
Fターム[3D041AE31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 変速 (1,291) | 最適ギヤ段、最適変速比 (935)
Fターム[3D041AE31]の下位に属するFターム
Fターム[3D041AE31]に分類される特許
1 - 20 / 615
クルーズコントロールシステム
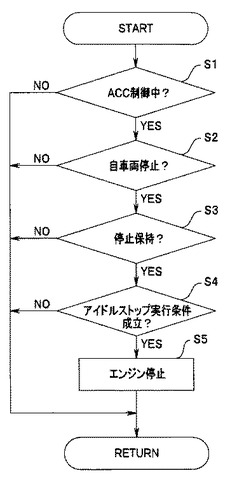
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
走行支援装置

【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を全体として効率的に運転でき、もって燃費向上を達成できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】バッテリ18のSOCが十分であるときに変速機8の変速段を一段飛び越えて切り換えるスキップ制御モードを実行し、通常制御モードで第3速または第5速が選択されるべき領域で第4速または第6速を選択することにより、エンジン2の回転域を低回転側に移行させて燃料消費量を低減する。これにより生じるエンジントルクの不足分を電動機6のトルク増加で補償することにより、運転者の要求トルクを達成する。
(もっと読む)
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
車両の動力伝達制御装置
【課題】電動機の出力軸に対する駆動輪の減速比を変更する切替機構を備えたHV−MT車において、運転者が前記減速比の変更に伴うショックを感知し難くすること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関E/GとモータM/Gとを備えたハイブリッド車両に適用され、手動変速機M/Tと、摩擦クラッチC/Tと、減速比切替機構とを備える。減速比切替機構は、「M/Gの出力軸と接続される第1軸」に対する「M/Tの出力軸と接続される第2軸」の減速比を変更可能となっている。第1軸に対する第2軸の減速比を変更することにより、M/Gの出力軸に対する駆動輪の減速比が変更される。運転者がクラッチペダルCPを操作している間に減速比を変更する作動が実行される。即ち、運転者は、何らかの操作を行っている間に減速比変更作動に伴うショックを受けることなり、運転者は係るショックを感知し難くなる。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
オートクルーズ制御装置
【課題】高い加速性能を必要としない状況では極力低いエンジン回転数での走行を行うことで、低燃費で経済的な巡航走行を行うことのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ走行中の車間距離制御実行時(S1)には、車両負荷度、エンジン出力、シフトアップ後のエンジン回転数の判定を行い(S2、S4、S5)、高い加速度を必要としない前走車追従時にはシフトアップを実施する(S6)。
(もっと読む)
車両の駆動力制御装置
【課題】 アップシフト時の変速ショックを抑制すると共に、イナーシャトルクを有効に利用してエネルギー効率を向上できる車両の駆動力制御装置を提供する。
【解決手段】 車両は、エンジンENG、電動機MG、二次電池1、及び検知手段21cを有する駆動力制御装置21を備える。駆動力制御装置21は、アップシフト時のイナーシャ相中に、エンジンENGのイナーシャトルクが駆動輪に伝達されることを阻止するように、検知手段21cで検知されたイナーシャトルクに基づいて電動機MGで発電させて二次電池1に充電する回生を行なうか、又は電動機MGの駆動力を減少させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
作業車両
【課題】重負荷時には、エンジン回転数を低下させ、車速を低下させることにより、エンストを防止することができ、軽負荷時には、エンジン回転数の上昇を抑制して低燃費で走行することができる作業車両を提供する。
【解決手段】エンジン負荷率Lが、設定した重負荷値L1よりも大きくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを増加させ、エンジン回転数Nrがエンジン回転数上限値Nmaxまで増加した後、エンジン負荷率Lが、設定した重負荷値L2よりも大きくなった場合、車速Vを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する重負荷モードと、エンジン負荷率Lが設定した軽負荷値L4よりも小さくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する軽負荷モードと、を備える。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】自動変速機の入力軸に動力伝達可能に連結された電動機を備える車両用動力伝達装置において、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフトの際にガタ打ちに伴うショックを抑制する。
【解決手段】車両10が被駆動状態であるときに変速機入力トルクTATを零に向かって制御する際にその変速機入力トルクTATが零に近づくに伴って、車両状態に基づいて変速機入力トルク変化率が抑制されるので、ガタ打ちに伴う振動が抑制される。また、そのガタ打ちを起振源とするガタ打ち後の振動も抑制される。よって、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフト時において、ガタ打ちに伴うショック(すなわちガタ打ちショックやガタ打ち後の振動的なショック)や歯打ち音が抑制される。
(もっと読む)
車両制御装置
【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
作業車両の駆動系制御装置
【課題】作業車両141において、低速走行しながらの各種作業中に排気ガス浄化装置50を強制再生させることなく、前記排気ガス浄化装置50の詰りを解消できるようにする。
【解決手段】走行機体142に搭載されたエンジン70と、該エンジン70に燃料を噴射するコモンレール式の燃料噴射装置117と、前記エンジン70からの動力を変速する無段変速機159と、前記エンジン70の排気系に配置された排気ガス浄化装置50とを備える作業車両141において、前記エンジン70の回転速度N及びトルクTに関するエンジン運転点Qが、前記排気ガス浄化装置50を自己再生できない低速低トルク側にある場合は、前記排気ガス浄化装置50の自己再生が可能な高速低トルク側に前記エンジン運転点Qを移行させると共に、前記走行機体142の車速Vを変更しないように前記無段変速機159の変速比を変更調節する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
1 - 20 / 615
[ Back to top ]