
Fターム[3D041AE04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | スロットル弁開度 (515)
Fターム[3D041AE04]の下位に属するFターム
空気吸入量、吸気管負圧 (32)
Fターム[3D041AE04]に分類される特許
1 - 20 / 483
車両用運転操作支援装置
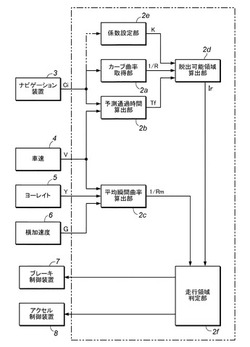
【課題】実車位置とナビゲーション装置上の自車位置とにずれが生じていた場合でもカーブを脱出する際の加速操作に対する違和感を運転者に与えることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からカーブ情報を取得し、カーブ情報からカーブを抜け出るための脱出可能領域を設定し、車速V・ヨーレイトY・横加速度Gから走行状態を取得し、カーブの長さと車速とから通過時間を求め、走行状態から平均瞬間曲率を求め、平均瞬間曲率を積分して自車が脱出可能領域にある場合には速度抑制制御を解除する。ナビゲーション装置のみでカーブ走行時の運転操作支援を行う場合のずれを防止することができ、運転操作支援としてカーブ走行自に減速制御する場合に、運転者がカーブ脱出のために加速操作しようとした場合に減速制御を続けてしまうという違和感を運転者に与えることを防止し得る。
(もっと読む)
変速制御装置

【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両の制御装置
【課題】 車両減速状態における機関出力制御及びロックアップクラッチ締結制御を適切に行い、運転者の違和感を解消するとともに燃費を向上させることができる車両の制御装置を提供する。
【解決手段】 ロックアップクラッチ30を締結するときの目標メインシャフト回転数NTMOBJに応じてLC制御下限トルクTRQLMLを設定し、車両減速中において機関出力がLC制御下限トルクTRQLMLに達した後はLC制御下限トルクTRQLMLに保持する制御を実行し、機関出力がLC制御下限トルクTRQLMLに保持されている期間においてロックアップクラッチ30の締結を実行する(t2)。機関出力をLC制御下限トルクTRQLMLに保持する出力保持制御を実行することにより、機関回転数NEが目標メインシャフト回転数NTMOBJ近傍に維持される。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
車両の制御装置
【課題】旋回性能向上制御を実行する場合に、エンジンの始動・停止に起因するドライバビリティの低下を回避して、車両の旋回性能を適切に向上させることができる車両の制御装置を提供すること。
【解決手段】少なくとも内燃機関を駆動力源として有し、旋回走行中に該駆動力源の出力によって発生させる駆動力もしくは制動力を補正することによりスタビリティファクタを目標値に追従するように変化させる旋回性能向上制御を実行する車両の制御装置において、前記旋回性能向上制御を実行する場合に、前記内燃機関の運転状態が停止から始動にもしくは燃焼運転から停止に切り替えられることがないように前記駆動力もしくは前記制動力を補正する駆動力補正手段(ステップS2〜S7)を設けた。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
車両制御装置
【課題】自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供すること。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
(もっと読む)
車両の制御装置
【課題】ロックアップクラッチを有する流体式動力伝達装置を搭載した車両に対し、燃料消費率の更なる改善を図ることが可能な車両の制御装置を提供する。
【解決手段】ロックアップクラッチ付きのトルクコンバータを搭載した車両に対し、ロックアップクラッチの減速時スリップ制御時、ロックアップクラッチの油圧学習が未完了の場合にはロックアップ解放車速を高く(V2に)設定し、ロックアップクラッチの油圧学習が完了した場合にはロックアップ解放車速を低く(V2’に)設定する。また、車両の定常走行時、ロックアップクラッチの油圧学習が未完了の場合にはエンジン回転数を高く設定し、ロックアップクラッチの油圧学習が完了した場合にはエンジン回転数を低く設定する。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
火花点火内燃機関
【課題】ハイブリッド車両の火花点火内燃機関において、車両減速時にモータ・ジェネレータを発電機として作動させることができないときに、火花点火内燃機関の振動及び騒音の増大を抑制して比較的大きなエンジンブレーキを発生させる。
【解決手段】モータ・ジェネレータと共にハイブリッド車両に組み込まれる火花点火内燃機関において、機械圧縮比可変機構を具備し、車両減速時に前記モータ・ジェネレータを発電機として作動させることができないときには(ステップ102)、自動変速器により機関回転数を高める(ステップ109)と共に機械圧縮比可変機構により実圧縮比を低下させる(ステップ108)。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
車両制御装置
【課題】運転者の意図に即した走行と燃費の向上を両立させることのできる車両制御装置を提供する。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化より遅くする指標設定手段(ステップS2)を有し、前記車両の駆動力源の出力を制御することに伴って、予め定めた範囲内で駆動力源の燃費エネルギ効率を変化させるように、前記指標に基づいて走行特性を補正設定するように構成された制御器(ステップS8)を備えている。
(もっと読む)
1 - 20 / 483
[ Back to top ]