
Fターム[3D041AD00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144)
Fターム[3D041AD00]の下位に属するFターム
推進装置、エンジン (3,466)
クラッチ (608)
サイドクラッチ
インチングクラッチ (2)
変速 (1,080)
ブレーキ (1,198)
車両外部状況 (949)
車両状況 (2,223)
Fターム[3D041AD00]に分類される特許
141 - 160 / 618
車両配置決定装置
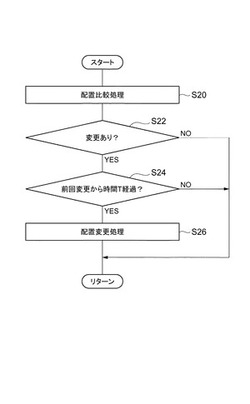
【課題】運転者や乗員等の要望を反映させて車群内の車両の配置を決定することができる車両配置決定装置を提供する。
【解決手段】
車群内の車両の配置を決定する車両配置決定装置1であって、複数の条件に対して車両ごとに設定された要望度を取得する要望度取得部11と、車群内の配置位置ごとに複数の条件の達成度を設定する達成度設定部12と、要望度及び達成度に基づいて各車両の配置を決定する配置決定部13とを備えることで、複数の条件に対する各車両の要望度を取得し、車群内の配置位置ごとに複数の条件の達成度を設定し、取得した要望度及び設定した達成度に基づいて各車両の配置を決定することができるので、各車両の要望の違いと、配置により得られる達成度の違いとを考慮して配置を決定することができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム

【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体が規定されている交通ルールを違反した場合でも自車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】移動体の交通ルールに基づいて運転支援を行う運転支援装置1であって、任意の領域において移動体が遵守する可能性の高い交通ルールを取得する交通ルール取得手段11,12,13を備え、交通ルール取得手段で取得した交通ルールに基づいて運転支援を行うことを特徴とし、特に、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない交通ルール逸脱領域を取得する領域取得手段13、あるいは、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない場合には交通ルール取得手段で取得した交通ルールに修正する交通ルール修正手段を備える構成とするとよい。
(もっと読む)
車両用減速制御装置及びその方法
【課題】分岐点でのカーブの状態に適合させて、減速制御を実施する。
【解決手段】車両用減速制御装置は、ナビゲーション装置14で地図情報の作成に使用するノード点を複数個用いて、車両前方の走行路の旋回半径を算出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が算出した旋回半径を基に、自車両を減速制御する制駆動力コントロールユニット8と、分岐点判定部61が自車両が走行する走路が分岐路であると判断したとき、該分岐路の所定範囲内のノード点の密度が小さくなるほど、減速制御のための目標減速度の抑制度合いを大きく補正する目標車速補正部62と、を備える。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
車両用障害物回避支援装置及び車両用障害物回避支援方法
【課題】回避操作支援の必要性の判定を精度良く実行可能として、運転者による障害物回避操作をより適切に支援できるようにする。
【解決手段】自車両が所定時間後までの間に障害物と接触することなく走行可能な自車両状態の範囲を回避可能集合として算出する。そして、現在の自車両状態と回避可能集合の境界との関係に基づいて、回避操作支援の必要性の有無の判定を行う。回避操作支援の必要性がある場合には、運転者の回避操作を支援する。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両の走行中運転席ドアが開いている場合にも、車両の走行を可能とする。
【解決手段】車両10に設けられた複数のドア14A、14Cが、走行中に開いているかどうかを検出し、いずれかのドア14A、14Cが開いていると検出されたとき、開いているドアが運転席ドア14Aであるかどうかを判定し、運転席ドア14Aのみが開いていると判定された場合に、車両10の走行を許可するようにしているので、運転席ドア14Aを開けて周りを確認しながら駐車する際、円滑に駐車することができる。
(もっと読む)
車両用走行制御装置
【課題】運転者による頻繁なスイッチ操作を不要とし、燃費性能の向上、及び、運転者による駆動力の増加要求に対するレスポンスの向上の両立を図ることが可能な車両用走行制御装置を提供すること。
【解決手段】自車両の周辺環境に関する周辺環境情報に基づいて、運転者による駆動力の増加要求の可能性の有無を推定する駆動力増加要求推定手段56を備え、駆動力増加要求の可能性が有ると推定される場合に、駆動力の増加要求に備えてスタンバイ制御を実行し、駆動力増加要求の可能性が無いと推定される場合に、スタンバイ制御を抑制する。これにより、運転者によるスイッチ操作を不要として、燃費性能向上制御のON/OFFを自動的に切り換え、燃費性能の向上と、駆動力増加要求に対するレスポンスの向上との両立を図ることができる。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
車両及び車両の制御方法
【課題】インバータ回路を三相短絡状態にした場合において、機器類の疲労の蓄積を抑制する。
【解決手段】ハイブリッド自動車20において、相短絡異常が生じたインバータ43を三相短絡状態にしている場合、モータMG3のコイル温度tmに基づいて後車軸69a,69bとモータMG3との共振による振動が発生する共振発生車速領域の下限値である閾値Vref1,上限値である閾値Vref2を設定し、車速センサ88が検出した車速が設定した共振発生車速領域に入るときにはダメージカウンタCに値1を加算する。そして、ダメージカウンタCが閾値Crefより大きいと判定されたときは、モータMG3などのリヤ側機器類がこれ以上振動による疲労を蓄積すべきでない状態であるとみなして、車速Vが閾値Vref1以上にならないよう要求トルクを制限し、制限後の要求トルクで走行するようエンジン22及びモータMG1,MG2を制御する。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両が衝突した場合に適切な処理を車両に施す。
【解決手段】車両走行制御装置50は、車両10の衝突を検出する衝突検出センサ16、18により衝突が検出されたとき、走行速度制限部22Aにより車両10の最高走行速度を制限速度に制限するようにしているので、衝突発生後の車両10を適切な速度で走行移動させることができる。衝突時の車両の最高走行速度は、例えば、運転中に直ちに停車できる徐行速度程度に制限する。
(もっと読む)
車両制御装置
【課題】路面の摩擦係数μやタイヤの入替え、摩耗等に拘らずヨーモーメントの制御が適切に行われるようにして旋回走行性能を向上させる。
【解決手段】ヨー角速度γおよび車体横すべり角βの各特性の変化を反映する前後輪のコーナリングパワーKf、Krをそれぞれリアルタイムに算出し、そのコーナリングパワーKf、Krを用いて車両のスタビリティファクターKHを算出するため、低μ路走行等の低グリップ状態かハイグリップタイヤ装着等の高グリップ状態かが反映され、低グリップ状態の場合には大きな値になる一方、高グリップ状態の場合には小さな値になる。そして、そのスタビリティファクターKHを含む項を減算して目標ヨー角速度γref が算出されることにより、路面μやタイヤの摩耗等の車両状態に応じて目標ヨー角速度γref が適切に設定され、そのような車両状態の相違に拘らずヨーモーメントが適切に制御されて旋回走行性能が向上する。
(もっと読む)
移動体の位置検出装置、および位置検出装置を利用した車両制御装置
【課題】高精度で相対位置を測定すると共に相対位置に誤差が積算されることを防止することが可能な位置検出装置、および当該位置検出装置を利用した車両制御装置を提供する。
【解決手段】移動体の位置検出装置10は、複数のGPS衛星からのGPS信号を受信する受信アンテナ11と、各GPS信号の搬送波の位相を検出開始時刻から所定時間ごとに検出し、当該所定時間ごとの位相差を積算することにより、検出開始時刻からの位相変化量を演算する位相差積算部15と、位相差積算部により演算された位相変化量に基づいて、検出開始時刻における基準位置に対する相対位置を演算する相対位置演算部16と、を備える。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両の進行方向に複数の障害物が存在する場合において、車両が各障害物のうち少なくとも1つの障害物と接触し得る緊急状態であるときには、該障害物との接触によって車両が被る損傷を小さくできる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】各ECUは、車両の進行方向に存在する各障害物のうち少なくとも1つの障害物に車両が接触する可能性がある場合(ステップS12が肯定判定)において、回避制御によって車両と各障害物との接触を回避可能であるとき(ステップS15が肯定判定)には、回避制御を実行する。一方、各ECUは、回避制御を実行しても車両が少なくとも1つの障害物に接触する可能性があるとき(ステップS15が否定判定)には、損傷低減走行軌跡55を設定し(ステップS19)、該損傷低減走行軌跡55に車両の実際の走行軌跡が接近するように損傷低減姿勢制御を実行する(ステップS20,S21)。
(もっと読む)
車両の制駆動力制御装置
【課題】 操舵力のヒステリシスを考慮した制御を行うことにより、高速走行時と低速走行時とのいずれにおいても、安定したステアリング性能を得ることができる車両の制駆動力制御装置を提供する。
【解決手段】 目標ヨーレートr_refとヨーレートセンサ4によって検出されたヨーレートrとの差分であるヨーレート差分Δrがヒステリシスしきい値r_hys以下か否かを判断する。このとき、目標ヒステリシスを実現する目標ヨーモーメントDYM_absを求め、この目標ヨーモーメントDYM_absを達成する左右輪WL,WRに対する制駆動力配分を算出する
(もっと読む)
車両安定化制御装置
【課題】より広い車両状態領域で車両の安定性を確保できる車両安定化制御装置を提供すること。
【解決手段】ECU90の処理部91に、目標車両状態量を導出する目標車両状態量導出部102と、実車両状態量であるヨーレートを取得するヨーレート取得部96と、実車両状態量である横Gを取得するG取得部97と、車両状態量安定化制御を行う車両状態量安定化制御部104と、目標車輪速差を導出する目標車輪速差導出部105と、実車輪速差を取得する実車輪速差取得部106と、車輪速差安定化制御を行う車輪速差安定化制御部109と、を設ける。これにより、車両状態量では挙動の変化を判断できない車両状態領域では、車輪速差安定化制御を行うことができるので、車両状態量では挙動の変化を判断できない車両状態領域でも、車両1の挙動の安定化を図ることができる。この結果、より広い車両状態領域で車両1の安定性を確保することができる。
(もっと読む)
駆動力制御装置
【課題】駆動力源からタイヤに伝達されるトルクを振動させる場合に、トルクの伝達経路で衝突音が生じることを抑制する。
【解決手段】車両が走行するにあたり、駆動力源からタイヤに伝達する基準トルクを求め、基準トルクから振動トルクを求め、駆動力源からタイヤに振動トルクを伝達することにより、タイヤと路面との間における摩擦係数を制御する駆動力制御装置において、駆動力源から前輪のタイヤおよび後輪に至る経路に減速機が設けられており、減速機を経由して前輪および後輪のタイヤに伝達される振動トルクが、駆動側と回生側とを交互に行き来するか否かを判断する判断手段(ステップS4)と、振動トルクが駆動側と回生側とを交互に行き来すると判断された場合は、振動トルクが駆動側または回生側の一方となるように、前輪に伝達する要求トルクと、後輪に伝達する要求トルクとの分配比を制御するトルク分配比制御手段(ステップS5)とを有する。
(もっと読む)
動力伝達機構の制御装置
【課題】例えば、燃費を極力悪化させないように触媒の温度を高め、車両の走行に必要な駆動力を駆動輪に伝達する。
【解決手段】ECU(10)は、ロックアップピストン(21a)のフェーシング(21b)とコンバータカバー(26)とを滑らせる状態(スリップ状態)にするスリップ制御を行う。例えば、ECU(10)は、エンジン(1)の排気を浄化する触媒の触媒温度が当該記触媒の浄化可能温度より低く、且つ当該触媒温度及び浄化可能温度の温度差が所定の温度差より大きい場合に、ロックアップクラッチ(21)のスリップ量を増大させるようにトルクコンバータ(2)を制御すると共に、スリップ量が所定のスリップ量を超えた際にロックアップクラッチ(21)を解放するようにトルクコンバータ(2)を制御する。
(もっと読む)
車両用電動式操舵装置
【課題】転舵用アクチュエータが故障したフェールセーフ作動時においても、ステアリング操作量及び車両挙動の状態に基づいて推定された操舵反力を操舵手段へ付与し、ドライバが常に操舵手段と転舵機構とが機械的に連結されたかの如き感覚で操舵を行い得るようにした車両用電動式操舵装置を提供する。
【解決手段】車両の操舵を行う操舵部と、車両の車輪を転舵する転舵部とが機械的に連結されておらず、操舵に応じて転舵部の転舵用アクチュエータを介して転舵する車両用電動式操舵装置において、転舵用アクチュエータが故障した場合、左右輪の駆動力又は制動力を独立に制御し、車両の旋回運動を制御すると共に、操舵部側へ車両挙動に応じた操舵反力を与える機能を具備する。
(もっと読む)
141 - 160 / 618
[ Back to top ]