
Fターム[3D041AD33]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 変速 (1,080) | 変速段、変速比位置 (881) | 後進レンジ (8)
Fターム[3D041AD33]に分類される特許
1 - 8 / 8
作業車両の制御装置
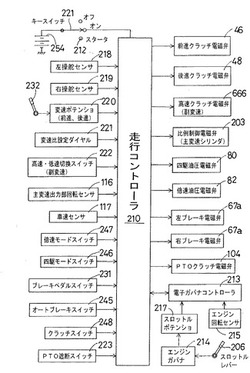
【課題】発進と走行停止、前進と後進の切換などの各操作を、操作レバー232の変速操作にて簡単に実行できる作業車両の制御装置を提供するものである。
【解決手段】走行車輪3,4を備えた走行機体2に搭載されたエンジン5からの動力を変速する油圧式無段変速機29と、油圧式無段変速機29の変速比を変更する操作レバー232と、油圧式無段変速機29からの変速駆動出力を前記走行車輪3,4に伝達する走行用クラッチ40,42と、走行車輪3,4を制動するブレーキ65とを備えてなる作業車両において、操作レバー232の前進操作又は後進操作によって走行用クラッチ40,42が入り作動した状態で、走行車輪3,4のブレーキ解除が確認されたときに、操作レバー232の操作量に応じて、予め設定した変速比パターンに基づき、油圧式無段変速機29の出力回転数が制御されるように構成したものである。
(もっと読む)
駐車支援装置

【課題】本発明は、駐車空間への駐車を適切に行うことができる駐車初期位置に誘導できなくなる事態を抑制することができる、駐車支援装置の提供を目的とする。
【解決手段】自車両周辺の有体物に隣接する空間であって自車両の進行方向に対して奥側の駐車空間への駐車が可能な駐車初期位置に自車両の誘導を行う駐車支援ECU12等を有する駐車支援装置であって、駐車初期位置に自車両の誘導を開始するタイミングを車速センサ18によって検出された自車両の車速に基づいて設定する支援開始タイミング設定部12Bを備えることを特徴とする、駐車支援装置。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
管理機
【課題】主変速操作および作業部変速操作をそれぞれ別の変速レバーで行う管理機について、主変速操作および作業変速操作を簡単に行うことができるものを提供すること。
【解決手段】走行部4、作業部5、前記走行部4および作業部5を駆動させる原動機2、原動機2からの動力を前記走行部4に伝達する走行用ギア部3aおよび作業部5に伝達する作業用ギア部3bを有するミッション部3、前記走行用ギア部3aの変速を行うための主変速レバー10、前記作業用ギア部3bの変速を行うための耕耘変速レバー20とを備えている管理機1において、走行部4が後退動作状態になる操作位置に前記主変速操レバー10を移動させると、作業部5への動力伝達が切断状態になる操作位置に耕耘変速レバー20を移動させる作業モード切換手段を備えた。
(もっと読む)
作業車両の制御装置
【課題】サイクルタイム短縮のため、車両が前進状態で後進操作がなされる場合があり、このような場合、後進クラッチに大きな熱負荷がかかる。また変速ショックが大きい。これをブレーキ制御にて対応する。
【解決手段】車体の現在の走行方向が前進走行方向Fであるか後進走行方向Rであるかを判別し、走行操作レバーの選択操作位置が切り換えられた際に、走行操作レバーで選択されている走行方向位置(例えばR)と、上記の判別されている走行方向(たとえばF)とが逆の走行方向になっており、かつ、検出車体速度が所定のしきい値以上になっていることを条件に、ブレーキ装置を作動させる。また、走行操作レバーの選択操作位置が切り換えられた際に、検出車体速度が所定のしきい値以下になっていることを条件に、ブレーキ装置の作動を解除する。
(もっと読む)
車両の制御装置
【課題】 ブレーキ振動あるいは異音の発生を防止もしくは抑制するための制御が行われる際に、車両の走行状態が変化して乗員に違和感を与えてしまうことを回避できる車両の制御装置を提供する。
【解決手段】 乗員の操作と独立して制動装置を制御して各車輪の制動トルクを設定する制動トルク設定手段と、制動装置の振動を検出する振動検出手段(ステップS101)とを備え、制動装置の振動が検出された場合に振動を抑制する車両の制御装置において、乗員の操作と独立して動力源の出力を制御して各車輪の駆動トルクを設定する駆動トルク設定手段と、車両の走行状態を検出する走行状態検出手段(ステップS102)と、制動装置の振動が検出された場合に、走行状態に基づいて制動トルクと駆動トルクとの少なくともいずれか一方を変更する振動抑制手段(ステップS104,S105)とを備えている。
(もっと読む)
車両の後退旋回制御装置
【課題】 低コストのシステムとしながら、後退時の旋回性能を向上させ、車庫入れや縦列駐車等での高い操縦性を得ることができる車両の後退旋回制御装置を提供すること。
【解決手段】 左右後輪RR,RLの駆動力と制動力の少なくとも一方を左右でそれぞれ独立に制御可能なシステムを備えた車両において、後退旋回走行を検出する後退旋回走行検出手段(ステップS1,ステップS5)と、後退旋回走行時、左右後輪RR,RLのうち旋回内輪側のタイヤ回転を抑制する制駆動力を付与する制御を行う後退旋回制御手段と、を備えた。
(もっと読む)
車両の走行制御装置
【課題】 自車両の走行状態に運転者の運転意志を適切に反映させる。
【解決手段】 制御ECU11は、停止保持制御により自車両の停止状態を保持している状態で、少なくとも、運転者によるブレーキ操作、または、運転者によるリバースポジションまたはニュートラルポジションへのシフト操作が検出された場合に、停止保持制御により自車両の停止状態を所定時間に亘って継続させた後に停止状態の保持を解除、あるいは、ブレーキ圧を減少傾向に変更させて自車両の停止状態の保持を解除させる。
(もっと読む)
1 - 8 / 8
[ Back to top ]