
Fターム[3D041AD41]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | ブレーキ (1,198)
Fターム[3D041AD41]の下位に属するFターム
パーキングブレーキ作動 (55)
急ブレーキ (3)
アンチスキッド作動 (22)
Fターム[3D041AD41]に分類される特許
1 - 20 / 1,118
クルーズコントロールシステム
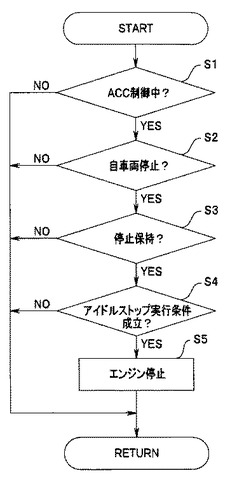
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
変速制御装置

【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
前後駆動力配分比制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる四輪駆動車の前後駆動力配分比制御装置を提供することを目的とする。
【解決手段】車両における前輪と後輪との駆動力を変化させることのできる前後駆動力配分比制御装置において、前後加速度が生じる場合の目標スタビリティファクタを求める目標値算出手段(ブロックB2)と、前記目標値算出手段によって求められた目標スタビリティファクタと車両に実際に生じている前後加速度に応じて変化する加速度検出値とに基づいて前輪と後輪との少なくともいずれか一方に対する駆動力の配分比を求める前後配分比算出手段(ブロックB3〜B7)とを備えている。
(もっと読む)
クリープ車速制御装置
【課題】運転者による運転操作を複雑化することなく、クリープ速度を所望の速度に容易に調整することが可能なクリープ車速制御装置を提供すること。
【解決手段】ブレーキペダルの踏込量に応じてクリープ車速の目標車速を定める。そして、車両のクリープ車速が目標車速となるように、原動機16によって発生される駆動トルク及びブレーキ装置26によって発生される制動トルクを制御する。このため、車両の運転者は、ブレーキペダルの踏込操作により、車両のクリープ車速を、容易に所望の速度に調整することができ、さらに、その増減の調整も容易となる。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することにある。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた両踏み状態になった場合の安全性を確保しながらブレーキ先踏みの両踏み時の坂道発進を実施できるようにする。
【解決手段】アクセルの踏み込み後にブレーキが踏み込まれて両踏み状態になった場合(アクセル先踏みの両踏み時)には、通常通りに出力制限制御(エンジン11の出力を制限する制御)を実行する。また、ブレーキの踏み込み後にアクセルが踏み込まれて両踏み状態になった場合(ブレーキ先踏みの両踏み時)には、アクセル先踏みの両踏み時に比べて出力制限制御による出力低下度合を小さくする出力制限緩和処理を実施して、坂道発進に必要な出力を確保できる程度に出力制限制御を実行する。更に、ブレーキの踏み込みと同時にアクセルが踏み込まれて両踏み状態になった場合(ブレーキ・アクセル同時踏みの両踏み時)には、出力制限緩和処理を実施せずに通常通りに出力制限制御を実行する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
自動車
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
走行支援装置
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
車両の制御装置
【課題】旋回性能向上制御を実行する場合に、エンジンの始動・停止に起因するドライバビリティの低下を回避して、車両の旋回性能を適切に向上させることができる車両の制御装置を提供すること。
【解決手段】少なくとも内燃機関を駆動力源として有し、旋回走行中に該駆動力源の出力によって発生させる駆動力もしくは制動力を補正することによりスタビリティファクタを目標値に追従するように変化させる旋回性能向上制御を実行する車両の制御装置において、前記旋回性能向上制御を実行する場合に、前記内燃機関の運転状態が停止から始動にもしくは燃焼運転から停止に切り替えられることがないように前記駆動力もしくは前記制動力を補正する駆動力補正手段(ステップS2〜S7)を設けた。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
車両の動力伝達制御装置
【課題】電動機の出力軸に対する駆動輪の減速比を変更する切替機構を備えたHV−MT車において、運転者が前記減速比の変更に伴うショックを感知し難くすること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関E/GとモータM/Gとを備えたハイブリッド車両に適用され、手動変速機M/Tと、摩擦クラッチC/Tと、減速比切替機構とを備える。減速比切替機構は、「M/Gの出力軸と接続される第1軸」に対する「M/Tの出力軸と接続される第2軸」の減速比を変更可能となっている。第1軸に対する第2軸の減速比を変更することにより、M/Gの出力軸に対する駆動輪の減速比が変更される。運転者がクラッチペダルCPを操作している間に減速比を変更する作動が実行される。即ち、運転者は、何らかの操作を行っている間に減速比変更作動に伴うショックを受けることなり、運転者は係るショックを感知し難くなる。
(もっと読む)
車両のアイドルストップ制御装置
【課題】実際の運転シーンに即して、不要なアイドルストップのみを適切に抑制してアイドルストップによる燃費の低減や、排気ガスの低減の効果を十分に得る。
【解決手段】通常、予め設定しておいたアイドルストップ実行条件が成立した場合に、エンジン制御装置50に信号を出力して、エンジン2のアイドル運転を停止してエンジン2を自動停止させるアイドルストップを行わせるが、自車両1の前方環境情報と障害物情報と停止するまでの自車両1の運転状態の少なくとも一つに応じて自車両1が障害物に対して危険回避のための車両停止を実行したか否かを判断し、自車両1が障害物に対して危険回避のための車両停止を実行したと判断した場合は、エンジンの自動停止を禁止する。
(もっと読む)
1 - 20 / 1,118
[ Back to top ]