
Fターム[3D041AB02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682) | バス、トラック (22)
Fターム[3D041AB02]に分類される特許
1 - 20 / 22
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
オートクルーズ制御装置

【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
車両の乗客監視装置
【課題】車室内における座席に着座していない乗員の状態を識別し、乗客の年齢等の識別信号によって、座席に着座していない乗員の年代に対応した状態を検知し、かかる識別信号に対応した運転制御ができる車両の乗客監視装置を提供する。
【解決手段】車両の車室内における乗員の動きを検知して、車両内の乗員の状況を監視する車両の乗客監視装置において、前記車室内における乗員の状況を検知する乗員状態検知装置と、該乗員状態検知装置からの乗員状況検知信号を受信して該乗員状況検知信号から座席に着座していない乗員を識別すると、該乗員識別信号を表示警報装置を介して運転者に検知させるとともに、前記車内の不安定状態を識別するとエンジン制御装置及びブレーキ制御装置をそれぞれ制御して前記車両の走行状態を加減する制御装置とを備える。
(もっと読む)
車両のロール角推定方法及び装置
【課題】車高調整非実行時のロール角を推定することが可能な方法及び装置を提供する。
【解決手段】左右サスペンションの自動車高調整開始時の一定時間前から終了時の一定時間後までの任意の異なる2つの時点の各々において測定した各変位及び各内圧値から、それぞれ第1及び第2のロール角と該左右サスペンションによる第1及び第2のロールモーメントとを算出し、該ロール角及びロールモーメントから、該サスペンションを装着した車両固有のロール剛性係数を算出する。該サスペンションが示し得る内圧値をパラメータとして予め求めた複数個の変位特性の内、該左右サスペンションの測定内圧平均値に対応する変位特性を、該自動車高調整非実行時の該左右サスペンションに共通の変位特性として選択する。そして、該第2のロール角及びロールモーメント、該ロール剛性係数、及び該選択した変位特性に基づき該自動車高調整非実行時のロール角を求める。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】青信号時間が変動する場合であっても、危険走行領域を特定することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間などに基づいて、自車両が黄信号開始時点で交差点の手前に停止する停止条件及び黄信号の終了時点で交差点に進入する進入条件を算出する。車載装置は、青信号の延長又は短縮時間の上限値、進入条件及び停止条件に基づいて、危険走行状態を特定する。
(もっと読む)
走行装置及び駆動制御装置
【課題】車両が備える駆動輪の回転速度を設定した目標回転速度になるように制御する場合において、車両が発進する場合に駆動輪を適切に制御して、ドライバビリティの低下を抑制すること。
【解決手段】走行装置100は、車両1に搭載されて車両1を走行させる。走行装置100は、左側前輪2fl、右側前輪2fr、左側後輪2rl、右側後輪2rrすべてが駆動輪となり、それぞれの駆動輪の駆動力を独立して変更することができる。そして、車両1の発進時においては、それぞれの駆動輪の回転速度が、車両1が備える操舵輪(左側前輪2fl及び右側前輪2fr)の操舵角から得られる旋回半径と、車両1に対する要求加速度と、に基づいて求められる目標回転速度となるように、それぞれの駆動輪へ動力が付与される。
(もっと読む)
車輪接地荷重の変化率に応じて制駆動力制御態様を変更する車輌
【課題】車輪に作用する制動力や駆動力を一旦低減した後漸増する制駆動力制御は多分に動的な制御であり、その態様は車輪接地荷重の変化率によってその最適性が異なることに着目してABS制御やTRC制御を更に改良する。
【解決手段】車輪と路面の間の滑りが増大したとき該滑りを低減する制駆動力制御を行う車輌に於いて、制駆動力制御開始点、制動力または駆動力の一時低減の速度や目標値、一時低減後の回復目標値等の制駆動力制御態様を車輪接地荷重の変化率に応じて変更する。
(もっと読む)
車両の発進制御装置
【課題】車両重量が検出されない場合であっても、的確な発進制御が実現できる車両の発進制御装置を提供する。
【解決手段】車両加速度と道路勾配より、車両重量を検出し、検出車重より発進時のギア段とエンジンへの燃料供給量を決定。当該手段から車両重量が検出されない場合は、車両発進時における燃料供給量を、車両重量が最も少ない場合の燃料供給量に設定するとともに、道路勾配検出手段が検出した道路勾配が閾値を越える場合は発進時のギア段を最低段数に設定する。
(もっと読む)
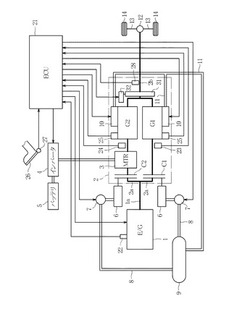
車両走行制御装置
【課題】エンジンと複数の変速段を有する変速機とを搭載した車両において、目標とする車両の走行状態を達成するため、燃料消費率を最適化するようにエンジンを制御するとともに、変速機の変速段をエンジンの作動状態に対応して適切に制御する。
【解決手段】車両走行制御装置5には、車間距離情報等から演算された目標駆動力によりエンジン1を制御するエンジン最適化演算装置5Bと、変速機2を制御する変速点補正演算装置5Cとが設けられる。エンジン最適化演算装置5Bは、最適燃料消費率マップを有する最適燃費点算出手段を備え、燃料消費率が最適となる最適エンジン回転数及びアクセル開度相当信号を算出する。最適エンジン回転数は変速点補正演算装置5Cに入力されて、ここで目標変速比と実変速比との偏差に基づくPID演算が行われ、車速補正量が算出される。変速機2の変速段は車速と車速補正量とを加算した信号により制御される。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。例えば、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる。また、自車速が所定値以下であり、操舵角あるいはヨーレイトのとる値が所定範囲外であるときには、段階的制動制御の起動を禁止する。さらに、変速制御による自動制動制御への影響を除去する。あるいは、変速制御により自動制動制御を援助する。
(もっと読む)
自動制動制御装置
【課題】 トラックやバスにおける自動制動制御を実現する。
【解決手段】 対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行い、この段階的制動制御は、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる制動制御を行うのに際し、運転者の正常運転状態を検出し、運転者の正常運転状態を検出しているときには、前記段階数を低減させる。運転者による方向指示器またはブレーキの操作の検出時刻から所定時間以上経過するまでの間は、当該運転者は正常運転状態にあると判断する。また、前記複数段階における最終段階から自動制動制御を開始する。
(もっと読む)
大型陸用車両においてエンジンアイドル運転モードを終了する方法
オートマチックトランスミッションを有する大型車両においてエンジンアイドル運転モードを終了するための方法。エンジンがアイドル速度で概ね一定して回転していて対応の概ね一定で比較的低い車両速度で車両を推進するギヤに係合した時に、車両においてエンジンアイドル運転モードが確立される。該方法は、エンジンアイドル運転モードにある時に、現状の概ね一定で比較的低い車両速度から加速するドライバ要求を受け取ることを包含する。要求された加速を達成するために、必要なエンジントルクが、エンジンアイドル運転が行われている同じギヤに前記オートマチックトランスミッションを維持している間に前記エンジンから発生されるかどうかを評価する。前記エンジンのトルク出力を上昇させることにより、前記オートマチックトランスミッションをシフトダウンすることなく、要求された加速は達成される。
(もっと読む)
多軸車両及びその操舵制御装置
【課題】 6輪車両や8輪車両のように3軸以上の車軸を有する多軸車両において、簡単な構成で小回り性能を向上させる。
【解決手段】 最前車軸22と最後車軸28の間に配置された1以上の中間車軸24、26に設けられた中間駆動輪34L、R、36L、Rを使って旋回を行なう。旋回を行う時、旋回外側の中間駆動輪34L、36Lの速度Voutを車速V0より高く制御し、かつ、旋回内側の中間駆動輪34R、36Rの速度Vinを車速V0より低く制御する。外側と内側の中間駆動輪の速度Vout、Vinは、操舵輪32L、R、34L、Rだけで旋回するときより小さい半径で旋回できるように、車速V0と操舵輪32L、R、34L、Rの操舵角ψとに応じて制御される。旋回時、中間駆動輪34L、R、36L、R以外の駆動輪32L、R、38L、Rへの動力伝達を切って、これらの駆動輪を遊動状態にする。
(もっと読む)
車両の横転防止装置
【課題】車両の重心高さによらず的確な横転の予知を行い、この予知に基づき要点を防止する車両の横転防止装置を提供することにある。
【解決手段】ステアリングホイールの操舵角速度を検出する操舵角速度検出手段4と、車体5に発生するロールレイトを検出するレイトセンサ6と、エアブレーキ装置を作動させる、またはエンジン出力を低下させて、車両1の横転を防止する安全措置を講じる安全措置実行手段と、前記操舵角速度検出手段で検出された前記ステアリングホイールの操舵角速度を車速センサ7により検出された車速に基づいて、3段階のレベルに設定し、前記操舵角速度が車両1の重心高さによってはロールオーバーになり得る所定角速度以上であるレベル1となる時で且つレイトセンサ6で検出された車体5のロールレイトが横転危険性が判断できる所定値以上である時にエアブレーキ装置8を作動させる。
(もっと読む)
クラッチ制御装置
【課題】 急激なアクセル操作に起因する駆動系振動発生時におけるクラッチ断による車両のショックや異音を防止することが可能なクラッチ制御手段を提供する。
【解決手段】 アクセルペダル13の踏込み量によるアクセル開度信号131を計測し、その変化量が例えば−300%/秒以下または300%/秒以上の場合にアクセル開度の急変があったと判断し、このような場合にギヤシフトに伴うクラッチ断が必要な場合には、クラッチ制御手段421が、半クラッチが例えば約0.2秒継続するような緩やかなクラッチ断制御を行うように指示し、半クラッチの間にエンジン出力トルクの急変による駆動系のねじれを開放し、車両のショックや異音を防止する。
(もっと読む)
車線逸脱防止装置
【課題】 荷重変動等により車両の重心位置が偏った場合に、この重心位置の偏りに起因して車線逸脱防止のためのヨーモーメント制御による効果を十分得られなくなることを回避する。
【解決手段】 車両の逸脱状況に応じて目標ヨーモーメントMsを算出しこれを実現するように前輪及び後輪の左右輪の制動力差を算出し各車輪を制御する。このとき、車両の重心位置を検出し、車両重心位置が車両後方にあるときほど後輪側の制動力が大きくなるように左右輪の制動力差を補正する。車両重心が車両後方に位置する場合、重心位置の偏りに起因して前輪側で期待する減速度を得ることができず、十分に自車両の向きを変えることができない可能性があるが、車両重心が車両後方にあるときほど後輪側の制動力差が大きくなるようにし、後輪側の減速度を増加させることで、期待するだけのヨー方向への挙動変動を実現することができ、車線逸脱を的確に回避することができる。
(もっと読む)
車両の制御装置
【課題】 ダンプトラックにおいて、荷台に積載する荷物の積載量によって積車モードと空車モードとのモード切換えするに当たり、同じアクセルペダルの踏込み量で増速しているときに、燃料供給量を変化させた場合のように走行に違和感を生じないようにする。
【解決手段】 空車、積車モードに各対応する変速用のシフトマップと断続クラッチの接続タイミングマップとを選択できるようにし、積車モードのシフトマップBは空車モードのものよりシフトポイントが高回転数になるよう設定され、接続タイミングマップDは半接続状態の時間が空車モードのものより長くなるように設定し、これより現実の走行に近いものにして走行に違和感がないものにする。
(もっと読む)
自動車用内燃機関
本発明は、少なくとも噴射される燃料量を表す信号によってエンジンの出力トルクを制御する記憶機能を持つ電子制御部材(20、23)を有する自動車用内燃機関に関する。異なる回転数におけるエンジントルクの基準値は前記制御部材に記憶される。トルク送信機(24)は現在の出力トルクを検出するとともに前記現在の出力トルクを表す信号を前記制御部材に送信する。前記制御部材は前記現在トルクを前記記憶された基準値と比較しエンジン性能が正常であるかどうかを判断する。 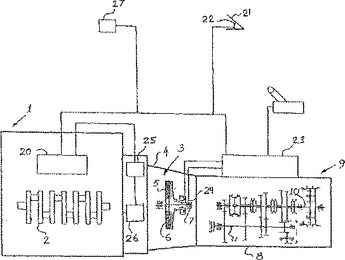 (もっと読む)
(もっと読む)
トルク制御方法
【課題】オートクラッチ機構によるクラッチ完接時の車両前後加速度の落ち込みを改善して滑らかな加速性を実現する。
【解決手段】オートクラッチ機構によりクラッチを自動的に断接する時のトルク制御方法に関し、電子制御による燃料噴射制御から運転者のアクセル開度に基づく燃料噴射制御に復帰させる際に、エンジン回転角速度とクラッチ回転角速度とが同期した時のエンジントルクに、クラッチ回転角加速度とエンジン回転慣性モーメントの乗算値を加算したエンジントルクを初期値とし、この初期値からアクセル開度で要求された目標エンジントルクへ徐変させる。
(もっと読む)
1 - 20 / 22
[ Back to top ]