
Fターム[3D041AD00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144)
Fターム[3D041AD00]の下位に属するFターム
推進装置、エンジン (3,466)
クラッチ (608)
サイドクラッチ
インチングクラッチ (2)
変速 (1,080)
ブレーキ (1,198)
車両外部状況 (949)
車両状況 (2,223)
Fターム[3D041AD00]に分類される特許
121 - 140 / 618
内燃機関の制御装置及び車両の制御装置
【課題】内燃機関の制御装置及び車両の制御装置において、製造コストの増加を抑制しながら内燃機関に発生する振動を低減可能とする。
【解決手段】内部で燃料を燃焼させることで発生した熱エネルギによりピストンを往復移動させて回転エネルギとして取り出すエンジン12と、モータ16による発電またはバッテリ31の蓄電により駆動可能なモータ19とを動力源として有し、エンジン12の燃焼により発生するトルク変動と、エンジン12におけるピストンの往復移動により発生するトルク変動とが互いに打ち消しあうように、エンジン回転数及びエンジン出力トルクを制御する。
(もっと読む)
車両の車線逸脱警報装置

【課題】自車両が走行している車線の走行区分線を検知することで、自車両の走行環境に応じて走行安全性と頻繁な警報作動の防止との両立を図ることができる車両の車線逸脱警報装置を提供する。
【解決手段】S10の判定の結果、Noの場合、左走行区分線Laが実線で右走行区分線Laが破線か否か判定し、Yesの場合、右側方或いは右斜め後に他車両CBが走行しているか否か判定する。S19の判定の結果、右側方或いは右斜め後に他車両CBが存在しない場合、左走行区分線Laに対して第2判定ラインLd2、右走行区分線Laに対して第1判定ラインLd1を夫々設定し、S5の車線逸脱判定ステップに移行する。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作度合のみならず、車両の安全走行の観点から、車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の運転操舵度合Ddが低いほど支援閾値THが低く設定される。そして、車両の安全走行のために必要な車両1の運転支援量Spが支援閾値TH_Sp以下であることを要件として、操舵装置11および制動装置12のうち一方または両方の動作が制御される。これにより、車両1の運転操作度合Ddが低くても、車両1の運転支援の必要性が低い場合には操舵装置11等の動作が制御される確率が低くなる。その一方、運転操舵度合Ddが高くても、車両1の運転支援の必要性が高い場合には操舵装置11等の動作が制御される確率が高くなる。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
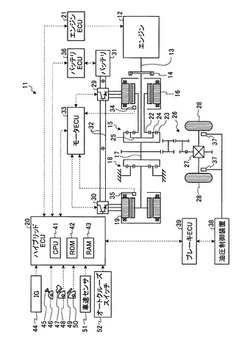
ハイブリッド車両
【課題】電気モータのロータが入力軸に係合する変速機構において、当該入力軸に対応するクラッチを係合状態にしたまま、変速段を切替える動作を行うことが可能なハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、第2変速機構40において現在、係合状態にある変速段である現変速段から、第2変速機構40において新たに係合状態にする変速段である新変速段に切替える場合、機関出力軸8から第2入力軸28に伝達されたトルクを打ち消すよう、電気モータ50により当該トルクとは逆向きのトルクを第2入力軸28に作用させて、第2変速機構40において現変速段を解放状態にする解放動作を行わせ、その後、第2入力軸28の回転速度が、車速と新変速段に基づいて設定された目標回転速度となるよう、内燃機関5及び電気モータ50を協調して作動させて、解放状態にある新変速段を係合状態にする係合動作を行わせる。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
車両用走行支援装置および車両用走行支援方法
【課題】障害物回避制御を行う場合に、運転者の違和感を抑制すること。
【解決手段】回避経路情報演算手段が、自車両が障害物と車幅方向で重なり始めるときに、自車両のヨーレートが障害物から自車両が遠ざかる向きとなるように回避経路の情報を算出する。車両挙動制御手段が、算出した回避経路の情報に基づき、当該回避経路に沿って自車両が走行するように自車両の挙動を制御する。このため、自車両が障害物と車幅方向で重なり始めたときに、自車両を障害物から遠ざかる向きに回頭させることができる。そして、自車両が障害物に近づく方向に向かうような感覚を運転者に与えることを防止できる。この結果、障害物回避制御を行う場合に、運転者の違和感を抑制できる。
(もっと読む)
走行支援装置
【課題】運転者が違和感や恐怖感を覚えることを抑制できる運転支援装置を提供する。
【解決手段】運転者の注視点を設定し、その注視点に基づいて走行軌道を設定する。一般的に、コーナーを走行する際には、運転者はコーナー出口付近を注視しつつ操舵を行なう。従って、運転者の注視点を設定し、注視点に基づいて走行軌道を設定すると、その走行軌道は、運転者が自分で操舵した場合の走行軌道に近い軌道となることから、運転者が違和感や恐怖感を覚えることを抑制できる。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線を検出できない場合があっても、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両側方の障害物を検出すると、運転者の操舵入力に基づき所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が、上記障害物に近い側の車線区分線を基準とした判定閾値に到達若しくは当該判定閾値よりも障害物側と判定すると、側方障害物に対する支援制御の開始と判定する。但し、障害物に近い側の車線区分線を検出できない場合には、上記制御開始を判定する際に基準とする車線区分線を車線幅方向外側へ変位させる。
(もっと読む)
車両の制駆動制御装置及び自動運転制御方法
【課題】自動運転の解除時の走行状況に応じて運転者の違和感を緩和する。
【解決手段】自車両の加減速制御を行い少なくともカーブ進入前にカーブを走行可能な目標車速に制御する自動運転制御を備える。その自動運転制御が解除されても、次のカーブまで自車両の減速状態が維持しない状態と推定される場合には、減速制御を維持する。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車両運動制御システム
【課題】既存の車両制御装置に対して大幅な変更を加えることなく、しかも互いの干渉を抑制して協調した動作を実現することのできる車両運動制御システムを提供する。
【解決手段】車両の挙動を制御する複数の車両制御装置としてのVSA及びRTCと、これらと通信線を介して接続される集中制御装置としての協調制御部17とを有し、VSA及びRTCと協調制御部はそれぞれ、規範ヨーレートを算出する規範ヨーレート算出部10,15,18を備えており、協調制御部が正常であるときは、VSA及びRTCの各々が、協調制御部から取得した規範ヨーレートに基づいて制御を行い、協調制御部が異常であるときは、VSA及びRTCの各々が、自装置内で算出された規範ヨーレートに基づいて制御を行うものとする。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】ドリフト走行時等において好適な旋回走行を実現するヨー制御を行う車両用動力伝達装置の制御装置を提供する。
【解決手段】予め定められた関係から前輪の横滑り角βf及び車体の速度Vに基づいて目標ヨー角速度γrefを算出する目標ヨー角速度算出手段66と、その目標ヨー角速度算出手段66により算出された目標ヨー角速度γrefに応じたヨーモーメントが得られるように前記トルク配分制御装置50の作動を制御するヨーモーメント制御手段70とを、備えたものであることから、車体の横滑り角が比較的大きいドリフト走行時においても、前輪横滑り角が旋回方向内側を向いている場合には旋回アシスト方向のヨーモーメントを発生させる等、ドリフト走行を妨げないヨー制御が実現できる。
(もっと読む)
車両用走行路面検出装置
【課題】簡単な構成でかつ小さい処理負担で、自車両が走行する走行路面の勾配状態を検出できるようにする。
【解決手段】第1地点で撮像された第1画像中の走行路面に基づいて、上記第1地点から該第1地点に対して所定距離先にある第2地点まで同じ勾配が継続すると仮定して、その仮想走行路面での第2地点の走行路幅を第1走行路幅として算出し(ステップS3,S4)、第2地点の手前近傍の地点に達したときに撮像された第2画像中の走行路面に基づいて第2地点の走行路幅を第2走行路幅として算出し(ステップS8,S9)、上記第1走行路幅と上記第2走行路幅との大小関係に基づいて、第2地点での走行路面の勾配状態を判定する(ステップS10)。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
車両制御装置
【課題】電力が確保されている状態であるエンジン停止前までに左右車輪についての中立復帰を行う車両制御装置を提供する。
【解決手段】車両制御装置は、左右後輪RW1、RW2を転舵するための電動モータ21を備えている。電動モータ21は、後輪転舵制御回路34により制御され、左右後輪RW1、RW2を目標舵角に転舵する。後輪転舵制御回路34は、イグニッションスイッチ37がオン状態からオフ状態へ切換られたことに応答して、電動モータ21を駆動して左右後輪RW1、RW2を中立位置に復帰させ、中立位置に復帰が完了した後にエンジンEを停止する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速させるための制御を実施する状態と実施しない状態とを利用者の意図通りに柔軟に切り替えることができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動制御と手動制御とを設定するための制御設定部における設定が手動制御から自動制御に切り替えられたことを判別し、前記設定が前記手動制御から前記自動制御に切り替えられた場合に、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるとともに、前記自車両の変速比を前記加速変速比に設定させる。
(もっと読む)
車両のトルクリミッタ装置
【課題】動力伝達経路にトルクコンバータ等の流体継手を備えていない車両において、アンチロックブレーキ装置の作動時に過大なトルクが周期的に作用し、低サイクル疲労によってシャフトやギヤ等の耐久性が低下することを簡便な制御で防止する。
【解決手段】アンチロックブレーキ装置90によってブレーキ力が制御されている時には、クラッチC1、C2の係合トルクTC1、TC2、具体的には油圧PC1、PC2が所定の低下率で低下させられるため、動力伝達経路にトルクコンバータ等の流体継手を備えていない本車両においても、クラッチC1またはC2のスリップによりアンチロックブレーキ装置90の作動に伴うトルク変動のピーク値が低くなり、低サイクル疲労による動力伝達経路の各部材の耐久性の低下が抑制される。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
121 - 140 / 618
[ Back to top ]