うように形成されている,自動車内の疲労警告装置は,間隔警告システムが調節装置(22)を有しており,その調節装置は,検出された疲労状態(E)に従って警告間隔を変化させるように形成されていることを特徴としている。 (もっと読む)
自動車における自動変速機の運転方法
本発明は、惰走運転段階中に、設定限界速度に到達するまで、例えば自動変速機にクラッチを介して結合し得る駆動エンジンの制動作用を利用するための変速機ダウンシフトが、クラッチの係合によって終了される、自動車における自動変速機の運転方法に関する。惰走運転段階の終了後における車両駆動装置の自発行動性を改善するために、本発明に基づいて、設定限界速度以下では、ダウンシフトがクラッチ解除状態で終了されるようにすることを提案する。 (もっと読む)
駆動系の制御方法
本発明は、内燃機関(1)と電気モータ(6)とを備えた車両の駆動系を制御する方法であって、それによって内燃機関の駆動軸(4)を電気モータ(6)を用いて加速させることが可能である。アップシフトの発生及び/又はアップシフト工程の開始において、駆動軸(4)のアイドリング回転数を電気モータ(6)によって増加させることが可能である。ターボ過給機が充填圧力を増加させるために設けられる場合、電気モータは、アイドリング回転数を増加させることで、低回転速度のターボ過給機の低効率を補うことが可能である。  (もっと読む)
(もっと読む)
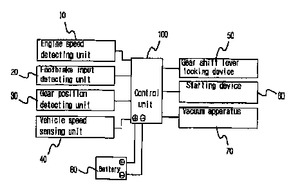
オートマチック車(AT車)を安全に発進させるためのシステム及びその方法
本発明は、事前に急発進事故の発生を防止する、AT車を安全に発進させるシステム及びその方法に関するものである。 該システムは下記を具備する。 エンジンの現回転数を検出するエンジン回転数検出ユニット10と、 フットブレーキが作動状態であるかどうかを検出するフットブレーキ入力検出ユニット20と、 シフトレバーがニュートラル(N)位置にあるどうかを検出するギア位置検出ユニット30と、 該フットブレーキ入力検出ユニットと並行して作動され、車両速度を感知する車両速度センサーユニット40と、 エンジン始動段階で、該フットブレーキが作動状態でなく、該シフトレバーがニュートラル位置になっていないときにはエンジンを始動させず、同時に、上記条件が満たされるようになっても、エンジン始動後にエンジン回転数が基準値未満に下がるまでは、該シフトレバーをニュートラル位置にシフトさせない制御装置100と、 該制御装置の制御下でエンジンを始動させる始動装置60と、 Hydro-vac内の空気を吸入し、該Hydro-vacを真空状態にするために、該制御装置100の制御下で作動される真空装置70。 エンジン始動段階では、該シフトレバーがニュートラル位置になく、該フットブレーキが非作動状態であるために安定した制動機能が無効になると、該エンジンは始動することが許されない。 エンジン始動後、上記条件が満たされた時に、該シフトレバーは、該エンジン回転数が基準値未満に下がるまで、ニュートラル位置から他の位置へシフトすることが許されず、それによって急発進が防止される。
 (もっと読む)
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 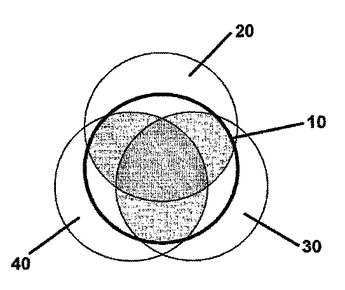 (もっと読む)
(もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
駆動力伝達制限装置
【課題】 従来のブリーダを簡単な構造で安価に部分改造するだけで、脱輪等の空転状態からの脱出を可能にし、通常の走行に何ら支障なく必要な時のみ作動させる。
【解決手段】 シリンダ本体22内にピストン28で画成された圧力室29に連通する導入側メイン通路32及び排出側メイン通路33と、該両メイン通路32,33に対し交差する係合穴34とをシリンダ本体22に開け、係合穴34に進退動可能に挿入したブリーダプラグ25を有するブリーダ24を設け、ブリーダプラグ25にはエア排出用の連通路37及び縮径部38,39を設け、該ブリーダプラグ25の進退動によって縮径部38,39を通じて両メイン通路32,33の連通と遮断とを選択的に行うことが可能である。
(もっと読む)
1,641 - 1,660 / 1,660
[ Back to top ]